 Madhava Publications
Madhava Publications
1. Mechanical properties of solid
Introduction
While studying rotational motion, we restricted ourselves to simpler situations of rigid bodies. A rigid body generally means a hard solid object having a definite shape and size. But in reality, bodies can be stretched, compressed and bent. Even the appreciably rigid steel bar can be deformed when a sufficiently large external force is applied to it. This means that solid bodies are not perfectly rigid. A solid has a definite shape and size. In order to change (or deform) the shape or size of a body, a force is required
When we pull a helical spring by hanging a mass with it, it will get stretched and hence change its length and shape. As soon as we remove the hanging mass, the spring will instantly regain its original shape and size.
The property of a body, by virtue of which it tends to regain its original size and shape when the applied force is removed, is known as elasticity and the deformation caused is known as elastic deformation.
What are the Mechanical Properties of Solids?
Mechanical properties of solids elaborate the characteristics such as the resistance to deformation and their strength. Strength is the ability of an object to withstand the applied stress, to what extent can it bear the stress. Resistance to deformation is how resistant an object is to the change of shape. If the resistance to deformation is less, the object can easily change its shape and vice versa. Therefore, some of the mechanical properties of solids include:
- Elasticity: When we stretch an object, it changes its shape and when we leave, it regains its shape. Or we can say it is the property to regain the original shape once the external force is removed. Example: Spring
- Plasticity: When an object changes its shape and never comes back to its original shape even when an external force is removed. It is the property of permanent deformation. Example: Plastic materials.
- Ductility: When an object can be pulled in thin sheets, wires, or plates, it has ductile properties. It is the property of being drawn into thin wires/sheets/plates. Example: Gold or Silver
- Strength: The ability to withstand an applied stress without failure. Many categories of objects have higher strength than others.
In this chapter, we will study elasticity in detail
Elastic body and Elasticity
A body that returns to its original shape and size on the removal of the deforming force (when deformed within a certain limit) is called an elastic body.
The property of matter by virtue of which it regains its original shape and size when the deforming force has been removed is called elasticity. For example: If we stretch a spring and release it, it will regain its original size.
Now let us understand how it happens?
Whenever a load is attached to a thin hanging wire, it elongates and the load moves downward. The amount by which the wire elongates depends on the amount of load and the nature of the material.
The cohesive force between the molecules of hanging mass offers resistance against the deformation and the force of resistance increases with the deformation.
As soon as the deformation force is removed, the wire tries to regain its original shape. Thus we may conclude that if some external force is applied to a body, it has two effects on it.
- Deformation of the body.
- Internal resistance (restoring) forces are developed.
Stress
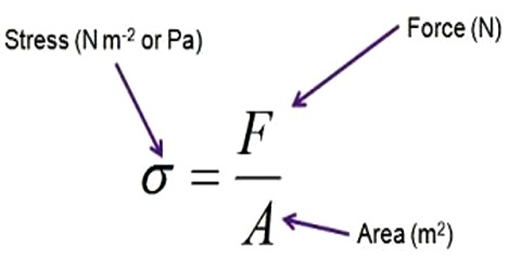
Whenever an external force is applied to a body, at each cross-section of the body, an internal restoring force is developed which tends to restore the body to its original state. The internal restoring force per unit area of the cross-section of the deformed body is called stress.
It is usually denoted by the σ (sigma)
![]()
S.I unit ![]()
Its dimensional formula is![]()
Depending on the ways the deforming force are applied to a body, there are three types of stress
- Longitudinal stress / Normal stress
- Shearing stress
- Volume stress
Normal stress
It is defined as the restoring force per unit area acting perpendicular to the surface of the body. It is of two types
Longitudinal or Tensile stress
When two equal and opposite forces are applied at the end of a circular rod as shown in the figure and increase its length, a restoring force equal to the applied force F normal to the cross-section of the rod comes into existence. This restoring force per unit area of cross-section is known as tensile stress.
Tensile stress = F/A
Consider a rod of length l, Force F area applied on it due to which the final length of the rod becomes
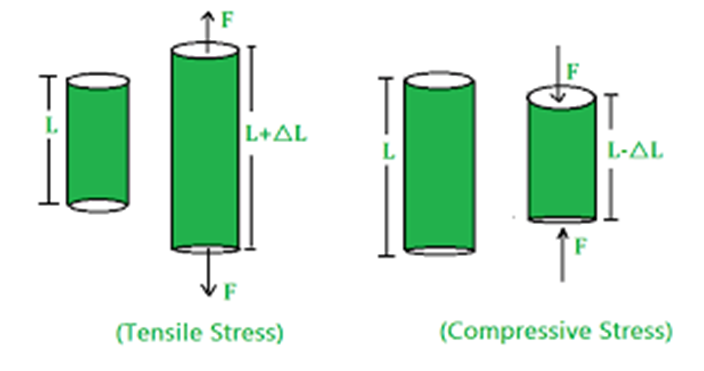
When two equal and opposite forces are applied at the ends of a rod as shown in the figure to decrease in length or compress it, then again restoring force equal to the applied force F comes into existence. This restoring force per unit area of the cross-section of the rod is known as compressive stress.
Compressive stress = F/A
Consider the length of the rod is L, when two equal force is applied, the final length of the rod becomes
Under tensile stress or compressive stress, the net force acting on an object is zero but the object is deformed. Tensile stress and compressive stress are also terms as longitudinal stress.
Shearing or Tangential stress
When a deforming force acts tangentially to the surface of a body, it produces a change in the shape of the body without any change in volume. This tangential force applied per unit area is equal to the tangential stress.
Tangential stress = F/A
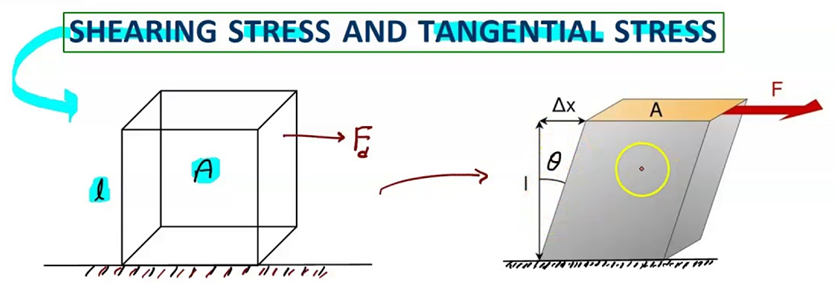
In the case of tangential stress, the deforming force F is applied on a top surface of the cubical body in a tangential direction due to which the upper face is deformed by an angle
Volumetric Stress or Bulk Stress
If a body is subjected to a uniform force from all sides, then the corresponding stress is called volumetric stress. There is a change in the volume of the body but not a change in a geometric shape.
Bulk / volumetric stress = F/A
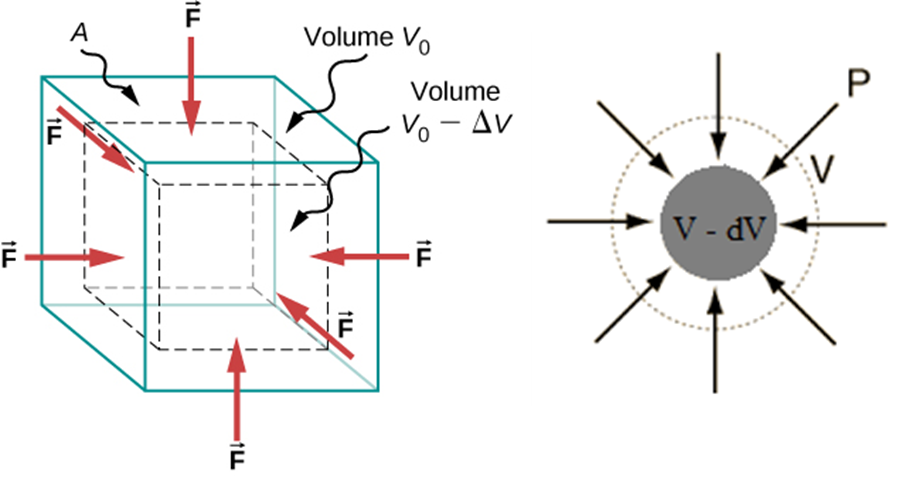
In the case of hydraulic stress, the force applied is perpendicular to every point on the surface due to which a change in volume
Strain
When a deforming force acts on a body, the body undergoes a change in its shape and size. The ratio of the change in configuration of the body to the original configuration is called strain.
Strain = ![]()
If there is a change in any of the configuration of the body due to applied deforming force on it, then the body is said to be stained or deformed.
Since strain is the ratio of two like quantities, it is dimensionless and has no units.
According to a change in configuration, change in length, volume, or shape of the body, the strain can be classified as
- Longitudinal strain
- Volumetric strain
- Shear strain
- Longitudinal strain: It is defined as the change in length per unit of original length when the body is deformed by external forces.
![]()
- Volumetric strain: It is defined as the change in volume per unit of original volume when the body is deformed by external forces.

- Shear strain: It is the deforming forces that produce a change in the shape of the body, then the strain is called shear strain. It is defined as the angle in radians through which a plane perpendicular to the fixed surface of the cubical body gets turned under the effect of tangential force.
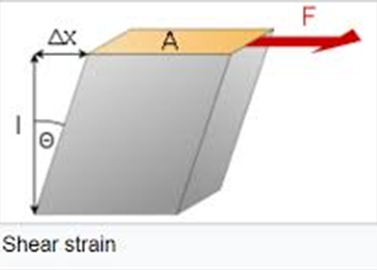
The angle θ is called the angle of shear.
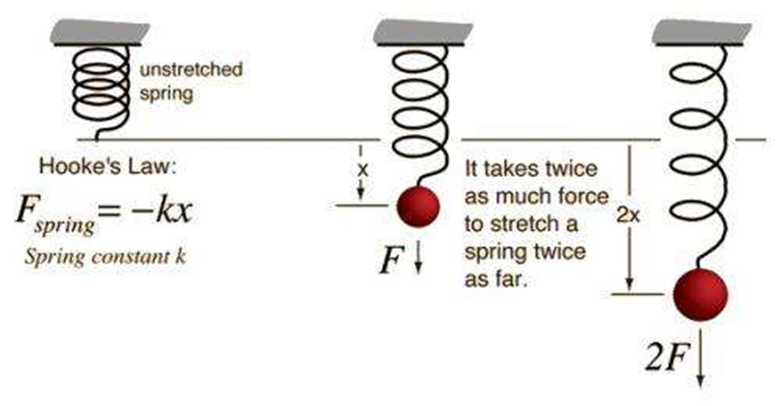
Hooke's Law is a principle of physics that states that the force needed to extend or compress a spring by some distance is proportional to that distance. The law is named after 17th-century British physicist Robert Hooke, who sought to demonstrate the relationship between the forces applied to a spring and its elasticity.
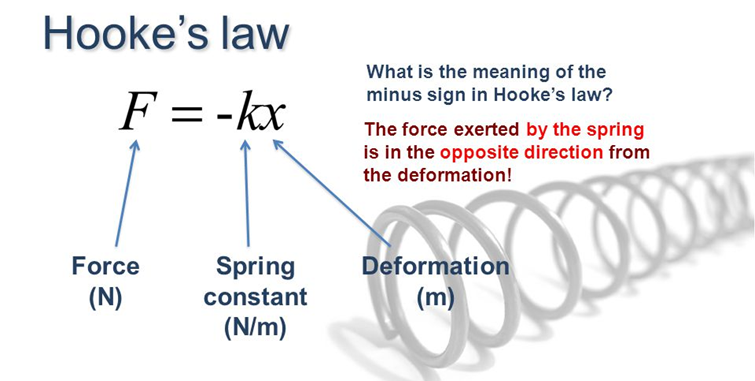
Hooke’s law states that the extension produced in the wire is directly proportional to the load applied within the defined limit of elasticity.
Extension produced α load applied
Later on, it was found that this law is applicable to all types of deformation such as compression, bending, twisting etc. and thus a modified form of Hooke’s law was given as,
Within the elastic limit, the stress developed is directly proportional to the strain produced in a body.
Or,
For example: when we apply force on a spring, it gets compressed/ elongated and a restoring force is produced opposite to its displacement.
- Hooke’s law is valid only in the linear portion of the stress-strain curve. This law is not valid for large values of strains.
- Modulus of elasticity ‘E’ depends on the nature of the material of the body and is independent of its dimensions like length, area, volume etc.
Stress-strain Relationship
When a wire is stretched by an applied force, then a typical graph is obtained (especially in the case of metals) as shown below.
- OA is a straight line showing that the material follows Hooke’s law. Point A is called the proportionality limit (
- Up to B, if the load is removed, the material will regain its original shape. So material shows elastic behavior up to point B.
Thus curve OB represents the elastic curve. Point B is called yield point and corresponding stress is called yield strength
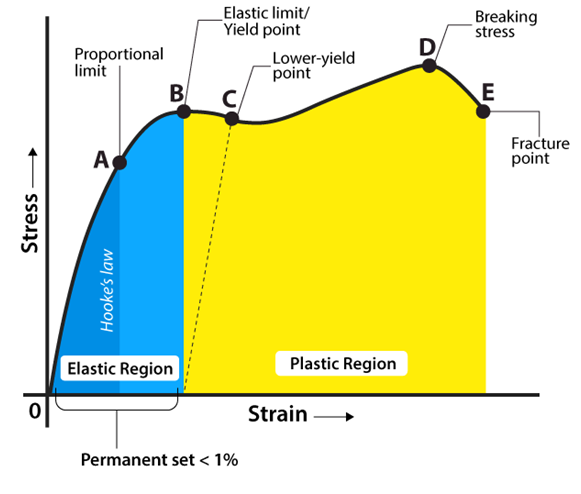
- Beyond point B, the strain increases rapidly even for a small change in stress or load. And when the load is removed between points B and D, the body does not regain its original dimensions. So, even when the stress (or load) is zero, there remains some strain on the material. The deformation is called plastic deformation.
- Point D on the graph represents the ultimate tensile strength (
Modulus of Elasticity
The modulus of elasticity or coefficient of elasticity of a body is defined as the ratio of stress to the corresponding strain within the elastic limit.
S.I. unit of Modulus of Elasticity is
There are three types of modulus of elasticity:
- Young’s Modulus ( Y)
- Bulk modulus ( B)
- Modulus of rigidity or shear modulus (G)
1. Young’s Modulus
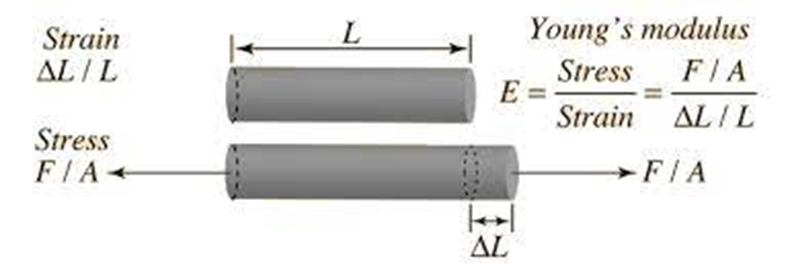
Within the elastic limit, the ratio of longitudinal stress to the longitudinal strain is called Young’s Modulus of the material of the wire.
Young's modulus (Y) is a property of the material that tells us how easy it can stretch and deform and is defined as the ratio of tensile stress (σ) to tensile strain (ε). Where stress is the amount of force applied per unit area (σ = F/A) and strain is extension per unit length (ε = dl/l).
![]() ,
,
Where F= load, A= area of cross-section, L= Length of rod
For metals Young’s moduli are large. Therefore, these materials require a large force to produce a small change in length.
Steel has a larger value of young’s modulus than copper, brass and aluminum. Steel is more elastic than copper, brass and aluminum. It is for this reason that steel is preferred in heavy-duty machines and in structural designs. Wood, bone, concrete and glass have rather small Young’s moduli.
If the extension is produced by a load of mass ‘m’ then, F= mg.
Here the wire has a circular cross-section. So area of cross-section
So the formula for young’s modulus can be written as
![]()
2. Bulk Modulus of Elasticity
Within the elastic limit, the ratio of normal stress to the volumetric strain is called the bulk modulus of elasticity.
![]()
So,
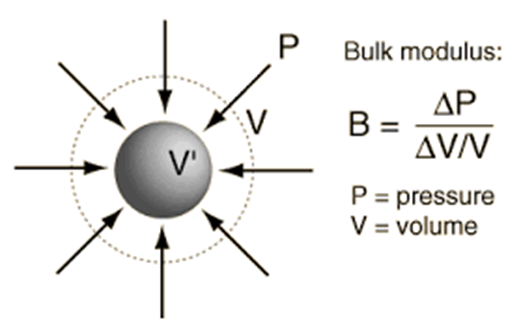
What is meant by bulk modulus?
Sometimes referred to as incompressibility, the bulk modulus is a measure of the ability of a substance to withstand changes in volume when under compression on all sides. It is equal to the quotient of the applied pressure divided by the relative deformation.
The units for the bulk modulus are Pascal’s (Pa) or newtons per square meter (N/m2) in the metric system.
Compressibility: The reciprocal of the bulk modulus of a material is called its compressibility.
Bulk modulus is used to measure how incompressible a solid is. Besides, the more the value of B for a material, the higher is its nature to be incompressible. For example, the value of B for steel is
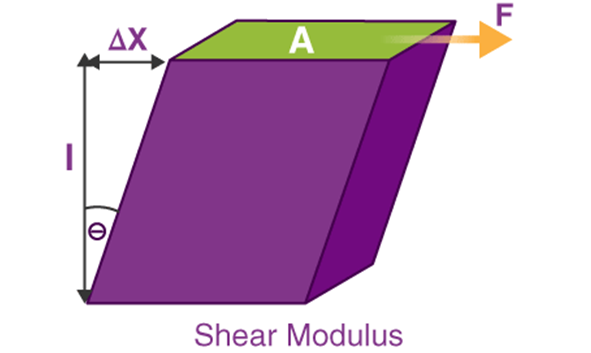
3. Modulus of rigidity or shear modulus
Within the elastic limit, the ratio of tangential stress (shear stress) to shear strain is called the modulus of rigidity of shear modulus. It is denoted by G or η.
To measure the stiffness of materials, the shear modulus is one of many quantities. The deformation of a solid is concerned with the shear modulus when it experiences a force parallel to one of its surfaces while its opposite face experiences an opposing force.
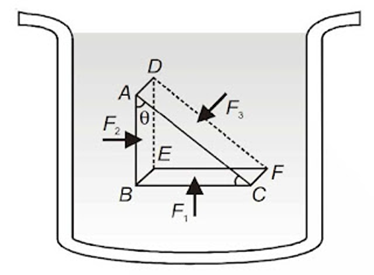
Let us consider a cube whose lower face is fixed and a tangent force F acts on the upper face whose area is A, as shown in the figure.
Let the vertical sides of the cube shit through an angle θ, called shear strain
Therefore, the Modulus of rigidity is given by ![]()
According to the diagram,
![]()
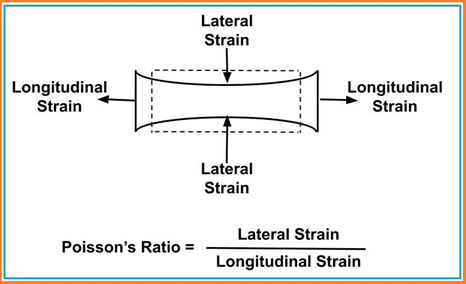
Poisson’s Ratio
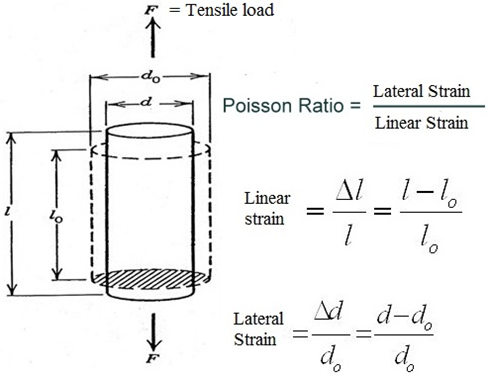
When a material is stretched in one direction, it tends to compress in the direction perpendicular to that of force application and vice versa. The measure of this phenomenon is given in terms of Poisson’s ratio. For example, a rubber band tends to become thinner when stretched.
What is the position ratio?
Poisson's ratio is “the ratio of transverse contraction strain to longitudinal extension strain in the direction of the stretching force.” Here, Compressive deformation is considered negative. Tensile deformation is considered positive.
Therefore Poisson’s ratio σ is given by,
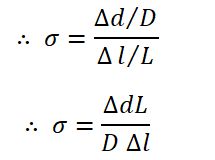
Poisson's ratio is the ratio of lateral strain to longitudinal strain. It has no units.
Relation between various modulus of Elasticity
The elastic moduli of a material, like Young’s Modulus, Bulk Modulus, and Shear Modulus are specific forms of Hooke’s law, which states that for an
elastic material, the strain experienced by the corresponding stress applied is proportional to that stress. Thus, we can write the relation between elastic constants by the following equation:
Where,
- G is the Shear Modulus
- Y is the Young’s Modulus
- B is the Bulk Modulus
- σ is Poisson’s Ratio
We can derive the elastic constant’s relation by combining the mathematical expressions relating to terms individually.
- Young modulus can be expressed using Bulk modulus and Poisson’s ratio as –
- Similarly, Young’s modulus can also be expressed using rigidity modulus and Poisson’s ratio as-
- Combining the above two-equation and solving them to eliminate Poisson’s ratio we can get a relation between Young’s modulus and bulk modulus B and modulus of rigidity as -
A fun thing to try: Virtual lab
Below is the link to the simulation of Hooke’s law
In this simulation, we have three parts: Intro, systems, and energy
- Intro: In the Intro, we have a spring whose one end is fixed and the other end can be pulled.
- We can fix the spring constant of the spring and then by changing the applied force we can see how much displacement it is producing in the spring.
- We can then change the spring constant of the spring and do the same process again.
- We will come to know that it is easier to stretch a spring with lower spring constant.
- System: In the system we have the option of parallel combination of spring and a series combination of spring. We can choose any of them.
- We can then fix the spring constant of the springs and apply force and see how the displacement is changing with the applied force.
- Now we can change the spring constant and do the same process.
- This should be done with both combinations of spring: Series and parallel.
- Energy: In this part we can see the value of potential energy of the spring.
- We can fix the spring constant of the spring and then change the displacement and see how the potential energy is varying.
- We can also fix the displacement and vary spring constant and see how the potential energy of the spring is changing.
1. temperature and First law of thermodynamics
Introduction
Thermodynamics is that branch of physics which deals with concepts of heat and temperature and their relation to energy and work.
We can also consider it as a macroscopic science which deals with bulk systems and tells us about the system as a whole.
The foundation of thermodynamics is the conservation of energy and the fact that the heat flows spontaneously from hot to the cold body and not the other way around. The study of heat and its transformation to mechanical energy is called thermodynamics. It comes from a Greek word meaning “Movement of heat”.
A collection of large numbers of molecules of matter (solid, liquid or gas) that are arranged in a manner such that these possess particular values of pressure, volume and temperature form a thermodynamic system.
The distinction between mechanics and thermodynamics is worth bearing in mind. In mechanics, our interest is in the motion of particles or bodies under the action of forces and torques. Thermodynamics is not concerned with the motion of the system as a whole. It is concerned with the internal macroscopic state of the body.
In this chapter, we will learn about the laws of thermodynamics which describes the system in terms of macroscopic variables, and reversible and irreversible processes. Finally, we will also learn on what principle heat engines, refrigerators and Carnot engines work.
Thermal equilibrium
Equilibrium in mechanics means that the net external force and torque on a system are zero. The term ‘equilibrium’ in thermodynamics appears in a different context: we say the state of a system is an equilibrium state if the macroscopic variables that characterize the system do not change in time.
For example, a gas inside a closed rigid container, completely insulated from its surroundings, with fixed values of pressure, volume, temperature, mass and composition that do not change with time, is in a state of thermodynamic equilibrium
Consider two bodies at different temperatures one is at 30 C and another at 60 C then the heat will flow from the body at a higher temperature to the body at a lower temperature. Heat will flow till both bodies acquire the same temperature. This state when there is no heat flow between two bodies when they acquire the same temperature is known as thermal equilibrium.
Types of Equilibrium
Thermal Equilibrium: - Two systems are said to be in thermal equilibrium with each other if the temperatures of both systems do not change with time.
Chemical Equilibrium: - Two systems are said to be in chemical equilibrium with each other if the composition of the system does not change over time.
Mechanical Equilibrium: - Two systems are said to be in mechanical equilibrium with each other if the pressure of the system doesn’t change with time.
A system is said to be in Thermodynamic equilibrium when all of its macroscopic variables are constant.
System and surrounding
System: - System is defined as any part of the universe enclosed by some boundary through which exchange of heat or energy takes place.
Surroundings: - Any part of the universe which is not a system. Systems and surroundings constitute the Universe.
For example: -
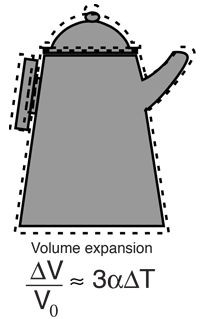
- If we consider hot coffee in a kettle then the kettle is the system and everything else is the surroundings.


- A cup of hot coffee after some time becomes cold due to the exchange of heat between the system and surroundings.
Types of system
A thermodynamic system is a specific portion of matter with a definite boundary on which our attention is focused. There are three types of systems:
- Isolated System – An isolated system cannot exchange energy and mass with its surroundings. The universe is considered an isolated system. For example a thermos flask
- Closed System – Across the boundary of the closed system, the transfer of energy takes place but the transfer of mass doesn’t take place.
For example A balloon filled with gas, A pot with a lid etc.

- Open System – In an open system, the mass and energy both may be transferred between the system and surroundings.

For Example: - Water boils in a pan without lid, a cup of coffee etc.
Types of walls
Adiabatic wall: - It is an insulating wall that doesn’t allow heat to flow from one system to another. This means the temperature of both the systems won’t change with time.
Consider 2 systems A and B as shown in the figure, which are separated by adiabatic walls. Let the pressure and volume of A be (P1, V1) and (P2, V2).
Both these systems are also separated from the surroundings by an adiabatic wall which means there is no flow of heat between A and surroundings and also B and surroundings.
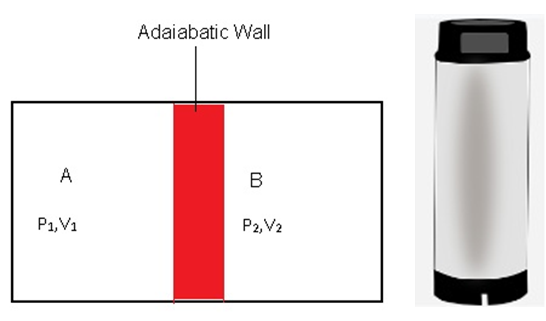
For example: - Thermos Flask. In which tea or coffee remains hot for a long time as it is made of insulating walls due to which there is no heat flow between tea and surroundings.
Diathermic (conducting) Wall: - It is a conducting wall that allows the flow of heat between any 2 systems.
- Consider two systems A and B which are separated by a conducting wall. System A is at higher temperature T1, pressure P1 and volume V1 and System B is at lower temperature T2, pressure P2 and volume V2.
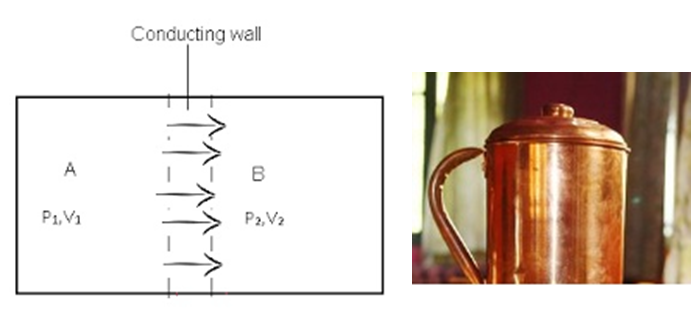
- There is flow of heat from a system at a higher temperature to the system at a lower temperature till the systems reach thermal equilibrium.
For Example: - A vessel made up of metals like copper or aluminum has diathermic / conducting walls
Zeroth law of thermodynamics: Temperature
Zeroth law of thermodynamics states that when two systems are in thermal equilibrium through a third system separately then they are in thermal equilibrium with each other also.
Forge: - Consider two systems A and B which are separated by an adiabatic wall. Heat flow happens between systems A and C, and between B and C, due to which all 3 systems attain thermal equilibrium.
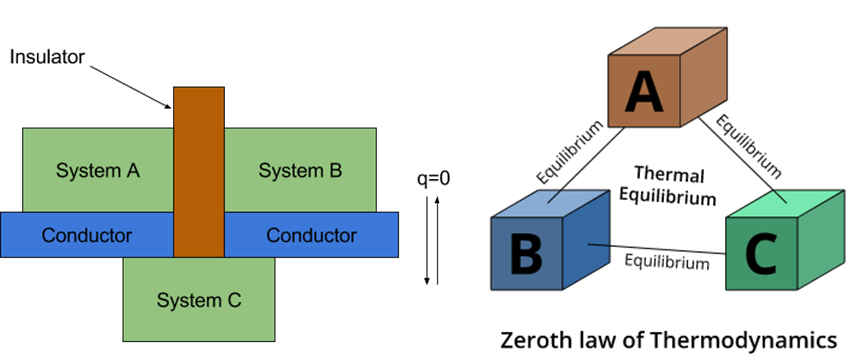
Systems A and B are in thermal equilibrium with C. Then they will be in equilibrium with each other also.
- Zeroth's Law of Thermodynamics suggested that there should be some physical quantity that should have the same value for the system to be in thermal equilibrium.
- This physical quantity that determines whether a system is in equilibrium or not is Temperature.
- Temperature is the quantity that determines whether the system is in thermal equilibrium with the neighboring system.
- When the temperature becomes equal then the flow of heat stops.
Thermodynamic state variable
Thermodynamic state variables are the macroscopic quantities which determine the thermodynamic equilibrium state of a system. These macroscopic quantities are known as thermodynamics state variables.
- As they determine the state of the system, that is pressure, volume and temperature, at one particular time they are known as thermodynamic state variables. Pressures (P), Volume (V), Temperature (T), mass (m), and Internal energy (U) are the thermodynamic state variables.
- These variables can tell us the position or the condition of any gas at that particular time.
- A system not in equilibrium cannot be described by state variables. It means the macroscopic variables are changing with time and they are not constant.
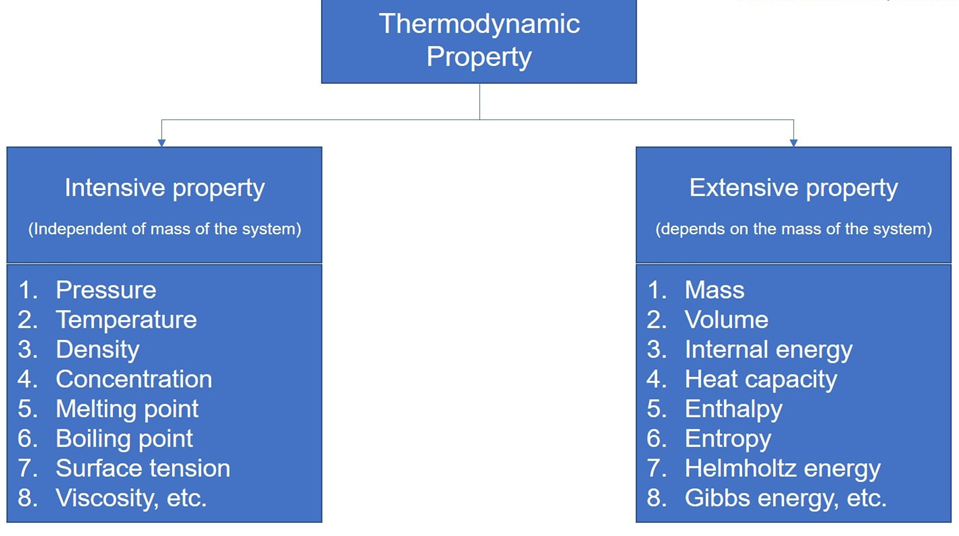
Types of thermodynamic state variables:-
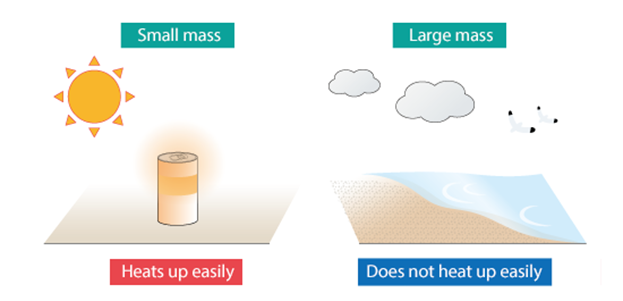
- Extensive variables: - They indicate the size of the system, which means extensive variables are those that depend on the mass of the system or the number of particles in the system. Example: volume, mass, internal energy. If we consider a system whose mass is greater than the size of that system is greater. All these depend on the size of the system.
- Intensive variables: -A quantity in a macroscopic system that has a well-defined value at every point inside the system and that remains (nearly) constant when the size of the system is increased. Examples of intensive variables are pressure, temperature, density, specific heat capacity at constant volume, and viscosity.
In the figure given below various examples of extensive and intensive variables are given.
Internal Energy
It is defined as the sum of kinetic energies and potential energies of the molecules constituting the system as a whole and not of individual molecules. It is a macroscopic variable of the system.
It is denoted by U. It is an extensive thermodynamic state variable as it depends on the size of the system.
It only depends on the state of the system at that particular time and does not depend on how the system has reached that state.
There are two modes of changing the internal energy of a system
- Heat
- Work
Consider again, for simplicity, the system to be a certain mass of gas contained in a cylinder with a movable piston. There are two ways to change the internal energy of the system.
By Heat: One way is to put the cylinder in contact with a body at a higher temperature than that of the gas. The temperature difference will cause a flow of energy (heat) from the hotter body to the gas, thus increasing the internal energy of the gas.
By Work: The other way is to push the piston down i.e. to do work on the system, which again results in increasing the internal energy of the gas.
Both these things could happen in the reverse direction. With surroundings at a lower temperature, heat would flow from the gas to the surroundings. Likewise, the gas could push the piston up and do work on the surroundings.
Few things to be remembered:
The notion of heat should be carefully distinguished from the notion of internal energy. Heat is certainly energy, but it is the energy in transit. The state of a thermodynamic system is characterized by its internal energy, not heat.
A statement like ‘a gas in a given state has a certain amount of heat’ is as meaningless as the statement that ‘a gas in a given state has a certain amount of work’. In contrast, a gas in a given state has a certain amount of internal energy is a perfectly meaningful statement. Similarly, the statements ‘a certain amount of heat is supplied to the system’ or ‘a certain amount of work was done by the system’ are perfectly meaningful.
First Law of thermodynamics
According to the first law of thermodynamics: - The change in the internal energy of a closed system is equal to the amount of heat supplied to the system, minus the amount of work done by the system on its surroundings.
Mathematically,
Sign conventions:
- When the heat gets supplied to the system, then ΔQ is taken positive and when heat gets withdrawn from the system, ΔQ is taken negative.
- When a gas expands, work done by the gas is taken positive whereas when a gas contracts, work is taken negatively. Work done is also a path variable so its value also depends on the path chosen.
- ΔU is taken positively when temperature increases while ΔU is taken negative when temperature decreases.
Remember, Heat ΔU and work done is a path variable so it depends on the path chosen. Internal energy is a state variable so its value doesn’t depend on the path followed but only depends on the initial and final state of the system.
Limitations of the first law of thermodynamics
The first law of thermodynamics plays an important role in thermodynamics as it can be applied to know how much work will be obtained by transferring a certain amount of heat energy in a given thermodynamics process. However, the first law of thermodynamics suffers from the following limitations.
- First law of thermodynamics does not indicate the direction of heat transfer.
- First law of thermodynamics does not tell anything about the conditions under which heat can be transformed into work.
- The first law does not indicate why the whole of the heat energy cannot be continuously converted into mechanical work.
1. pressure
Introduction
Liquids and gases can flow and are therefore called fluids. It is this property that distinguishes liquids and gases from solids in a basic way. Fluids are everywhere around us. Earth has an envelope of air and two-thirds of its surface is covered with water. Water is not only necessary for our existence; every mammalian body consists mostly of water. All the processes occurring in living beings including plants are mediated by fluids. Thus understanding the behaviour and properties of fluids is important.
How are fluids different from solids? What is common in liquids and gases?
Solids have fixed volume and shape, liquids have fixed volume but not fixed shape. Gases on the other hand neither have fixed volume nor fixed shape.
Fluids can be defined as any substance which is capable of flowing.
They don’t have any shape of their own. For example:-water which does not have its own shape but it takes the shape of the container in which it is poured. But when we pour water in a tumbler it takes the shape of the tumbler
Fluids are assumed to be the incompressible (i.e., the density of liquid is not dependent on the variation in pressure and remains constant).
Fluids are also assumed to be non-viscous (i.e., the two liquid surfaces in contact are not pressing any tangential force on each other)
Pressure
Pressure is defined as the physical force exerted on an object. The force applied is perpendicular to surface of objects per unit area.
Unit of pressure is Pascals (Pa).
Since P= F/A so pressure is inversely proportional to the Area. If the area would be less, pressure would be more.
For Example:-
Consider a very sharp needle which has a small surface area and consider a pencil whose back is very blunt and has more surface area than the needle.

If we poke a needle in our palm it will hurt as the needle gets pierced inside our skin. Whereas if we poke the blunt side of the pencil into our hand it won’t hurt so much. This is because the area of contact between the palm and the needle is very small therefore the pressure is large.
Whereas the area of contact between the pencil and the palm is more therefore the pressure is less.
Conclusion: Two factors which determine the magnitude of the pressure are:-
- Force – greater the force greater is the pressure and vice-versa.
- Coverage area –greater the area less is the pressure and vice-versa.
Fluid pressure
Normal force exerted by fluid per unit area. This means force is acting perpendicular to the surface of contact.
If a body is submerged in the water, force is exerted by the water perpendicular to the surface of the body. Fluid force exerts itself perpendicularly to any surface in the fluid, no matter the orientation of that surface. Thus, fluid pressure has no intrinsic direction of its own and can be considered as a scalar quantity.
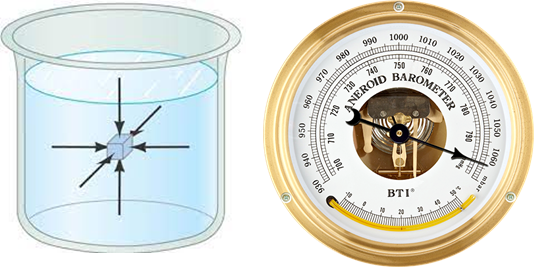
Pressure is a scalar quantity. Because the force here is not a vector quantity but it is the component of force normal to the area.
Dimensional formula for pressure is
Atmospheric pressure: The atmospheric pressure at a point is equal to the weight of the column of air of unit cross-sectional area extending from that point to the top of the atmosphere. Its value is
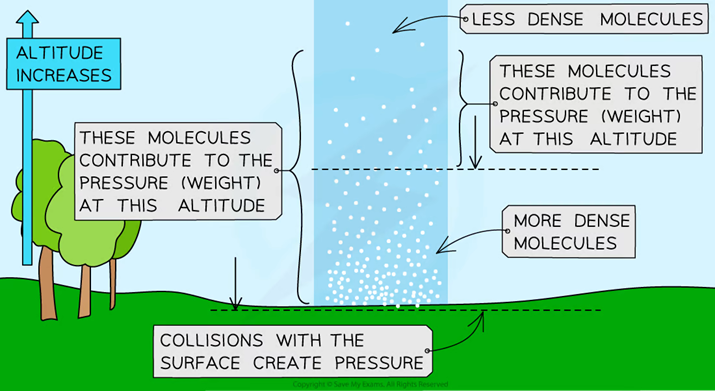
Definition of 1 atm
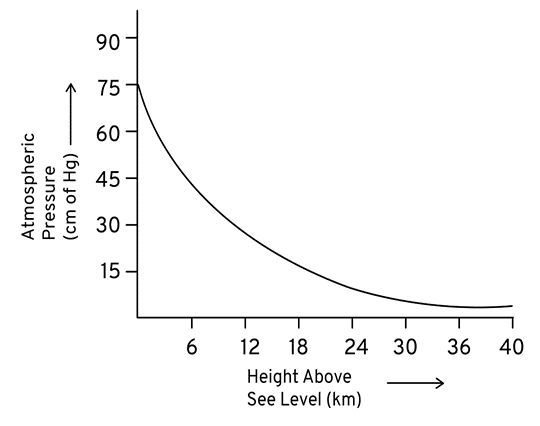
An atmosphere (atm) is a unit of measurement equal to the average air pressure at sea level at a temperature of 15 degrees Celsius (59 degrees Fahrenheit). One atmosphere is 1,013 millibars, or 760 millimetres (29.92 inches) of mercury. Atmospheric pressure drops as altitude increases
Pascal’s law
Pascal’s law states that if the pressure is applied to uniform fluids that are confined, the fluids will then transmit the same pressure in all directions at the same rate.
Pascal’s law holds good only for uniform fluids.
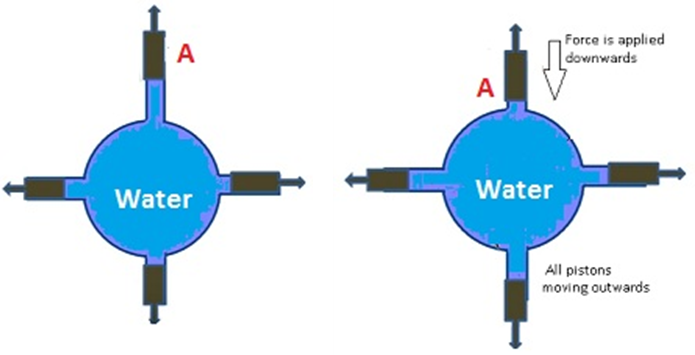
Let us try to understand this with a suitable example. Consider a vessel of circular shape filled with water which has 4 openings and in the entire openings 4 pistons are attached.
- Apply force on the first piston; this piston will move inward and all other pistons will move outwards.
- This happens because when this piston moves inwards the pressure is exerted on the water. Water transmits this pressure in all the directions.
- The other pistons, except A, moves at the same speed which shows water has exerted pressure in all the directions
Conclusion:-
- For a uniform fluid in equilibrium, pressure is the same at all points in a horizontal plane. This means there is no net force acting on the fluid; the pressure is the same at all the points.
![]()
- A fluid moves due to the differences in pressure. That means fluid will always move from a point which is at a higher pressure to the point which is at a lower pressure.
Archimedes principle
Archimedes Principle:
- Consider a body partially or fully dipped in a fluid. The fluid exerts a contact force on this body. The resultant of all these contact forces is termed buoyant force or up thrust.
- F=weight of fluid displaced by the body
- This force is termed buoyant force and it acts vertically upwards (opposite to the weight of the body) through the centre of gravity of the displaced fluid. Mathematically,
F=Vσg
Where V is the volume of displaced liquid and σ is the density of the liquid
- The apparent reduction in weight of body =Up thrust = weight of liquid displaced by the body.
Variation of pressure with depth
Consider a cylindrical object inside a fluid, consider two positions for this object. Fluid is at rest therefore the force along the horizontal direction is zero.
Force along the vertical direction
Consider two positions 1 and 2. Force at position 1 is perpendicular to cross-sectional area
Similarly,
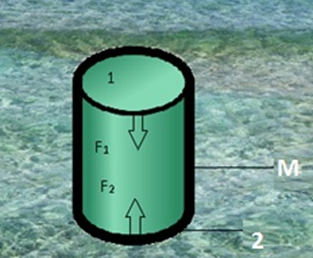
Totalthe force
This net force will be balanced by the weight of the cylinder. Therefore under equilibrium conditions.
Which gives
Therefore the difference in the pressure is dependent on the height of the cylinder.
Consider the top of the cylinder exposed to air therefore P1 = Pa (atmospheric pressure)
Then
Conclusion:
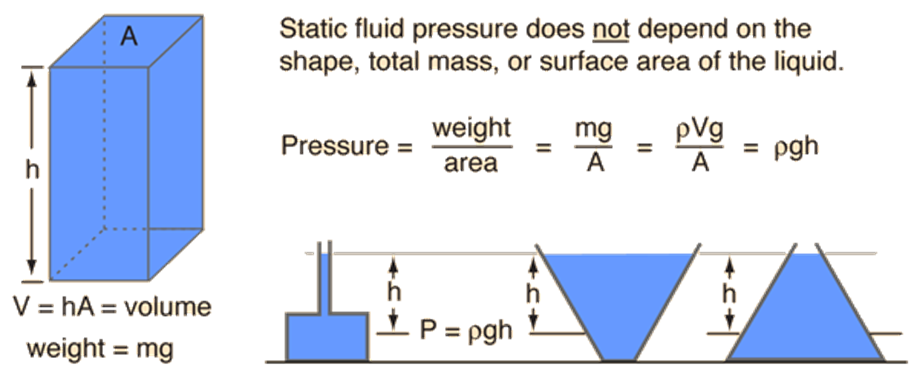
- The pressure P2 , at depth below the surface of a liquid open to the atmosphere is greater than atmospheric pressure by an amount
- The pressure is independent of the cross sectional or base area or the shape of the container.
- Thus, the pressure P, at depth below the surface of a liquid open to the atmosphere, is greater than atmospheric pressure by an amount ρgh. The excess of pressure, P − Pa, at depth h is called a gauge pressure at that point.
Hydrostatic Paradox
Hydrostatic Paradox means: - hydro = water, static =at rest
Paradox means that something is taking place surprisingly.
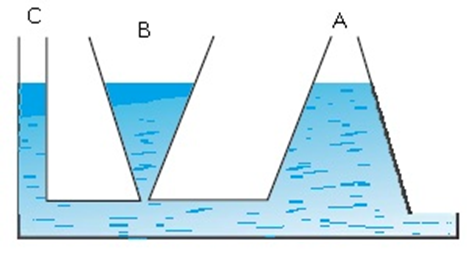
- Consider 3 vessels of very different shapes (like thin rectangular shape, triangular and some filter shape) and we have a source from which water enters into these 3 vessels.
- Water enters through the horizontal base which is the base of these 3 vessels. We observe that the level of water in all the 3 vessels is the same irrespective of their different shapes.
- This is because pressure at some point at the base of these 3 vessels is the same.
- The water will rise in all these 3 vessels till the pressure at the top is same as the pressure at the bottom.
- As pressure is dependent only on height therefore in all the 3 vessels the height reached by the water is the same irrespective of difference in their shapes.
This experiment is known as Hydrostatic Paradox.
Applications: Pascal’s law for transmission of fluid pressure
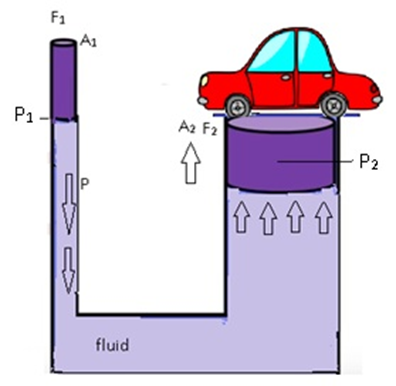
Hydraulic lift:-
Hydraulic lift is a lift which makes use of fluid. For example: Hydraulic lifts that are used in car service stations to lift the cars.
Principle: -
- Inside a hydraulic lift there are 2 platforms, one has a smaller area and the other one has a larger area. It is a tube-like structure which is filled with uniform fluid.
- There are 2 pistons (P1 and P2) which are attached at both the ends of the tube. Cross-sectional area of piston P1 is A1 and piston P2 is A2.
- If we apply force F1 on P1, pressure gets exerted and according to Pascal’s law pressure gets transmitted in all the directions and same pressure gets exerted on the other end. As a result the Piston P2 moves upwards.
Advantage of using hydraulic lift is that by applying small force on the small area we are able to generate a larger force.
Since by Pascal’s law ![]()
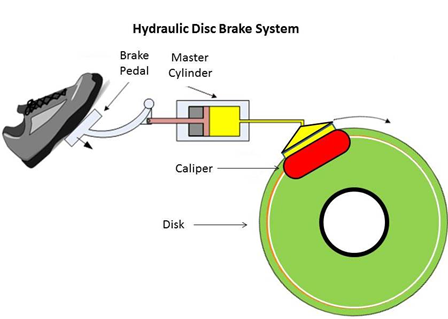
Hydraulic Brakes
- Hydraulic brakes work on the principle of Pascal’s law.
- According to this law whenever pressure is applied on fluid it travels uniformly in all directions.
- Therefore when we apply force on a small piston, the pressure gets created which is transmitted through the fluid to a larger piston. As a result of this larger force, uniform braking is applied on all four wheels.
- As braking force is generated due to hydraulic pressure, they are known as hydraulic brakes.
- Liquids are used instead of gas as liquids are incompressible.
Effect of gravity on fluid pressure
We can start by stating the relationship between gravity and fluid pressure. We can define both of the terms. We can also write down the formula to find the fluid pressure and see if it is related to gravity. Gravity is a force existing between bodies.
The formula to find the fluid pressure is given by the formula,
P=ρgh
Where ρ is the density of the fluid, g is the acceleration due to gravity and h is the depth of the fluid level.
Fluid pressure is the pressure at a point within a fluid arising due to the weight of the fluid. Gravity is the universal force of attraction acting between all matters.
Therefore, according to the formula
A fun thing to do: Virtual lab
Below is the link of the simulation of under pressure
Under pressure, this simulation is to understand the concept of pressure. It will help us understand how pressure varies with depth for different fluids.
What can we do in this simulation?
- We can choose the density of the liquid and can fill the liquid up to the height we want to fill it.
- We can also change the value of gravity and using the meter to measure pressure we can get the value of pressure in terms of Metric unit (Pa) and other units like ‘atm’. We just need to drag the meter and place it to the point where we want to measure the pressure.
- We can also on /off the atmospheric pressure in this simulation to see its effects.
1. heat and thermal expansion
Introduction
In this chapter, we will study some of the thermal properties of matter.
This topic discusses various thermal phenomena and how a matter behaves when subjected to the flow of thermal energy. We are specifically concerned in
- Thermal expansion
- Heat and calorimetry
- Transfer of heat
We all have common-sense notions of heat and temperature. Temperature is a measure of ‘hotness’ of a body. A kettle with boiling water is hotter than a box containing ice. In physics, we need to define the notion of heat, temperature, etc., more carefully.
When the body is heated, various changes take place. It could expand, it can become hotter, it can change phase etc. Temperature is a measure of the hotness of a body. When water boils or freezes, its temperature does not change during these processes even though a great amount of heat is flowing into or out of it.
You might have noticed that you feel hotter on a sunny afternoon as compared to a windy night. This is because of the difference in temperatures. Temperature is very high in the afternoon as compared to night. This chapter basically gives us the information about thermal properties of matter where we will study about the properties of different substances by virtue of heat/heat transfer.
Temperature and heat
Temperature is the relative measure or indication of the hotness and coldness of a body. A hot cooker is said to have higher temperatures and ice cubes to have lower temperature. An object at a higher temperature is said to be hotter than the one at a lower temperature. The S.I unit of Temperature is Kelvin (K).
A cup of hot soup and cold ice cream.

Heat
When we put a cold spoon into a cup of hot tea, the spoon warms up and the tea cools down as they were trying to equalize the temperature. Energy transfer that takes place solely because of temperature difference is called heat flow of heat transfer and the energy transferred is called heat. The S.I. unit of heat transfer is expressed in Joule (J).

Measurement of Temperature
A physical property that changes with temperature is called thermometric property. When a thermometer is put in contact with a hot body, the mercury expands, increasing the length of the mercury column, which can be calibrated and later be used to measure temperature.
This was one such example, there are many such which enable us to measure temperature.
There are three scales of measurement of Temperature.
- Celsius scale
- Fahrenheit scale
- Kelvin scale
The standard scale of measurement of temperature is Kelvin scale.
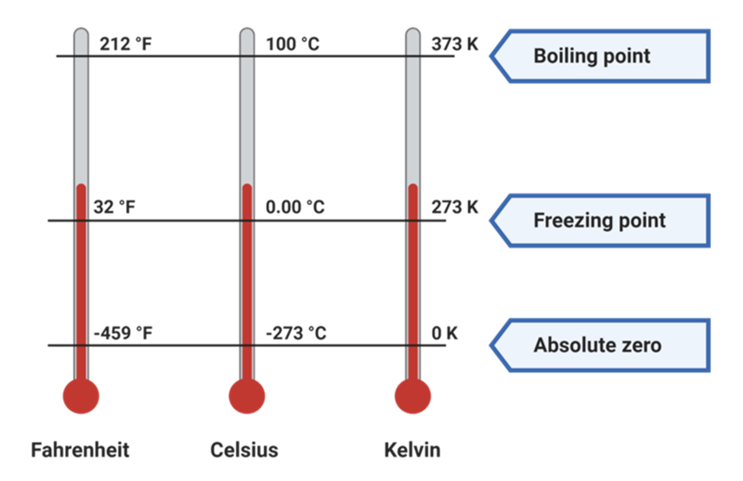
- Celsius scale: It defines the ice point at 0 degree Celsius and the steam point temperature as 100 degree Celsius. The space between 0 and 100 degree Celsius is equally divided into 100 intervals.
- Fahrenheit Scale: It defines the ice-point temperature as 32 F and the steam point is 212 F. The space between 32 F and 212 F is divided into 180 intervals.
- Kelvin scale: Kelvin scale is a scale of measuring temperature, the melting point of ice is taken as 273 K and the boiling point of water at 373 K. The space between these is divided in 100 intervals. This is also known as the absolute scale of temperature as it has only positive values of Temperature. This scale has been adopted as the standard scale of measuring Temperature.
To convert a temperature from one scale to the other, we must take into account the fact that the zero temperatures of the two scales are not the same. Below is the relation between different scales of temperature.
![]()
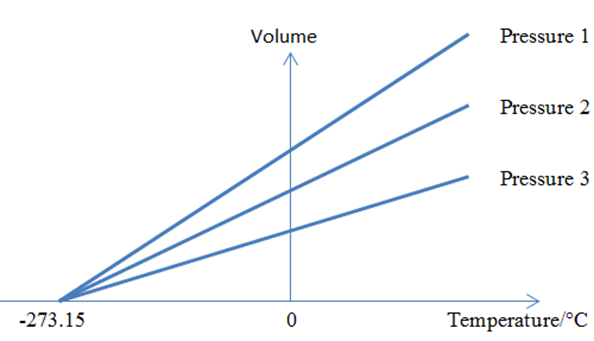
Ideal gas equations and absolute Temperature
We have Liquid-in-glass thermometers like mercury thermometers, these thermometers do not give accurate readings for temperature other than the ice point and boiling point because of differing expansion properties of liquid.
A thermometer that uses a gas however gives the same readings regardless of which gas is used. This is considered to be a more accurate thermometer than liquid-in-glass thermometer. Experiments show that all gases at low densities exhibit the same expansion behavior. The variables that describe the behavior of a gas of given quantity (mass) are
- Pressure
- Temperature
- Volume
There are some laws that are followed by gases of low density. These laws are:-
- Charles’s law: This law states that at constant pressure, volume and temperature of the gas are directly proportional for a fixed quantity of gases.
- Boyle’s law: This law states that at a constant temperature, the volume of the gas is inversely proportional to the pressure of gas for a fixed quantity of gases.
- Avogadro law: At constant Pressure and Temperature, equal volume of gases contains equal number of molecules of gas. In other words, we can say that at constant P and T, the Volume of the gas is directly proportional to the number of molecules of gas.
If we combine these three laws we will get
To remove the proportionality sign we add a constant R.
Above equation is called the ideal gas equation and R= constant of proportionality is called the gas constant.
Absolute zero temperature
This point, where all the atoms have been completely stopped relative to each other, is known as "absolute zero" and corresponds to the number zero on the Kelvin temperature scale. An object cannot be cooled below this point because there is no atomic thermal motion left to stop.
Can absolute zero ever be reached?
Physicists acknowledge they can never reach the coldest conceivable temperature, known as absolute zero.
The zero on a Kelvin scale is called the absolute zero. Absolute Temperature is equal to minus 273-degree Celsius or 459.67 degrees Fahrenheit.
Thermal expansion
Thermal expansion is the tendency of matter to change in shape, volume, and area in response to a change in temperature. Temperature is a monotonic function of the average molecular kinetic energy of a substance.
Thermal expansion is caused by heating solids, liquids or gases, which makes the particles move faster or vibrate more (for solids). This means that the particles take up more space and so the substance expands
The amount by which it expands depends on three factors: its original length, the temperature change, and the thermal (heat) properties of the metal itself. Some substances simply expand more easily than others.
Thermal expansion is of three types:
- Linear expansion. The expansion in length is called linear expansion.

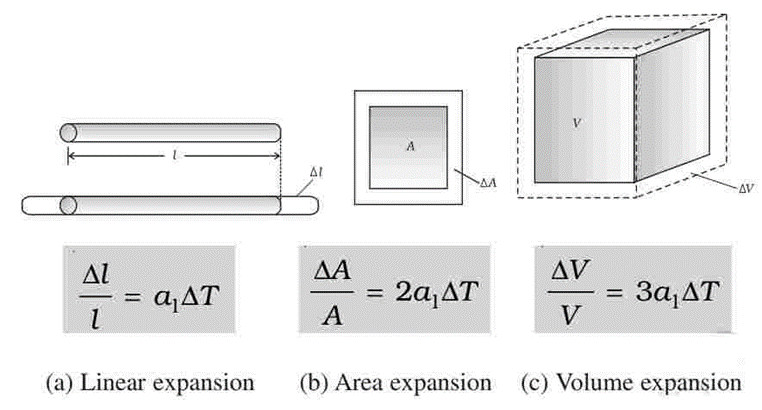
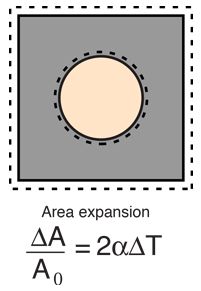
- Area expansion. The expansion in area is called area expansion.
- Volume expansion. The expansion in volume is called volume expansion.
If the coefficient of linear expansion is denoted by α
Coefficient of area expansion is denoted by β
Coefficient of volume expansion is denoted by γ
The relation between α, β and γ is stated as
Anomalous behavior of water
Water shows some exceptional behavior that is when it is heated at 0°C, it contracts instead of expanding and it happens till it reaches 4 °C. The volume of a given amount of water is minimum at 4 °C therefore its density is maximum (Refer the Fig). After 4 °C water starts expanding. Below 4 °C, the volume increases, and therefore the density decreases. This means water has a maximum density at 4 °C.
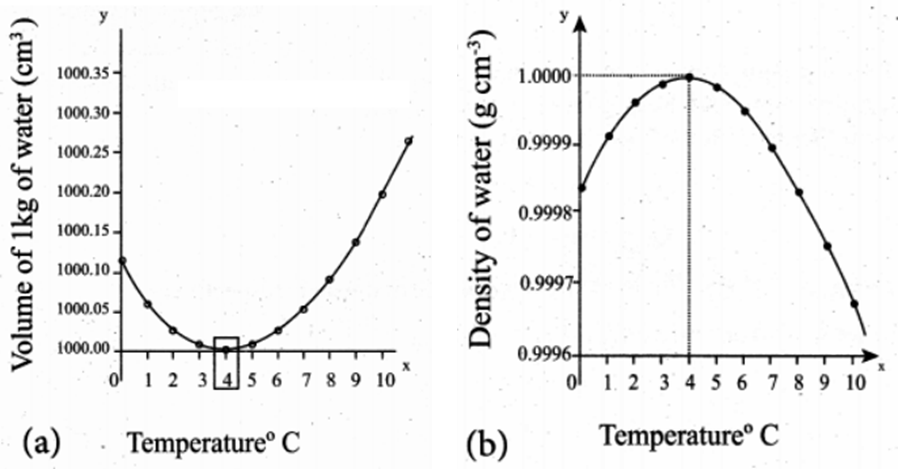
Density of water is maximum and the volume of water is minimum at 4 degree Celsius. This is anomalous behavior of water. Because of this property of water in lakes and ponds freeze only at the top layer and at the bottom it does not, but if the water freezes at the bottom also then animal and plant life would not be possible.
The anomalous behavior of water, sometimes called the density anomaly, is due to strong intermolecular attractions between water molecules called hydrogen bonds. The large electronegativity difference between oxygen and hydrogen causes the hydrogen-oxygen bonds to be polar.
Specific heat capacity
Specific heat, the quantity of heat required to raise the temperature of one gram of a substance by one Celsius degree. The units of specific heat are usually calories or joules per gram per Celsius degree. For example, the specific heat of water is 1 calorie (or 4.186 joules) per gram per Celsius degree.
But let's try to understand the specific heat in detail.
Suppose you have 100 g of water in a vessel at 20 C temperature and you put that vessel on top of a stove (source of heat). Place the thermometer inside it and hold a stopwatch. The heat from the stove will heat up the water and will raise its temperature that can be seen on the thermometer.
- First note the time for increasing the temperature of the water from 20 degrees Celsius to 40 degrees Celsius (rise of 20 C).
- Now you have water at 40 C, now again note the time for increasing the temperature of water upto 60 C (a rise of 40 C). You will notice that it takes double the time if we double the rise of temperature.
From the above experiment, we have the following conclusion.
Heat required to raise the temperature of a substance is proportional to the rise in temperature
Now we will do this experiment again but now with double quality. We now have 200 g of water at 20 C in a vessel which is kept on a stove and keeping all other things the same.
- If we now try to raise the temperature of it upto 40 C and note the time of it. We will notice that you need double the time as we got when we had only 100 g of water. (case 1)
Thus, Heat required to raise the temperature of the substance is proportional to the amount of substance.
Now in the next experiment, we change the liquid from water to oil. We take 100 g of oil at 20 C in a vessel keeping all other things the same.
- If we now try to raise its temperature upto 40 C and note the time of it. You will get the time that is very less as compared to we get in case 1
Thus, the Heat required to raise the temperature of the substance depends on the nature of the substance.
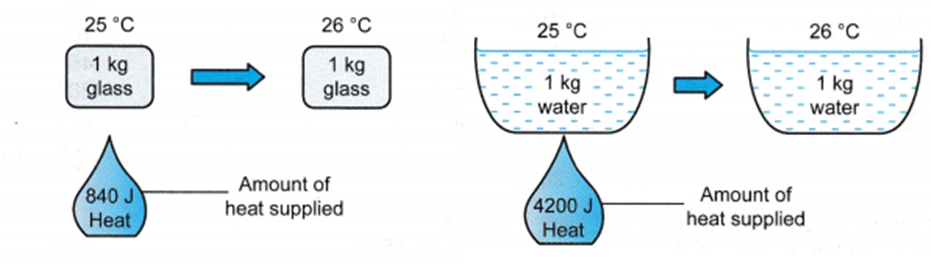
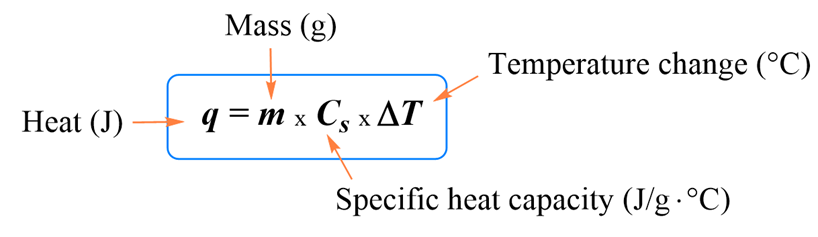
The above series of experiments shows that the quantity of heat required to warm a given substance depends on its mass, m, the change in temperature, ΔT and the nature of the substance. The change in temperature of a substance, when a given quantity of heat is absorbed or rejected by it, is characterized by a quantity called the heat capacity of that substance. Every substance has a fixed value of heat capacity.
Now you will understand the definition of specific heat more clearly.
Specific heat is defined as the amount of heat per unit mass absorbed or rejected by the substance to change its temperature by one.
Molar heat capacity
Heat capacity per mole of the substance is defined as the amount of heat (in moles) absorbed or rejected (instead of mass m in kg) by the substance to change its temperature by one unit.
Here q= heat absorbed in Joules (J), n= number of moles,
Cm = molar specific heat expressed in
Heat transfer can be achieved by keeping either pressure or volume constant, accordingly, we define Cv and Cp. Let us discuss this now.
Molar-specific heat capacity at constant volume (Cv)
If the volume of the gas is maintained during the heat transfer, then the corresponding molar-specific heat capacity is called molar-specific heat capacity at constant volume (Cv).
Water has the highest specific heat of capacity because of which it is used as a coolant in automobile radiators and in hot water bags.
Molar-specific heat capacity at constant pressure (Cp)
If the gas is held under constant pressure during the heat transfer, then the corresponding molar-specific heat capacity is called molar-specific heat capacity at constant pressure (Cp).
A fun thing to do: Virtual lab
Below is the link of the states of matter simulations.
What can we do in this simulation?
- We can choose from the options of gases available ( Neon, Argon, Oxygen and water)
- Then we can choose the state of matter from solid, liquid and gas.
We can then observe the temperature at which these gases are in different states. Like if we choose Water and Gas then the temperature would be around 373K or more, which says that water will be in gaseous form at 373 K and above.
- We can also choose one gas and then raises or lower its temperature and with the help of the motion of its atoms or molecules we can say whether it is in liquid , gaseous or solid states
1. Kinetic theory
Introduction
As all molecules of a gas are in a state of rapid and continuous motion, various properties of a gas like pressure, temperature, energy are explained and the kinetic theory was developed by Scottish physicist James Maxwell and Austrian Physicist Ludwig Boltzmann.
Kinetic theory of gases is based on the molecular picture of matter. It correlates the macroscopic properties (like pressure and temperature) of gases to microscopic properties like speed, kinetic energy of gas molecules.

Kinetic theory explains the behaviour of gases based on the idea that the gas consists of rapidly moving atoms or molecules. This is possible as the interatomic forces, which are short range forces that are important for solids and liquids, can be neglected for gases.
Dalton’s Atomic Theory
- Atomic hypothesis was given by many scientists. According to which everything in this universe is made up of atoms.
- Atoms are little particles that move around in a perpetual order attracting each other when they are little distance apart.
- But if they are forced very close to each other then they rebel.
For example: - Consider a block of gold. It consists of molecules that are constantly moving.
- Dalton’s atomic theory is also referred to as the molecular theory of matter. This theory proves that matter is made up of molecules which in turn are made up of atoms.
According to Gay Lussac’s law - when gases combine chemically to yield another gas, their volumes are in ratios of small integers.
Avogadro’s law states that the equal volumes of all gases at equal temperature and pressure have the same number of molecules.
Conclusion: - All these laws proved the molecular nature of gases.
Dalton’s molecular theory forms the basis of Kinetic theory.
Behaviour of Gases
Gases at low pressures and high temperatures much above that at which they liquefy (or solidify) approximately satisfy a relation between their pressure, temperature and volume:
Where N=number of molecules and kB = Boltzmann Constant and its value never change.
From above two equations we have
Consider there are 2 gases :- (P1, V,1, T1) and (P2, V2, T2) where P, V and T are pressure, volume and temperature respectively.
![]()
This is Avogadro’s hypothesis, that the number of molecules per unit volume is same for all gases at a fixed temperature and pressure
Conclusion: - This relation is satisfied by all gases at low pressure and high temperature.
According to Avogadro’s hypothesis, the number of molecules per unit volume is the same for all gases at a fixed P and T.
Avogadro number is denoted by NA. Where A denotes Avogadro number.
Experimentally it has been found that the mass of 22.4 litres of any gas is equal to molecular weight in grams at standard temperature and pressure.

Perfect Gas Equation
Perfect gas equation is given by PV=μRT,
Where P, V are pressure, volume, T =absolute temperature, μ = number of moles and R =universal gas constant.
R= kBNA where kB = Boltzmann constant and NA = Avogadro’s number
This equation tells about the behaviour of gas in a particular situation. If a gas satisfies this equation then the gas is known as Perfect gas or an ideal gas.
Ideal gas: A gas that satisfies the perfect gas equation exactly at all pressures and temperatures. Ideal gas is a theoretical concept.
- No real gas is truly ideal. A gas which is ideal is known as real gas.
- Real gases approach the ideal gas behaviour for low pressures and high temperatures
Dalton’s Law of partial pressures
Dalton’s law of partial pressure states that the total pressure of a mixture of ideal gases is the sum of partial pressures.
Consider if there are several ideal gases mixed together in a vessel, then the total pressure of that vessel is equal to the sum of partial pressure.
Partial pressure is the pressure exerted by a particular gas if only that gas is present in the vessel.
For example: - Consider if in a vessel there is a mixture of 3 gases, A,B and C.So the partial pressure of A is equal to pressure exerted only by A and considering B and C are not present.
Similarly partial pressure of B is equal to the pressure exerted only by B and considering A and C are not there. And Similarly for C.
According to Dalton’s law the total pressure of mixture is sum of partial pressure of A, partial pressure of B and partial pressure of C
Therefore P= P1+P2+---total pressure due to the mixture of gases is equal to the sum of the partial pressure of the gas.

Kinetic Theory of an Ideal Gas
Basis and assumptions of Kinetic Theory: -
- Molecules of gas are in incessant random motion, colliding against one another and with the walls of the container.
- All collisions are elastic. And total Kinetic energy and momentum are conserved. In case of an elastic collision total Kinetic energy and momentum before collision is equal to the total Kinetic energy and momentum after collision.
- The density and the distribution of the molecules is uniform throughout the gas.
- Between two collisions a molecule moves in a straight path with uniform velocity. But when they come closer they experience the intermolecular forces and as a result their velocities change.
- There are no intermolecular forces between the molecules of gas except during collisions.
- There will be no force ,between the molecules. As a result molecules are moving freely as per Newton's first law of motion.
- At ordinary temperature and pressure the molecular size is very small as compared to intermolecular distance between them.

In the above pictures we can see that molecules moving randomly first and then molecules colliding with each other and change their direct.
The Pressure of an Ideal Gas Based on Kinetic Theory
- Consider a container in the shape of a cube that is filled with an ideal gas. Only one molecule will be considered; the molecule collides with the container's walls and bounces back.
- Let the molecule's velocity while moving be (vx, vy, vz).
- The velocity of the molecule as it bounces back will be (-vx, vy, vz).
- The change in momentum = Pf – Pi where Pf = final momentum and Pi = initial momentum)
- The wall receives this change in momentum as a result of the contact.
- One molecule's momentum delivered to the wall in a collision= 2mvx
However, because there are so many molecules, we must calculate the overall momentum transferred to the wall by them all.
To figure out how many molecules hit the wall, do the following:
- The area of the wall will be ‘A’. Therefore, in time Δt within a distance of
- If n be the number of molecules per unit volume and on average, half of the molecules will hit the wall and half of them will move away from the wall. Therefore,
 will hit the wall.
will hit the wall.
- The total momentum will be:
 .
. - The force exerted on the wall is equal to the rate of change of momentum which will be equal to

- The Pressure on the wall is equal to
 This is true for molecules having velocity vx
This is true for molecules having velocity vx
Note:
- The velocity of all the molecules in the gas will not be the same. The velocities of each will be different.
- As a result, the following equation is valid for pressure due to a group of molecules moving at vx in the x-direction, where n is the number density of that group of molecules.
As a result, the total pressure owing to all such groups may be calculated by adding the contributions due to each molecule. ![]()
- Because the gas is isotropic, the molecules travel at random, meaning that their velocity can be in any direction.

- Therefore, the pressure is equal to
 where
where
Kinetic Interpretation of Temperature
A molecule's average kinetic energy is proportional to the absolute temperature of the gas. It is unaffected by the ideal gas's pressure, volume, or nature.
For the equation: ![]() , by multiplying both sides by V we will get
, by multiplying both sides by V we will get
![]()
Also
After simplifying the above equation ![]()
Here ![]()
‘N’ is the number of molecules in a sample.
EN=12mv2=32kBT ......equation (3)
Therefore, the above equation depicts the average kinetic energy.
So, kinetic energy is directly proportional to the temperature. So, temperature can be identified as a molecular quantity.
Kinetic Theory: Consistent With Ideal Gas Equation and Gas Laws
1. It is consistent with the ideal gas equation:
For the kinetic gas equation: ![]()
For an ideal gas, its internal energy is directly proportional to the temperature. This depicts that internal energy of an ideal gas is only dependent on its temperature, not on pressure or volume.
2. When Kinetic theory is consistent with Dalton’s Law of partial pressure:
The equation for Kinetic theory ![]()
If the mixture of gases is present in the vessel then ![]()
The average Kinetic energy of the molecules of different gases at equilibrium will be equal ![]()
Then the total pressure P is given by
![]()
![]()
So we have Total pressure P of mixture of gases as equal to the sum of partial pressure of individual gases
1. Periodic motion and SHM
Introduction
In our daily life, we come across various kinds of motions. You have already learned about some of them, e.g., rectilinear motion and motion of a projectile. Both these motions are non-repetitive. We have also learned about the uniform circular motion and orbital motion of planets in the solar system. In these cases, the motion is repeated after a certain interval of time, that is, it is a periodic motion.
The study of oscillatory motion is basic to Physics. In musical instruments, like the sitar, guitar and violin. We come across vibrating strings that produce pleasing sounds. The vibration of air molecules makes the propagation of the sound possible.
In this chapter, we will learn about oscillatory motion or oscillations. Any motion which repeats itself at regular intervals of time is known as periodic motion. If a body moves back and forth repeatedly about its mean position then it is said to be in oscillatory motion. For example, The to and fro movement of the pendulum, jumping on a trampoline, a child swinging on a swing.
Periodic and Oscillatory Motion
Periodic Motion: A motion is called periodic motion when it repeats itself after equal intervals of time. The interval of time is called the Time period of periodic motion. Example: The rotational motion of the earth about its axis is periodic motion with a time period of 24 hours.
Oscillatory Motion: An oscillatory or vibratory motion is defined as a periodic and bounded motion about a fixed point. In other words, Oscillations are defined as to and fro motion which repeat itself after regular intervals of time.In oscillations, the frequency of vibrations is comparatively less.
For example, the Motion of the Pendulum of the wall clock, the motion of the bob of a simple pendulum displaced once from its mean position.
Every oscillatory motion is periodic motion, that is every oscillatory motion repeats itself after a fixed interval of time. But every periodic motion is not oscillatory.For e.g.:- Motion of planets around the sun is periodic but is not oscillatory motion.
Simple Harmonic Motion
Simple harmonic motion is the simplest form of oscillatory motion. This motion arises when the force on the oscillating body is directly proportional to its displacement from the mean position, which is also the equilibrium position. Further, at any point in its oscillation, this force is directed towards the mean position.
Simple harmonic motion can be considered as a specific type of oscillatory motion, in which:
- The particle moves in a single dimension
- The particle oscillates to and fro about a fixed mean position (where Fnet=0).
- The net force on the particle always gets directed towards the equilibrium position
- The magnitude of the net force is always proportional to the displacement of the particle from the equilibrium position at that instant.
Equilibrium Position
Oscillating bodies come to rest at their equilibrium positions. When a bob is suspended from rigid support it goes to extreme positions and then comes to its mean position which is also known as equilibrium position.
Equilibrium Position is that position where an object tends to come at rest when no external force is applied.
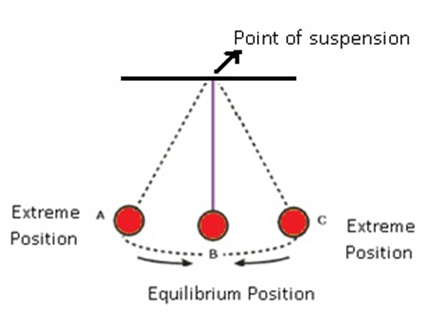
To and fro motion of the pendulum oscillating from its mean position B to its either extreme positions A and C respectively.
Period/Time period (T)
The time is taken by an oscillating body to complete one cycle of oscillation. This means the to and fro motion of the body gets repeated after a fixed interval of time.
It is denoted by T. and the unit is second.
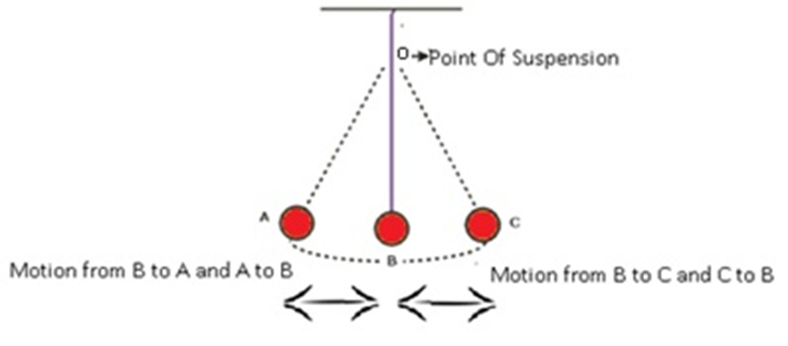
The above image describes the motion of the pendulum, it goes from B to A and then back to B from A. Similarly The motion of pendulum from B to C.
Frequency (f): The number of repetitions in one second of a periodic motion is called Frequency (ν). Its unit is Hertz (Hz). The reciprocal of T gives the number of repetitions that occur per unit of time.
Displacement: We defined the displacement of a particle as the change in its position vector. Displacement in periodic motion can be represented by a function which is periodic which repeats after a fixed interval of time.
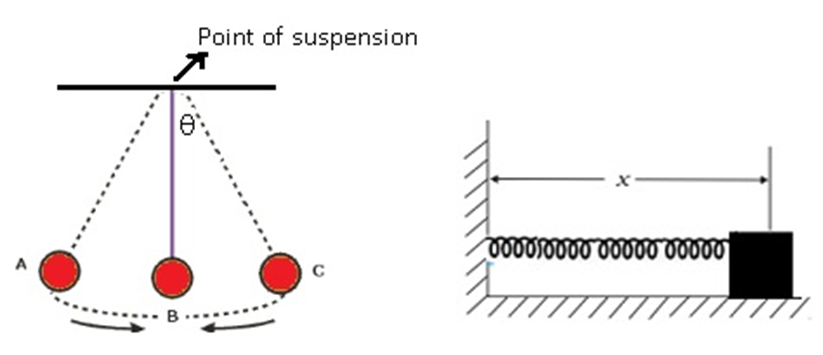
In the above image, we can see that motion of an oscillating simple pendulum can be described in terms of angular displacement θ from the vertical. And In the above right image, we can see that there is a block whose one end is attached to a spring and another is attached to a rigid wall.x is the displacement from the wall.
SIMPLE HARMONIC MOTION
Simple Harmonic Motion (SHM) is a periodic motion in the body that moves to and fro about its mean position. The restoring force on the oscillating body is directly proportional to its displacement and is always directed towards its mean position.

In the above image, we can see that a particle is vibrating to and fro within the limits –A and +A.
Mathematically,
So, acceleration ![]()
where k is known as force constant
However ,In SHM we know that acceleration
This equation is known as the differential equation of S.H.M.
where ω is known as angular frequency here ![]()
The general expression for solution satisfying the equation d
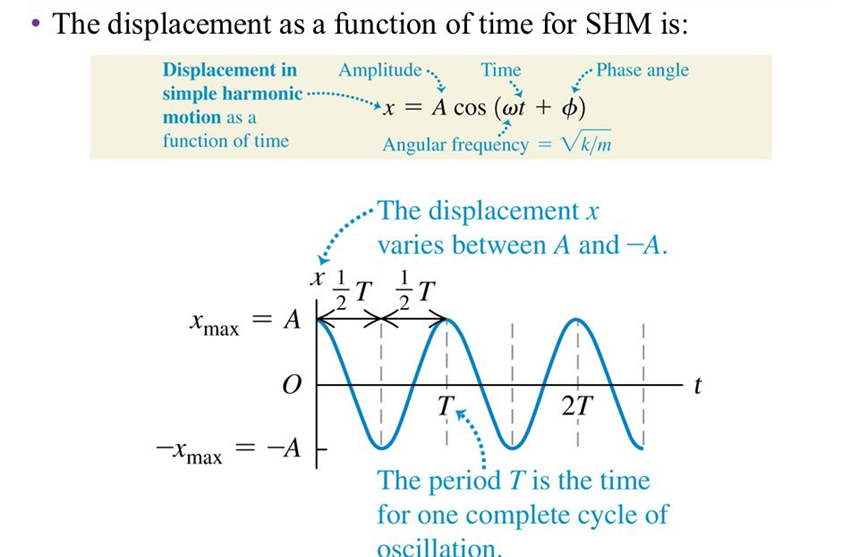
The oscillatory motion is said to be SHM if the displacement x of the particle from origin varies with time t:
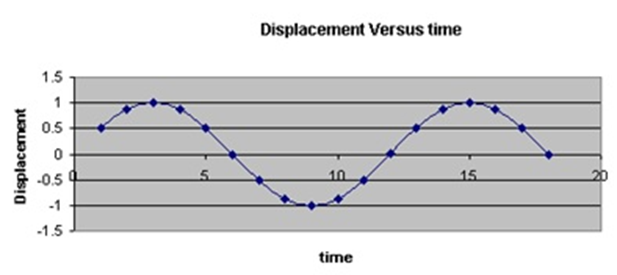
The above graph shows displacement as a continuous function of time.
Now let's consider this x (t) = A cos (ωt + Φ) Where
x (t) : displacement x as a function of time
A= amplitude, It is defined as the magnitude of maximum displacement of the particle from its mean position.
ωt +Φ = phase angle (time-dependent) , ω= angular frequency and Φ = phase constant
SHM is a periodic motion in which displacement is a sinusoidal function of time.
If we plot the graph between displacement versus time we can conclude that displacement is a continuous function of time.
Phase
It is that quantity that determines the state of motion of the particle.
1. Its value is (ωt + Φ)
2. It is dependent on time.
The value of phase at time t=0 is termed as Phase Constant. When the motion of the particle starts it goes to one of the extreme positions at that time phase is considered as 0.
Let x (t) = A cos (ωt) where we are taking (Φ = 0)
1. Mean Position (t= 0)
2. x (0) = A cos (0) = A (cos 0=1)
3. t=T/4, t= T/2, t=3T/4, t=T and t=5T/4
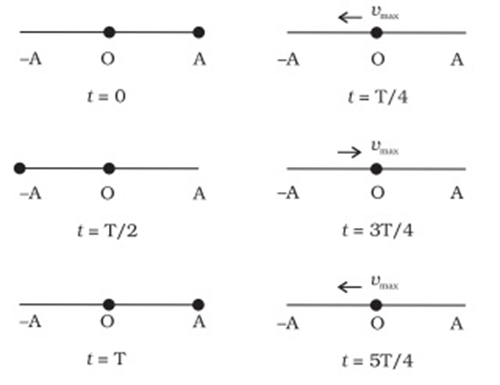
The above figures depict the location of the particle in SHM at different values of t=0, T/4, T/2, 3T/4, T, and 5T/4.The time after which motion repeats is T. The speed is maximum for zero displacements (x=0) and zeroes at the extremes of motion.
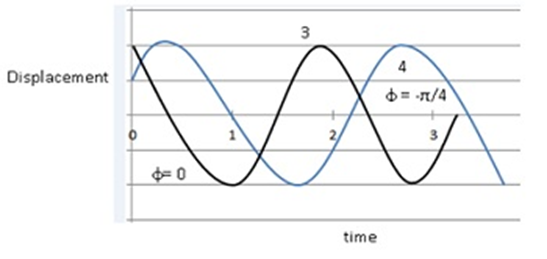
In the above graph the curves (3) and (4) are for φ = 0 and -π/4 respectively but the amplitude is the same for both.
Angular Frequency (ω)
Angular frequency refers to the angular displacement per unit time. It can also be defined as the rate of change of the phase of a sinusoidal waveform (e.g., in oscillations and waves). Angular frequency is larger than frequency f (in cycles per second, also called Hz), by a factor of 2π.
Mathematically
Oscillations due to spring
Consider a block if it is pulled on one side and is released, and then it executes to and fro motion about a mean position.
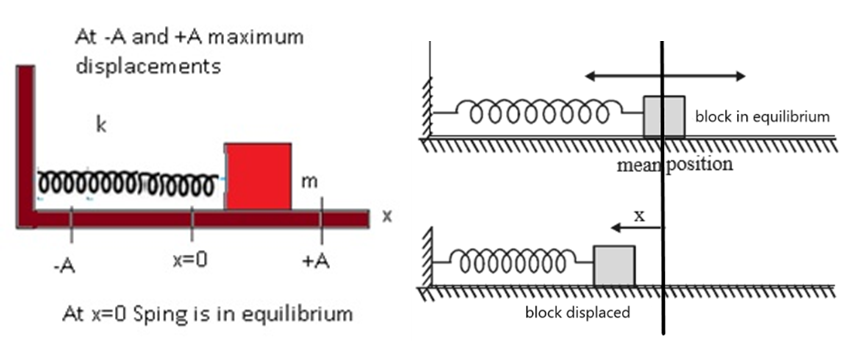
In the above image a block, is on a frictionless surface when pulled or pushed and released, executes simple harmonic motion.
F (x) = –k x (expression for restoring force)
‘K’ is known as spring constant and its value is governed by the elastic properties of the spring.
- The above expression is the same as the force law for SHM and therefore the system executes a simple harmonic motion. Therefore,
- Angular frequency ‘w’ is given by

- The time period of oscillation is
Vertical spring ( loaded spring).
When the spring is suspended vertically from a fixed point and carries the block at its other end as shown, the block will oscillate along the vertical line.
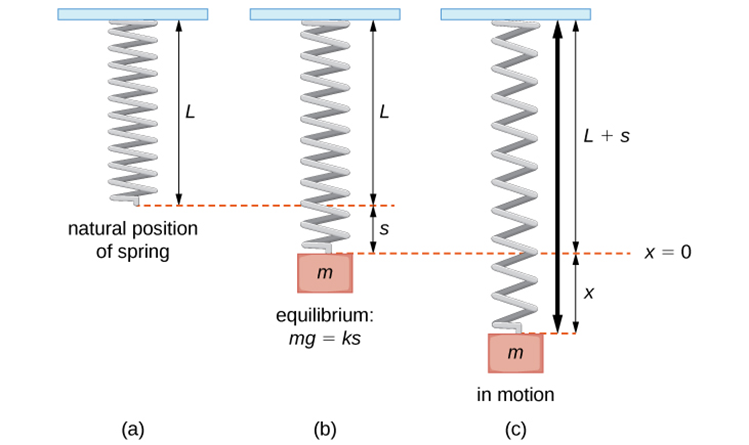
- In first figure we have an unstretched spring of length L
- In the second figure, we load a mass ‘m’ with the spring and it gets stretched by a distance s, this is its equilibrium position when gravity (mg) and restoring force ( ks ) balance each other.
- In the third one we displaced the mass ‘m’ from its equilibrium position by a distance ‘x’. And then the loaded pendulum will start oscillating about its mean/ equilibrium position.
Time period of oscillation ![]() =
= ![]()
Combination of springs:
1. Springs in series:
Consider two springs of force constants K1 and K2 respectively, connected in series as shown. They are equivalent to a single spring of force constant K which is given by ![]()
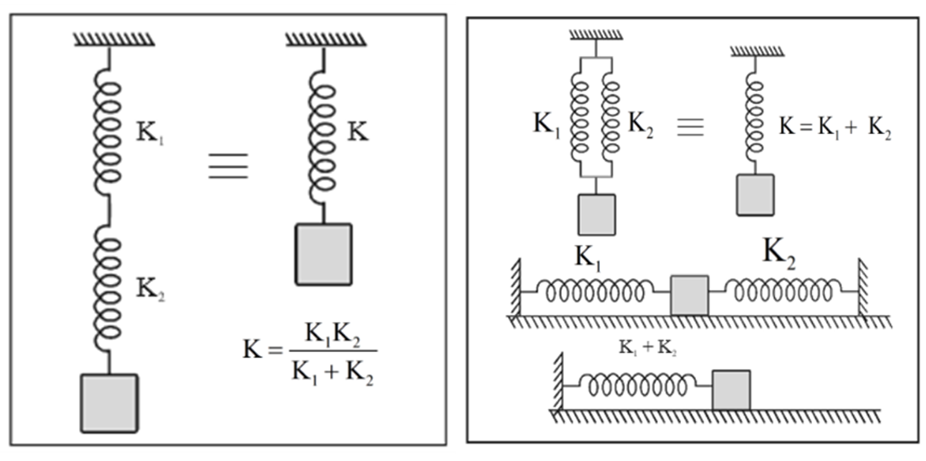
2. Spring in parallel : For a parallel combination as shown, the effective spring constant is K=K1+ K2
1. waves types and properties
Introduction
If you drop a little pebble in a pond of still water, the water surface gets disturbed. The disturbance does not remain confined to one place, but propagates outward along a circle. If you continue dropping pebbles in the pond, you see circles rapidly moving outward from the point where the water surface is disturbed. It gives a feeling as if the water is moving outward from the point of disturbance. If you put some cork pieces on the disturbed surface, it is seen that the cork pieces move up and down but do not move away from the centre of disturbance.
This shows that the water mass does not flow outward with the circles, but rather a moving disturbance is created. These patterns, which move without the actual physical transfer or flow of matter as a whole, are called waves.
For example: Consider a boy holding a thread and one end of thread is tied to the wall. When a boy moves the thread, the thread moves in the form of a wave.
In this Chapter, we will study such waves. In this chapter we will see the importance of waves in our life.
We will also study about the different properties of waves, some terms related to waves and also about different types of waves. We will also learn how waves propagate.
Waves
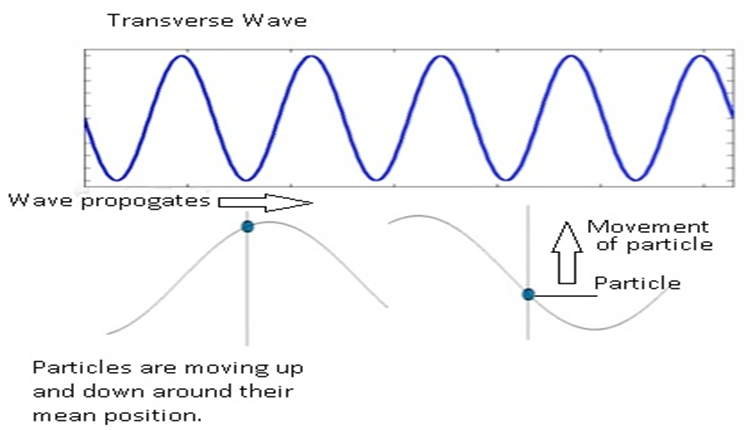
A wave is a kind of distribution due to repeated vibrations of particles from a normal or equilibrium condition, propagating without the transport of matter. In general a wave transports both energy and momentum. Waves transport energy and the pattern of distribution has information that propagates from one point to another.
For example: Consider the sound of the horn; this sound reaches our ear because of sound waves. There is transfer of energy from one point to another with the help of particles in the medium.
- These particles don’t move, they just move around their mean position, but the energy is getting transferred from one particle to another and it keeps on transferring till it reaches the destination.
- The movement of a particle is initiated by the disturbance. And this disturbance is transferred from one point to another through space and time.
Note:-Energy and not the matter is transferred from one point to another.
Types of Waves
- Mechanical waves
- Electromagnetic waves
- Matter waves
Mechanical waves: - The mechanical waves are governed by all of Newton’s laws of motion. Medium is needed for propagation of the wave. For Example: - Water Waves, Sound Waves
Electromagnetic waves: - Electromagnetic waves are related to electric and magnetic fields. An electromagnetic wave does not need a medium to propagate, it carries no mass, does carry energy. Examples: - Satellite system, mobile phones, radio, music player, x-rays and microwave.

Matter waves: - Waves related to matter. Matter consists of small particles .Matter waves are associated with moving electrons, protons, neutrons & other fundamental particles etc. It is an abstract concept.
Types of wave motion
Depending on the relationship between the direction of oscillation of individual particles and wave propagation, the waves are classified in two categories. They are Transverse waves and longitudinal waves.
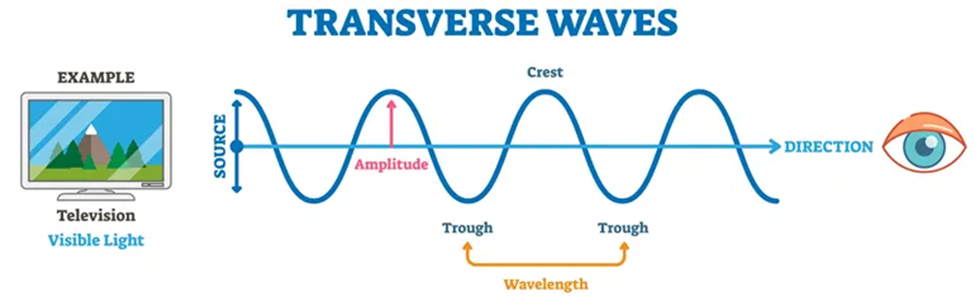
Transverse waves
The transverse waves are those in which the direction of disturbance or displacement in the medium is perpendicular to that of the propagation of the wave.
- The direction in which a wave propagates is perpendicular to the direction of disturbance.
For example: - Consider a man holding one end of a thread and the other end of the thread is fixed to the wall. When a little jerk is given to the thread in the upward direction. The entire thread moves in a wavy manner.
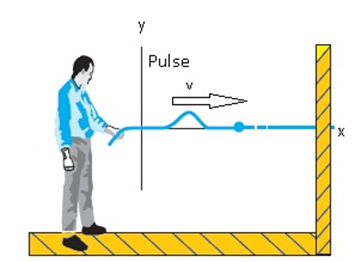
- The jerk propagated along the entire length of the thread.
- The small disturbance which came from the source at one end, that disturbance getting propagated and that is known as direction of propagation.
Disturbance is vertically upward and wave is horizontal. They are perpendicular to each other. This type of wave is known as transverse wave.
Conclusion: Transverse waves are those waves which propagate perpendicular to the direction of the disturbance. Direction of disturbance is the direction of motion of particles of the medium.
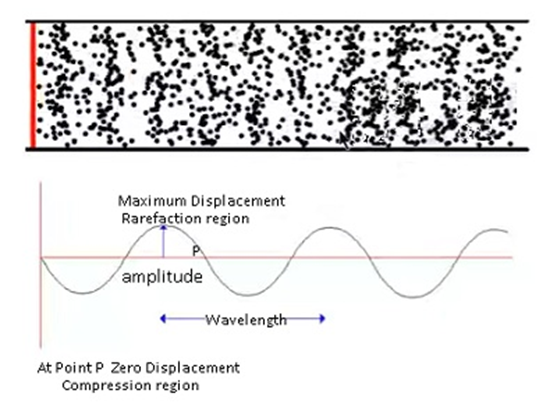
Longitudinal waves
The waves in which individual particles of the medium executes simple harmonic motion about their mean positions along the directions of propagation of the wave are called longitudinal waves.
For example: Waves in spring and sound waves etc.
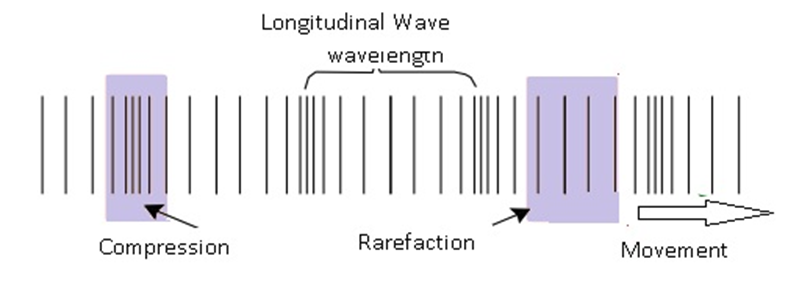
Longitudinal means something related to length. In longitudinal waves the direction of disturbance or displacement in the medium is along the propagation of the wave.
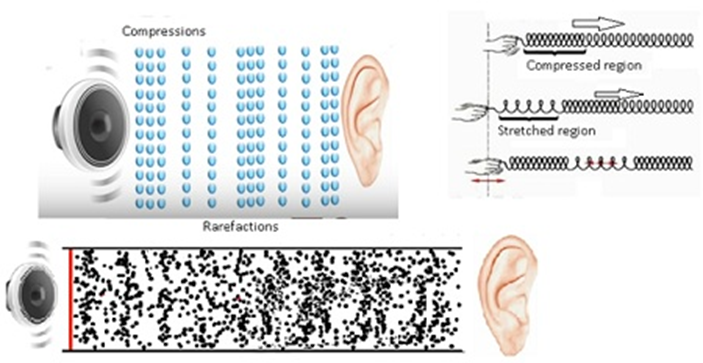
- In a Longitudinal wave there are regions where particles are very close to each other. These regions are known as compressions.
- In some regions the particles are far apart. Those regions are known as rarefactions.
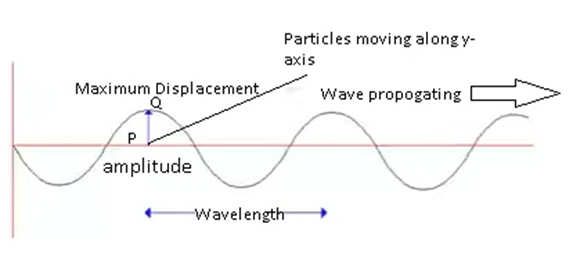
Displacement of progressive waves
Amplitude and phase together describe the complete displacement of the wave. Displacement function is periodic in space and time.
Displacement of the particles in a medium takes place along the y-axis. Generally displacement is denoted as a function of X and T, but here it is denoted by y.
In case of transverse wave displacement is given as: y(x, t)
Where x=propagation of the wave along x-axis, and particles oscillate along y-axis.
Therefore y(x, t) = A sin (kx – ωt + φ)
This is the expression for displacement. This expression is the same as the displacement equation which is used in oscillatory motion.
As cosine function; y(x, t) = B cos (kx – ωt + φ),
As both sine and cosine function) y (x, t) = A sin (kx – ωt + φ) + B cos (kx – ωt + φ).
Mathematically:
- Wave travelling along +X-axis: y(x, t) = a sin (kx – ωt + φ).
As time t increases the value of x increases. This implies the x moves along the positive x-axis.
- Waves travelling along -X axis: y(x, t) = a sin (kx +ωt + φ).
As time t decreases the value of x decreases. This implies the x moves along (-) ive x-axis.
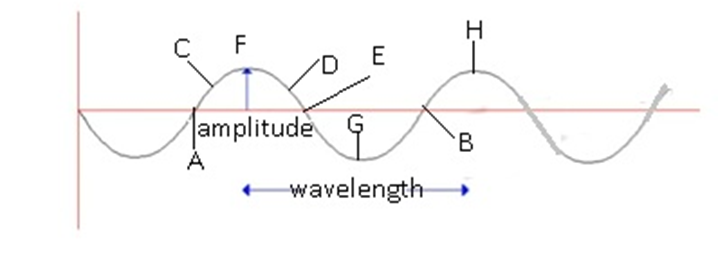
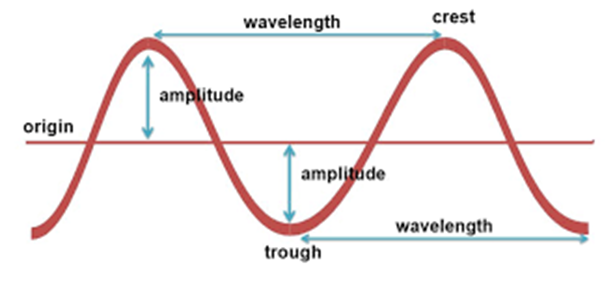
Amplitude and Phase of a wave Amplitude and phase together describes the position of the particle.
Amplitude is the maximum displacement of the elements of the medium from their equilibrium positions as waves pass through them. It is denoted by A.
- In Transverse waves the distance between the point P and Q (in the Figure) is maximum displacement. This maximum displacement of the particles is known as amplitude.
In Longitudinal waves In case of longitudinal waves the particles will not oscillate to a very large distance.
- Amplitude is the centre of two compressed regions. Because at the centre of the two compressed regions the particle is most free to displace to maximum displaced position.
Phase: Phase of a wave describes the state of motion as the wave sweeps through an element at a particular position.
In-phase– Two points are said to be in-phase with each other when these two points are at the same position and they both are doing the same thing i.e. both the two points are exhibiting the same behaviour. Points C and F are in phase with each other.
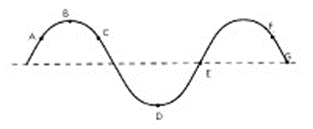
Out-of-phase –Two points are said to be out of phase even though they are at the same points but they are doing opposite things i.e. both the points are exhibiting the different behaviour.
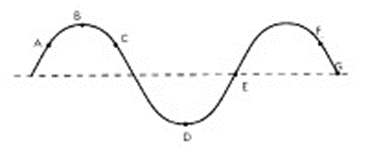
- Out of phase means which is not in phase.
- Points B and D,E and G are out of phase by 180 degree
Two waves can be completely in-phase or out of phase with each other. They can be partially in phase or out of phase with each other. Let’s try to understand the concept with help of an example
- Consider two points A and B on a wave. Their positions as well as their behaviour are the same. Therefore points A and B are in phase.
- Consider points A and C on a wave. They are not in phase with each other as their position is not the same.
- Similarly the points C and D are not in phase with each other as their positions are the same but the behaviour is different. Therefore they are not in phase with each other.
- Consider the points F and G. Their positions are the same but the behaviour is totally opposite. So F and G are out of phase.
- Consider the points F and H; they are in phase with each other as their position is the same as well as their behaviour.
Wavelength
Wavelength The term wavelength means length of the wave. Wavelength is defined as the minimum distance between two consecutive points in the same phase of wave motion. It is denoted by λ.
In case of transverse waves we use the term crest for the peak of the maximum displacement. The point of minimum displacement is known as trough.
In case of transverse wave wavelength is the distance between two consecutive crests or distance between two consecutive troughs.
In case of longitudinal waves, wavelength is the distance between the two compressions or the distance between the two rarefactions provided the compressions or rarefactions are nearest.
Wave Number
Wave number is the reciprocal of wavelength of a wave. It is defined as the number of waves per unit length. Since the unit of wavelength is a metre, the unit of wave number is the inverse of a metre.
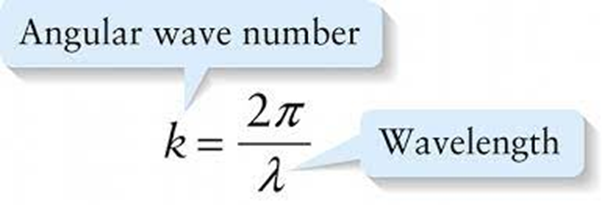
Time Period, Frequency and Angular frequency
- Time Period of a wave: - Time Period of a wave is the time taken through one complete oscillation. It is denoted by ’T’.
- Frequency of a wave: - Frequency of a wave is defined as the number of oscillations per unit time. It is denoted by f. f =1/T.
- Angular frequency: -Angular frequency is defined as the frequency of the wave in terms of a circular motion. The term angular frequency is used only when there is an angle involved in the motion in that particular motion .It is denoted by ‘ω’.
Travelling Waves Travelling waves are waves which travel from one medium to another. They are also known as progressive waves. Because they progress from one point to another.
- Both longitudinal and transverse waves can be travelling waves.
- Wave as a whole moves along one direction.
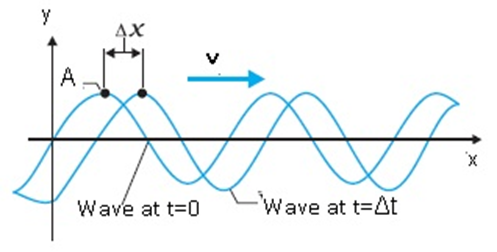
Speed of a transverse wave in a stretched string
Consider a stretched string and if given transverse disturbance on one end then the disturbance travels throughout the string. Thereby giving rise to transverse waves. The particles move up and down and the waves travel perpendicular to the oscillation of the particles.
Transverse wave speed determined by two factor which are:
- Mass per unit length- As mass gives rise to Kinetic energy. If no mass then no kinetic energy. Then there will be no velocity. It is denoted by μ.
- Tension-Tension is the key factor which makes the disturbance propagate along the string. Because of tension the disturbance travels throughout the wave. It is denoted by T.
Dimensional Analysis to show how the speed is related to mass per unit length and Tension
μ = [M]/ [L] …… (i)
T=F=ma =
Dividing equation (i) by (ii):-
![]()
Therefore ![]() , where C=dimensionless constant
, where C=dimensionless constant
Conclusion: velocity v depends on properties of the medium and not on frequency of the wave.
Speed of a longitudinal wave in a stretched string
Longitudinal wave speed determined by:
Density – Longitudinal waves are formed due to compressions (particles very close to each other) and rarefactions (particles are far from each other).
At certain places it is very dense and at certain places it is very less dense. So density plays a very important role. It is denoted by ρ.
Bulk modulus– Bulk modulus tells how the volume of a medium changes when the pressure on it changes.
If we change the pressure of compressions or rarefaction then the volume of the medium changes. It is denoted by B.
Dimensional Analysis to show how the speed is related to density and bulk modulus
ρ =mass/volume=
B = - (Change in pressure (ΔP))/Change in volume (ΔV/V))
ΔV/V is a dimensionless quantity as they are 2 similar quantities.
Dividing
We know that
![]()
Where C=dimensionless constant
In case of fluids: - v= C √ (B/ ρ)
In case of solids: - v= C √ (Y/ ρ)
The principle of superposition of waves
Principle of superposition of waves describes how the individual waveforms can be algebraically added to determine the net waveform.
Waveform tells about the overall motion of the wave. It does not tell about individual particles of the wave.
Suppose we have 2 waves and Example of superposition of waves is Reflection of waves.
Mathematically: -
Case1:- Consider 2 waves which are in phase with each other. They have the same amplitude, same angular frequency, and same angular wave number.
If wave 1 is represented by y1(x, t) =a sin (kx – ωt).
Wave 2 is also represented by y2(x, t) =a sin (kx – ωt).
By the principle of superposition
The resultant wave y(x t) = (2a sin (kx – ωt)) will also be in phase with both the individual waves but the amplitude of the resultant wave will be more.
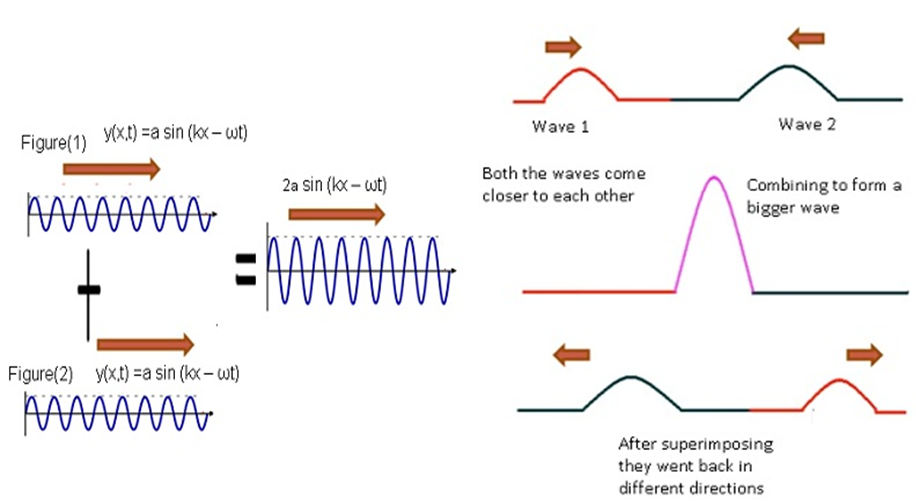
Case2:- Consider when the two waves are completely out of phase. φ = π
If wave 1 is represented by y1(x, t) =a sin (kx – ωt).
Wave 2 is represented by y2(x, t) =a sin (kx – ωt+ π).
Y2 =a sin (π-(-kx+ ωt) which gives y2=-a sin (kx- ωt)
Therefore by superposition principle y=y1+y2=0
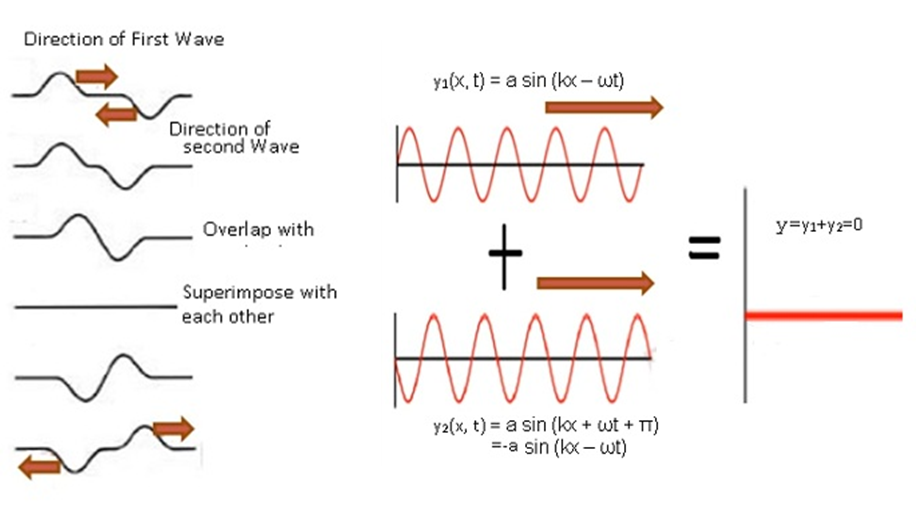
Case 3:- Consider when the two waves partially out of phase φ>0; φ<π
If wave 1 is represented by y1(x, t) =a sin (kx – ωt).
Wave 2 is represented by y2(x, t) =a sin (kx – ωt+ φ).
Therefore by the principle of superposition of waves,
y = y1+ y2 = a [sin (kx-ωt) +sin (kx – ωt+ φ]
y=2a cos (φ/2) sin (kx – ωt + (φ/2))
(By using the formula sinA +sinB=2sin (A+B)/2) cos (A-B)/2)
Amplitude = 2a cos (φ/2) and Phase will be determined by (φ/2).
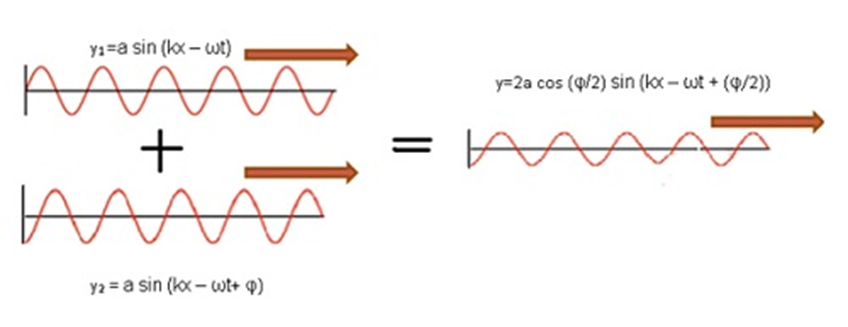
2. fluid dynamics
Fluid dynamics
So far we have studied fluids at rest now we will discuss fluid in motion. The study of fluids in motion is known as fluid dynamics. When a water-tap is turned on slowly, the water flow is smooth initially but loses its smoothness when the speed of the outflow is increased. In studying the motion of fluids we focus our attention on what is happening to various fluid particles at a particular point in space at a particular time.
Streamline flow or steady flow
Some streamlines for fluid flow
- The flow of a fluid is said to be steady if at any point, the velocity of each passing fluid particle remains constant within that interval of time.
- Streamline is the path followed by the fluid particle.
- It means that at any particular instant the velocities of all the particles at any point are the same. But the velocity of all the particles won’t be the same across all the points in space.
- Steady flow is termed as ‘Streamline flow’ and ‘Laminar flow’.
- No two streamlines can intersect.
- If two streamlines intersect each other, the particles won’t know which path to follow and what velocity to attain. That is why no two streamlines intersect.
To understand it more clearly let us try to understand this with the help of the example.
- Consider a case when all the particles of fluid passing point A have the same velocity. This means that the first particle will have velocity V1 and second will have velocity V1 and so on. All the particles will have the same velocity V1 at point A.
- At point B, all particles will have velocity V2. Similarly, at point C the velocity of all the particles is V3.
We can see that the velocity is changing from point to point but at one particular point, it is the same.
Equation of Continuity
According to the equation of continuity
Where A =cross-sectional area and V=velocity with which the fluid flows.
It means that if any liquid is flowing in streamlined flow in a pipe of non-uniform cross-section area, the rate of flow of liquid across any cross-section remains constant.
Consider a fluid flowing through a tube of varying thickness.
Let the cross-sectional area at one end (I) = A1 and the cross-sectional area of the other end (II) = A2.
The velocity and density of the fluid at one end (I) =v1, ρ1respectively, velocity and density of fluid at other end.
Volume covered by the fluid in a small interval of time Δt across left cross-section
Volume covered by the fluid in the same time across the right section=
Mass of fluid passes from the left end in time Δt=
Mass of fluid passes from the right end in time Δt =
If the fluid inside is incompressible which means volume doesn’t change with time and density remains the same then we have
This is called the equation of continuity.
This equation is termed as the conservation of mass of incompressible fluid.
Turbulent flow
Turbulent flow, a type of fluid (gas or liquid) flow in which the fluid undergoes irregular fluctuations, or mixing, in contrast to laminar flow, in which the fluid moves in smooth paths or layers. In turbulent flow, the speed of the fluid at a point is continuously undergoing changes in both magnitude and direction
This means fluid particles are moving here and there, they are not moving in an organized manner. They all will have different velocities. All the particles are moving here and there randomly.
Bernoulli’s equation
Fluid flow is a complex phenomenon. But we can obtain some useful properties for steady or streamlined flows using the conservation of energy.
Consider a fluid moving in a pipe of varying cross-sectional area. Let the pipe be at varying heights as shown in the figure. We now suppose that an incompressible fluid is flowing through the pipe in a steady flow
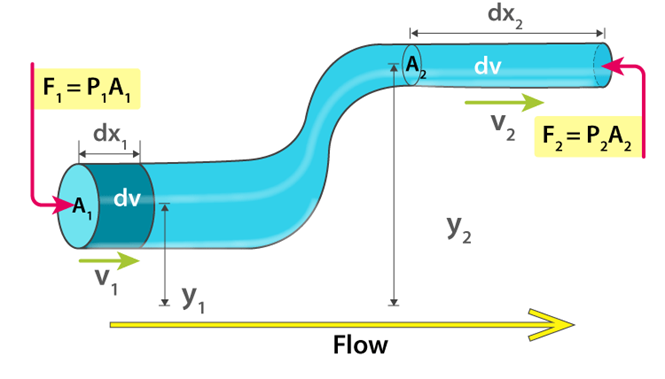
Its velocity must change as a consequence of the equation of continuity. A force is required to produce this acceleration. Which is caused by the fluid surrounding it, the pressure must be different in different regions.
The statement of Bernoulli’s principle
For a streamlined fluid flow, the sum of the pressure (P), the kinetic energy per unit volume
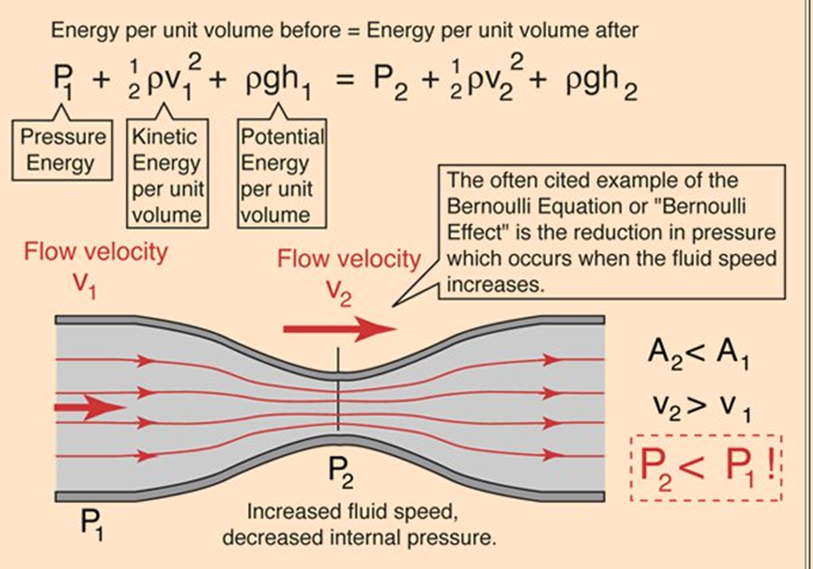
Assumptions in Bernoulli’s equation:
- Fluid flows through a pipe of varying width.
- Pipe is located at changing heights.
- Fluid is incompressible.
- Flow is laminar.
- No energy is lost due to friction: applicable only to non-viscous fluids.
When a fluid is at rest i.e. its velocity is zero everywhere, Bernoulli’s equation becomes P1 + ρgh1 = P2 + ρgh2; (P1 − P2) = ρg (h2 − h1)
Speed of Efflux - Torricelli's law
The word efflux means flow outward. Torricelli discovered that the speed of efflux from an open tank is given by a formula identical to that of a freely falling body.
Consider a tank containing a liquid of density ρ with a small hole in its side at a height y1 from the bottom (see figure given below). The air above the liquid, whose surface is at height y2, is at pressure P. From the equation of continuity, we have
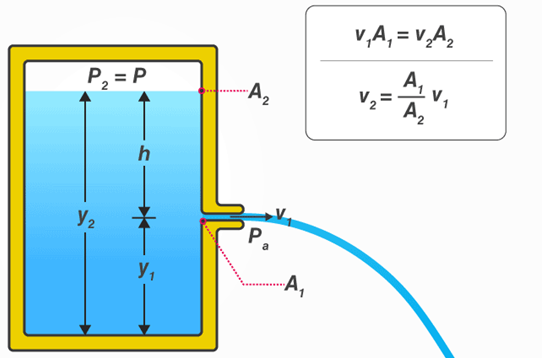
If the cross-sectional area of tank A2 is much larger than that of the hole (A2 >>A1), then we may take the fluid to be approximately at rest at the top, i.e. v2 = 0. Now applying the Bernoulli equation at points 1 and 2 and noting that at the whole P1 = Pa, the atmospheric pressure.
From Bernoulli’s equation we have ![]()
Simplifying we get ![]()
![]()
By taking
So finally we have ![]()
Since P1=Pa and P2=P
Then,![]()
Case 1: When the tank is open from the top P = Pa, then ![]()
This is the speed of a freely falling body. And the above equation is known as Torricelli’s law
Case 2: When the Tank is not open to the atmosphere but P>>Pa.
Therefore 2gh is ignored as it is very large, hence v1= √2P/ρ.
The velocity with which the fluid will come out of the container is determined by the pressure at the free surface of the fluid alone.
Venturimeter
Venturimeter is a device to measure the flow of incompressible liquid.
It consists of a tube with a broad diameter having a larger cross-sectional area but there is a small constriction in the middle.
It is attached to a U-tube manometer. One end of the manometer is connected to the constriction and the other end is connected to the broader end of the Venturimeter.
The U-tube is filled with a fluid whose density is ρ.
A1= cross-sectional area at the broader end, v1 = velocity of the fluid.
A2=cross-sectional area at the constriction, v2= velocity of the fluid.
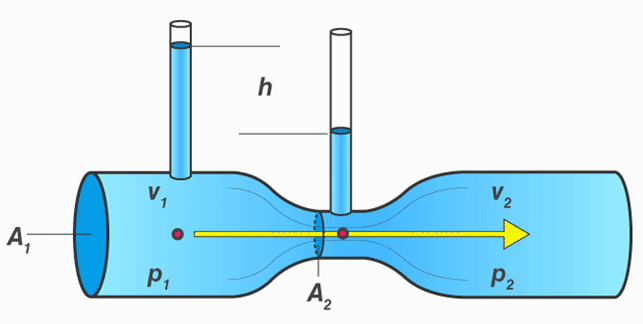
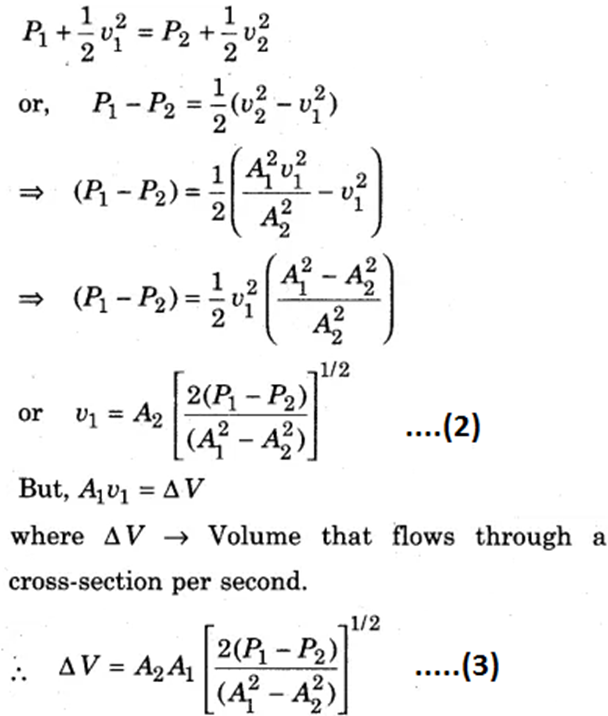
The principle behind this meter has many applications. Filter pumps or aspirators, Bunsen burners, atomizers and sprayers used for perfumes or to spray insecticides work on the same principle.
Blood flow and heart attack
Bernoulli’s principle helps in explaining blood flow in arteries.
- When the artery gets constricted due to the accumulation of plaque on its inner walls. In order to drive the blood through this constriction, a greater demand is placed on the activity of the heart.
- The speed of the flow of the blood in this region is raised which lowers the pressure inside and the artery may collapse due to the external pressure.
- As the blood rushes through the opening, the internal pressure once again drops due to the same reasons leading to a repeat collapse. This may result in a heart attack.
Dynamics lift
Dynamic lift is the force that acts on a body, such as an airplane wing, a hydrofoil or a spinning ball, by virtue of its motion through a fluid. In many games such as cricket, tennis, baseball, or golf, we notice that a spinning ball deviates from its parabolic trajectory as it moves through air.
Dynamic lift on airplane wings:-
Dynamic lift is most popularly observed in airplanes.
Whenever an airplane is flying in the air, due to its motion through the fluid here fluid is air in the atmosphere. Due to its motion through this fluid, there is a normal force that acts on the body in the vertically upward direction. This force is known as Dynamic lift.
Consider an airplane whose body is streamlined. Below the wings of the airplane, there is air that exerts an upward force on the wings. As a result, airplane experiences a dynamic lift.

Magnus Effect
Dynamic lift by virtue of spinning is known as the Magnus effect.
Magnus effect is a special name given to dynamic lift by virtue of spinning. Example:-Spinning of a ball.
Case1:-When the ball is not spinning.
- The ball moves in the air, it does not spin, the velocity of the ball above and below the ball is the same.
- As a result there is no pressure difference. (ΔP= 0). Therefore there is no dynamic lift.

Case2:- When the ball is moving in the air as well as spinning.
- When the ball spins it drags the air above it therefore the velocity above the ball is more as compared to the velocity below the ball.
- As a result, there is a pressure difference; the pressure is more below the ball. Because of the pressure difference, there is an upward force which is the dynamic lift.

Viscosity
Most of the fluids are not ideal ones and offer some resistance to motion. This resistance to fluid motion is like internal friction analogous to friction when a solid moves on a surface. It is called viscosity. This force exists when there is relative motion between layers of the liquid.
Suppose we consider a fluid like oil enclosed between two glass plates as shown. The bottom plate is fixed while the top plate is moved with a constant velocity v relative to the fixed plate. If oil is replaced by honey, a greater force is required to move the plate with the same velocity. Hence we say that honey is more viscous than oil.
Stoke’s law
The force that retards a sphere moving through a viscous fluid is direct ∝ to the velocity and the radius of the sphere, and the viscosity of the fluid.
Mathematically: - F =6πηrv where
Let retarding force F ∝ v where v =velocity of the sphere
F ∝ r where r=radius of the sphere
F ∝ η where η=coefficient of viscosity and 6π = constant
Stokes law is applicable only to the laminar flow of liquids. It is not applicable to turbulent law.
Example: - Falling raindrops
Consider a single raindrop, when the raindrop is falling it is passing through air. The air has some viscosity; there will be some force that will try to stop the motion of the raindrop.
Initially, the raindrop accelerates but after some time it falls with constant velocity.
As the velocity increases the retarding force also increases. There will be vicious force Fv and bind force Fb acting in the upward direction. There will also be Fg gravitational force acting downwards.
After some time Fg = Fr (Fv+Fb)
Net Force is 0. If force is zero as a result acceleration also becomes zero.
Terminal Velocity
Terminal velocity is the maximum velocity of a body moving through a viscous fluid.
It is attained when the force of resistance of the medium is equal and opposite to the force of gravity.
As the velocity is increasing the retarding force will also increase and a stage will come when the force of gravity becomes equal to the resistance force.
After that point velocity won’t increase and this velocity is known as terminal velocity. It is denoted by ‘vt’.Where t=terminal.
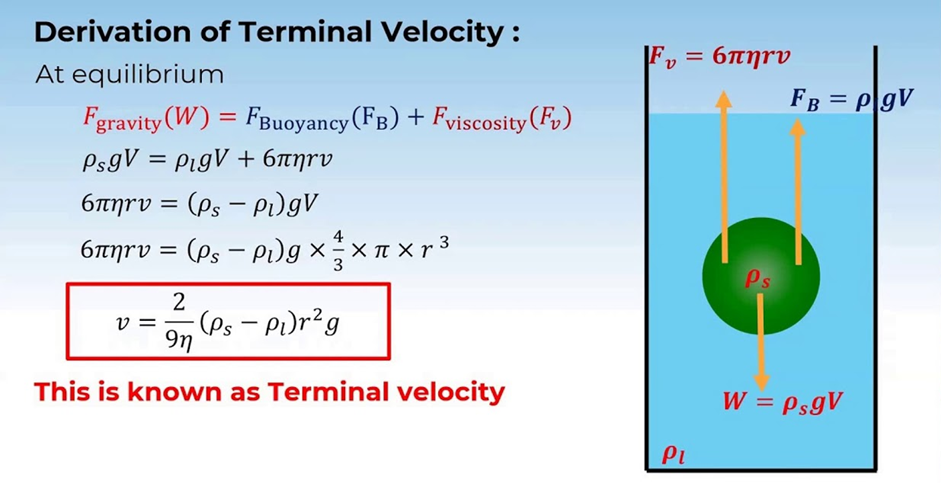
3. Surface Tension and energy
Liquid Surfaces
Certain properties of free surfaces:-
Whenever liquids are poured in any container they take the shape of that container in which they are poured and they acquire a free surface.
Consider a case if we pour water inside the glass it takes the shape of the glass with a free surface at the top.
Top surface of the glass is a free surface. Water is not in contact with anything else, it is in contact with the air only. This is known as free surfaces. Liquids have free surfaces. As liquids don’t have a fixed shape they have only fixed volume.
Free surfaces have additional energy as compared to inner surfaces of the liquid called surface energy.

Surface Energy
Surface energy is the excess energy exhibited by the liquid molecules on the surface compared to those inside the liquid. This means liquid molecules at the surface have greater energy as compared to molecules inside it.
Suppose there is a tumbler and when we pour water in the tumbler, it takes the shape of the tumbler. It acquires a free surface.
Case 1: When molecules are inside the liquid:-
Suppose there is a molecule inside the water, there will be several other molecules that will attract that molecule in all directions.
As a result, this attraction will bind all the molecules together. This results in negative potential energy of the molecule as it binds the molecule.
To separate this molecule a huge amount of energy is required to overcome potential energy. Some external energy is required to move this molecule and it should be greater than the potential energy.
Therefore a large amount of energy is required by the molecules which are inside the liquid.
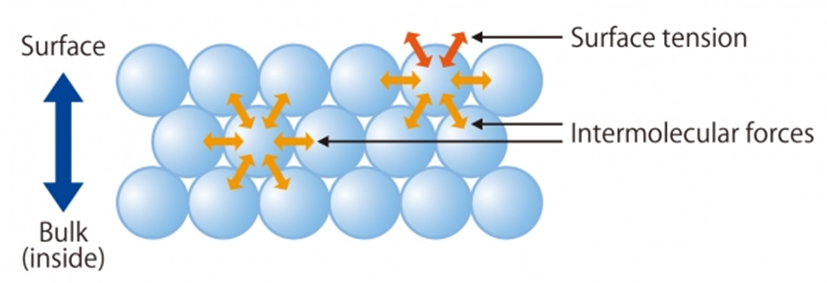
Case2: When the molecules are at the surface:-
When the molecule is at the surface, half of it will be inside and half of it is exposed to the atmosphere.
The lower half of the molecule, it will be attracted by the other molecules inside the liquid. But the upper half is free. The negative potential energy is only because of the lower half.
But the magnitude is half as compared to the potential energy of the molecule which is fully inside the liquid. So the molecule has some excess energy, because of this additional energy which the molecules have at the surface different phenomena happen like surface energy, and surface tension.
Liquids always tend to have the least surface area when left to themselves.
As more surface area will require more energy as a result liquids tend to have less surface area.
Surface Tension
Surface tension is the property of the liquid surface which arises due to the fact that surface molecules have extra energy.
Surface tension is the surface energy per unit area of the liquid surface. It can be also defined as Force per unit length on the liquid surface
Surface tension(S) =Surface Energy/area
At any interface (it is a line that separates two different mediums) the surface tension always acts in the equal and opposite directions and it is always perpendicular to the line at the interface.
A fluid will stick to a solid surface if the surface energy between fluid and solid is smaller than the sum of energies between solid-air and fluid-air.
This means Ssf (solid-fluid) < Sfa (fluid air) + Ssa (Solid air)
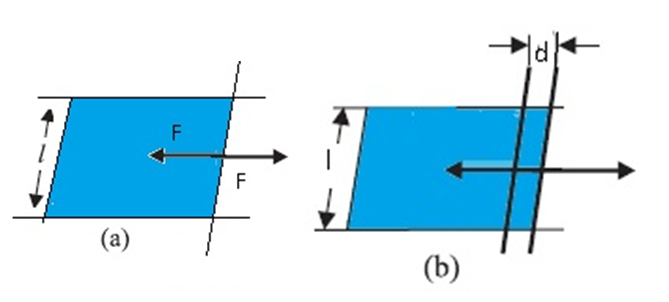
Stretching a film (a) A film in equilibrium ;(b) the film stretched an extra distance.
Why does water stick to glass but Mercury doesn’t?
In the case of water and glass, water sticks to glass because the surface energy of water and glass is less than the surface energy between water and air and between glass and air. S.E (w-g) < S.E (w-a) +S.E (g-a)
In the case of mercury, Surface Energy between mercury and glass S.E (m-g), Surface energy between mercury and air S.E (m-a), and Surface Energy between air and glass S.E (a-g). E (m-g)> S.E (m-a) +S.E (a-g)

Angle of Contact
The angle of contact is the angle at which a liquid interface meets a solid surface. It is denoted by θ. It is different at the interfaces of different pairs of liquids and solids.
For example - A droplet of water on a lotus leaf. The droplet of water (Liquid) is in contact with the solid surface which is a leaf.
This liquid surface makes some angle with the solid surface. This angle is known as the angle of contact.
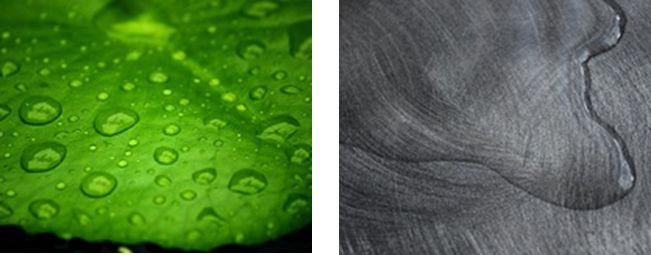
Water forms a spherical shape on the lotus leaf but it splits on the table.
Significance of Angle of Contact
Angle of contact determines whether a liquid will spread on the surface of a solid or it will form droplets on it.
- If the Angle of contact is obtuse: then droplets will be formed.
- If the Angle of contact is acute: then the water will spread.
Case1: When the droplet is formed
Consider we have a solid surface, a droplet of water which is liquid and air.
The solid-liquid interface is denoted by Ssl, the solid air interface is denoted by Ssa and the liquid-air interface is denoted by Sla.
The angle which Ssl makes with Sla. It is greater than 90 degrees. Therefore a droplet is formed.
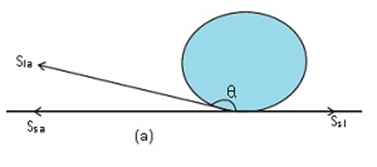
Case 2: When water just spreads
The angle at which liquid forms with a solid surface is less than 90 degrees.
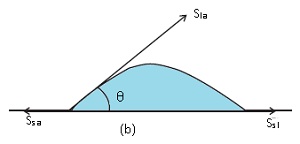
Drops and Bubbles
Why are water and bubbles drop?
Whenever liquid is left to itself it tends to acquire the least possible surface area so that it has the least surface energy so it has the most stability.
Therefore for more stability, they acquire the shape of a sphere, as the sphere has the least possible area.

Spherical Shape
Distinction between Drop, Cavity and Bubble
- Drop: - Drop is a spherical structure filled with water.
- There is only one interface in the drop.
- The interface separates water and air.
Water droplets
Cavity: -Cavity is a spherical shape filled with air. In the surroundings there is water and in the middle, there is a cavity filled with air. There is only one interface that separates air and water.
Example: - bubble inside the aquarium.
Bubble: - In a bubble there are two interfaces. One is air and water and another is water and air. Inside a bubble there is air and there is air outside. But it consists of a thin film of water.

Pressure inside a drop and a cavity
Pressure inside a drop is greater than the pressure outside.
Suppose there is a spherical drop of water of radius ‘r’ which is in equilibrium.
Consider there is an increase in radius which is Δr.
Therefore Extra Surface energy = Surface Tension(S) x area
Sla x 4π(r+Δr) 2 – Slax4πr2
After calculating Extra Surface energy=8πr Δr Sla
At Equilibrium, Extra Surface energy = Energy gain due to the pressure difference
8πr Δr Sla = (Pi - Po) 4πr2xΔr
Where Pi= Pressure inside the drop and Po = Pressure outside the drop.
After calculation Pi - Po = 2 Sla/r
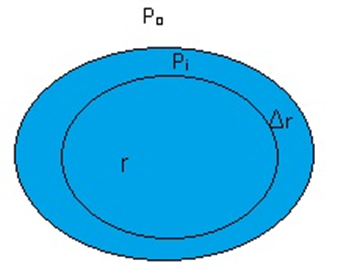
Pressure inside a Bubble
- Pressure inside a bubble is greater than the pressure outside.
- As bubble has 2 interfaces, Pi-Po=2Sla/r x 2
- Therefore, Pi-Po=4Sla/r

Conclusion: - In general, for a liquid-gas interface, the convex side has a higher pressure than the concave side.
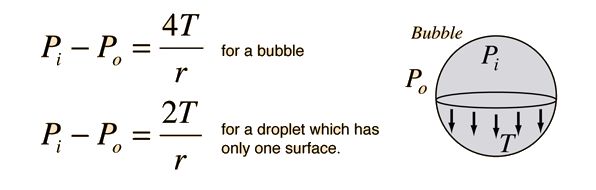
Capillary Rise
In Latin the word Capilla means hair. Due to the pressure difference across a curved liquid-air interface, the water rises up in a narrow tube in spite of gravity.
Consider a vertical capillary tube of circular cross-section (radius a) inserted into an open vessel of water.
The contact angle between water and glass is acute. Thus the surface of the water in the capillary is concave. As a result, there is a pressure difference between the two sides of the top surface. This is given by
(Pi – Po) = (2S/r) = 2S/ (a sec θ) = (2S/a) cos θ (i)
Thus the pressure of the water inside the tube, just at the meniscus (air-water interface) is less than the atmospheric pressure.
Consider the two points A and B. They must be at the same pressure,
P0 + h ρ g = Pi = PA (ii)
Where ρ is the density of water, and h is called the capillary
h ρ g = (Pi – P0) = (2S cos θ)/a (By using equations (i) and (ii))
Therefore the capillary rise is due to surface tension. It is larger, for a smaller radius.
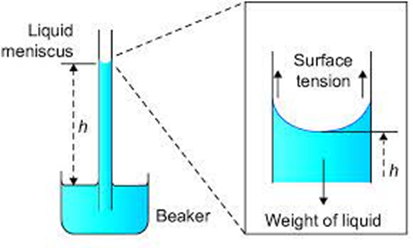
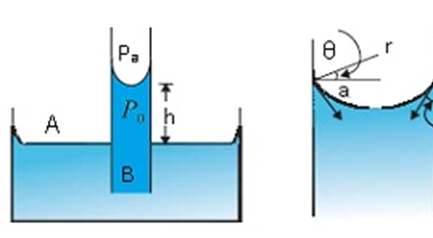
2. calorimetry and heat transfer
Calorimetry
Calorimetry is made up of two words calorie which means heat and metry which means measurement.
When two bodies of different temperature are allowed to share heat, they attain a common temperature. If it is assumed that no heat is received from or given to anybody outside the system and if there is no chemical reaction involved in the process of sharing then,
Heat gain by the colder body= Heat loss by the hotter body
The above statement is called the principle of calorimetry and this is based on the law of conservation of energy.
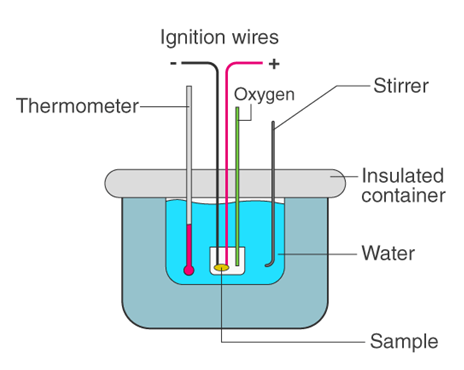
A calorimeter consists of a metallic vessel and a stirrer both are made of the same material (copper or aluminium) and the vessel is kept in a wooden jacket so that there is no heat loss .A mercury thermometer can be inserted through a small opening in the outer jacket.
Change of state
Depending on temperature and pressure, all matter can exist in a solid, liquid and gaseous state. These states of matter are also called phases of matter.
The change of state from solid to liquid is called melting and from liquid to solid is called fusion. It is observed that the temperature remains constant until the entire amount of solid substance melts. That is both the solid and the liquid state of the substance co-exist in thermal equilibrium during the change in state from solid to liquid.
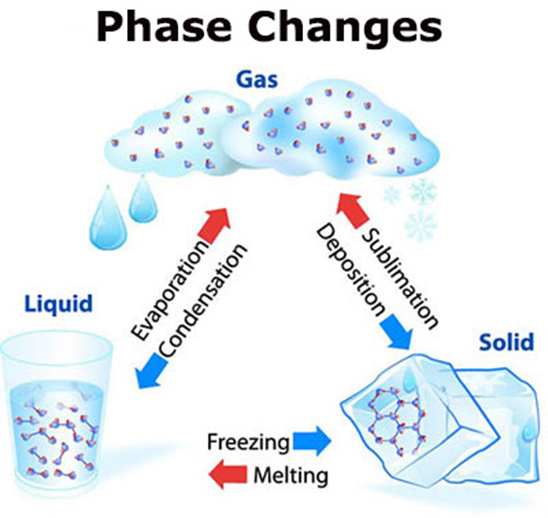
The temperature at which the solid and the liquid state of the substance is in thermal equilibrium with each other is called its melting point. The change of state from the liquid to vapour is called vaporisation.
It is observed that the temperature remains constant until the entire amount of liquid is converted into vapour.
The temperature at which the liquid and the vapour states of the substance coexist is called its boiling point. The change from solid to vapour state without passing through the liquid state is called sublimation and substance is said to sublimate.
As altitude increases, the density of the air becomes thinner, and thus exerts less pressure. At high altitudes, external pressure on water is therefore decreased and will hence take less energy to break the water. If less energy is required it means less heat and less temperature which means that water will boil at a lower temperature.
Latent heat
Latent heat is defined as the heat or energy that is released during a phase change of a substance. It could be either from a gas to a liquid or liquid to solid and vice versa. Latent heat is related to a heat property called enthalpy.
However, an important point that we should consider regarding latent heat is that the temperature of the substance remains constant. As far as the mechanism is concerned, latent heat is the work that is needed to overcome the attractive forces that hold molecules and atoms together in a substance.
Let’s take an example. Suppose a solid substance is changing to a liquid, it needs to absorb energy to push the molecules into a wider, more fluid volume. Similarly, when a substance changes from a gas phase to a liquid, their density levels also need to go from lower to a higher level wherein the substance then needs to release or lose energy so that the molecules come closer together. In essence, this energy that is required by a substance to either freeze, melt or boil is said to be latent heat.
Two types of Latent heat
- Latent heat of fusion
- Latent heat of vaporisation
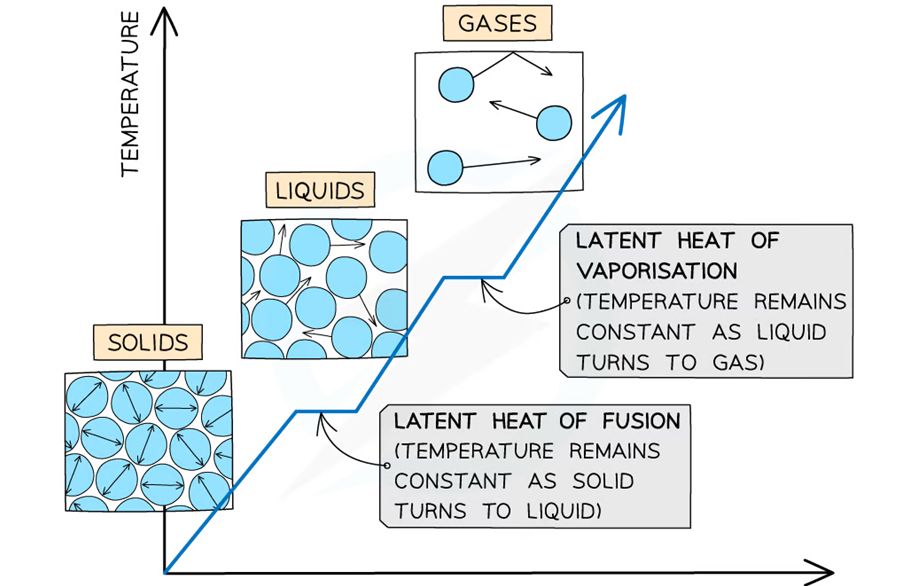
Latent heat of fusion: It is the amount of the heat which is required to change the phase of the solid into liquid for unit mass at constant temperature.
For example: Latent heat of fusion of water is
Latent heat of vaporisation: It is the amount of heat which is required to change the phase of the liquid into vapour for unit mass at constant temperature.
For example: Latent heat of water is
Heat transfer
Any matter which is made up of atoms and molecules has the ability to transfer heat. The atoms are in different types of motion at any time. The motion of molecules and atoms is responsible for heat or thermal energy and every matter has this thermal energy. The more the motion of molecules, the more will be the heat energy. However, talking about heat transfer, it is nothing but the process of transfer of heat from a high-temperature body to a low temperature one.
There are three mechanisms of heat transfer whose name is given as conduction, convection and radiation.
- Conduction occurs within a body or between two bodies in contact
- Convection depends on the motion of mass from one region to another,
- Radiation is heat transfer by electromagnetic radiations such as sunshine, with no need for matter to be present in the space between bodies.
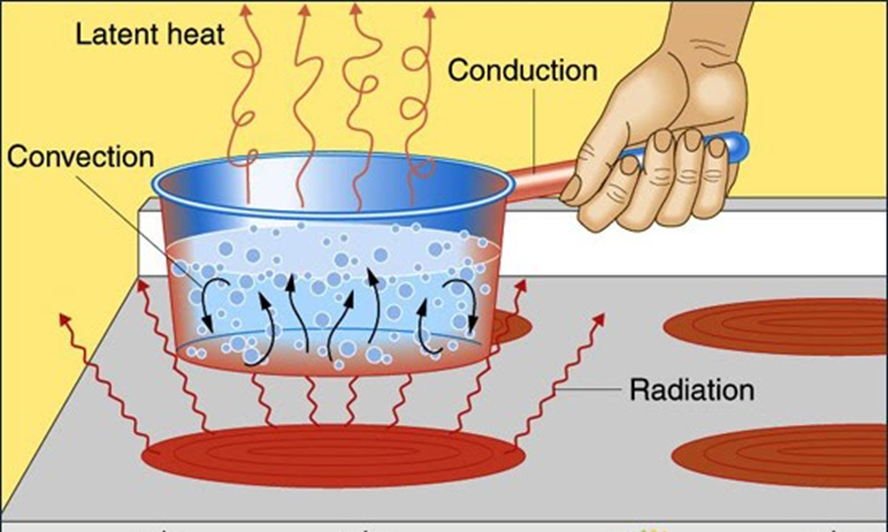
Conduction
Conduction is the mechanism of transfer of heat between two adjacent parts of a body because of their temperature difference .Suppose one end of a metallic rod is put in a flame the other end of the rod will soon be so hot that I cannot hold it with your bare hands.
Here, heat transfer takes place by conduction from the hot end of the rod through its different parts to the other end. Gases are poor thermal conductors while liquids have conductivities intermediate between solids and gases.
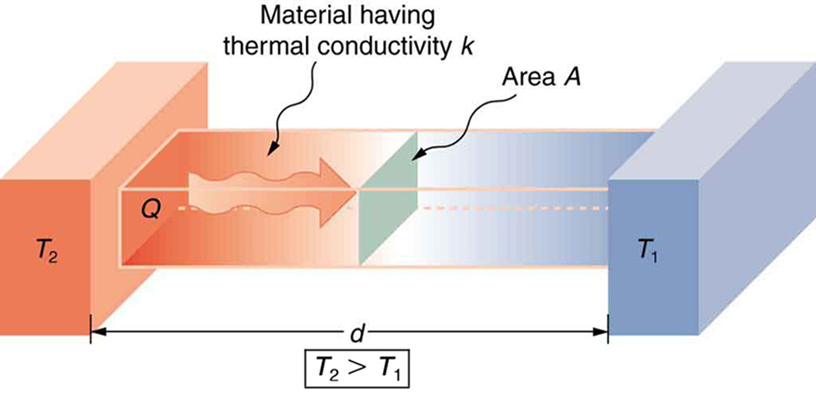
The rate of heat energy flowing through the rod becomes constant at steady state. It is given by, Rate of flow of heat ![]()
Where K= thermal conductivity of material
A= cross-section area; d= distance between the two end
T2 and T1 are the temperatures of hotter and colder bodies. Following are the examples of conduction:
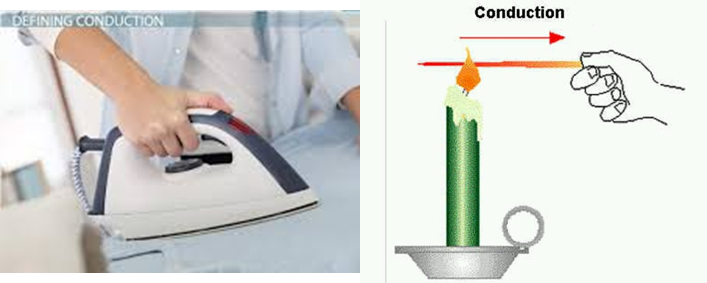
- Ironing of clothes is an example of conduction where the heat is conducted from the iron to the clothes.
- Heat is transferred from hands to ice cubes resulting in the melting of an ice cube when held in hands.
- Heat conduction through the sand at the beaches. This can be experienced during summers. Sand is a good conductor of heat.
Convection
Convection is a mode of heat transfer by actual motion of matter. It is possible only in fluids. Convection can be natural or forced.
In natural convection, gravity plays an important part. When a fluid is heated from below, the hot part expands and therefore becomes less dense. Because of buoyancy, it rises and the upper colder part replaces it. This again gets heated and rises up and is replaced by a relatively colder part of the fluid. The process goes on.
In forced convection material is forced to move by a pump or some other physical means. Examples of forced convection are the circulatory system, cooling system, and heat connector of an automobile.
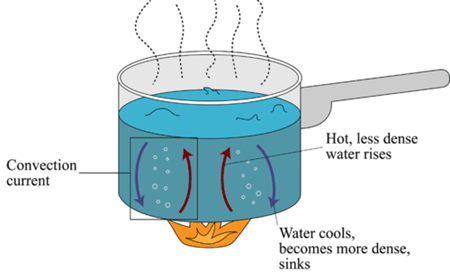
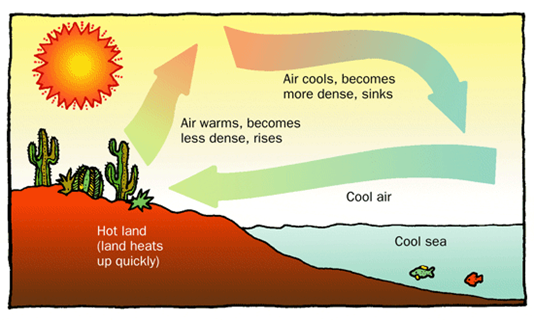
Radiation
Radiation is the transfer of heat by electromagnetic waves such as visible light, infrared and ultraviolet rays. Everyone has felt the warmth of the sun’s radiations and intense heat from a charcoal grill or the glowing coal in the fireplace. Most of the heat from these bodies reaches you not by conduction or convection in the intervening air but by radiation. This heat transfer would occur even if there were nothing but a vacuum between you and the source of heat.
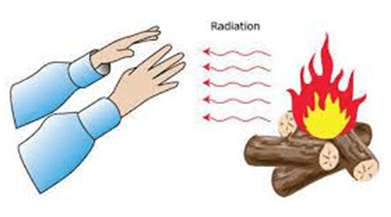
Black body radiation
All bodies emit radiant energy, whether they are solid, liquids or gases. The electromagnetic radiation emitted by a body by virtue of its temperature like the radiation by a red hot iron or light from a filament lamp is called thermal radiation.
When this thermal radiation falls on other bodies, it is partly reflected and partly absorbed. The amount of heat that a body can absorb by radiation depends on the color of the body.
Everybody both radiates and absorbs energy from their surroundings. The amount of energy absorbed is proportional to the color of the body.
A black body is an idealization in physics that pictures a body that absorbs all electromagnetic radiation incident on it irrespective of its frequency or angle.
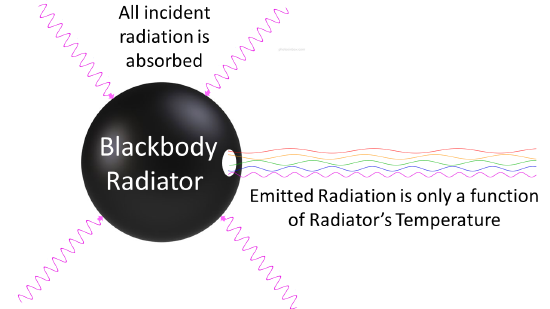
Black-body radiation is the thermal electromagnetic radiation emitted by a black body within or surrounding a body in thermodynamic equilibrium with its environment (an idealized opaque, non-reflective body).
It has a specific spectrum of wavelengths that are inversely related to intensity and are only affected by the body's temperature, which is assumed to be uniform and constant for the sake of calculations and theory.
Emissive power: The amount of heat energy radiated per unit area of the surface of a body, per unit time and per unit wavelength range is constant which is called emissive power
Absorptive power: The ‘absorptive power ‘of a surface at a given temperature is the ratio of the heat energy absorbed by a surface to the total energy incident it at a certain time. It is represented by
Wein’s displacement law
The blackbody radiation curve for different temperature peaks at a wavelength is inversely proportional to the temperature.
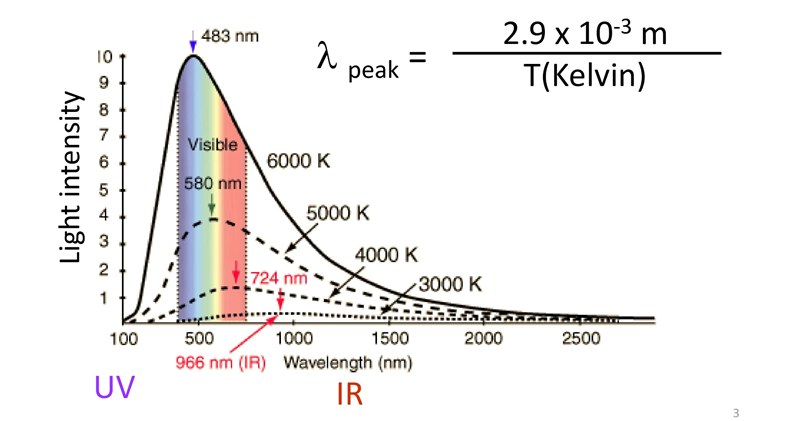
Stefan- Boltzmann law
The Stefan- Boltzmann law explains the relationship between total energy emitted and the absolute temperature
Stefan's Law states that the radiated power density of a black body is directly related to its absolute temperature T raised to the fourth power.
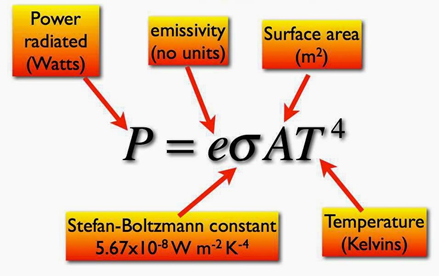
Greenhouse Effect
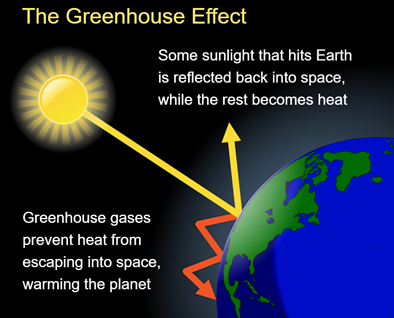

The greenhouse effect is the way in which heat is trapped close to Earth's surface by “greenhouse gases.” These heat-trapping gases can be thought of as a blanket wrapped around Earth, keeping the planet toastier than it would be without them.
The main gases responsible for the greenhouse effect include carbon dioxide, methane, nitrous oxide, and water vapor (which all occur naturally), and fluorinated gases (which are synthetic)
The largest source of greenhouse gas emissions from human activities in the United States is burning fossil fuels for electricity, heat, and transportation.
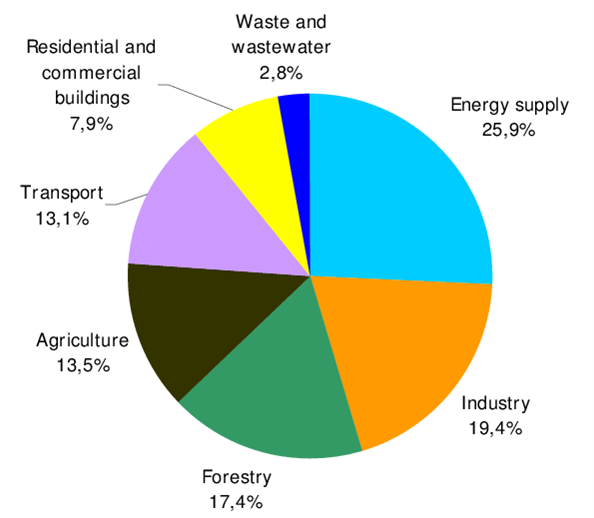
Newton’s law of cooling
Newton’s law of cooling describes the rate at which an exposed body changes temperature through radiation which is approximately proportional to the difference between the object’s temperature and its surroundings, provided the difference is small.
Definition: According to Newton’s law of cooling, the rate of loss of heat from a body is directly proportional to the difference in the temperature of the body and its surroundings.
Greater the difference in temperature between the system and surroundings, the more rapidly the heat is transferred and faster the body changes its temperature.
Newton’s law of cooling is given by,
![]()
Where,
- Tt = temperature of the body at time t and
- Ts = temperature of the surrounding,
- k = Positive constant that depends on the area and nature of the surface of the body under consideration
A fun thing to try: Virtual lab
Below is the link of the simulation of the Black Body radiation
This simulation gives us lots of information. In this simulation, we have a graph between spectral Power density and the wavelength. This graph can be drawn for various objects at different temperatures Like Star Sirius at temperature 10000 K to earth at 300 K.
- For the selected temperature of the black body, we can see at which wavelength(
- We can also in which part of electromagnetic spectrum do it falls like ( Infrared, Visible, UV etc)
- We can verify the wien's displacement law (
2. Second law of thermodynamics
Thermodynamics processes: Quasi-static process
Quasi-static term means semi-static. It is not purely moving. It is a hypothetical construct which means it is not real. It is an infinitely slow process which means change from its original position is not at all significant.
System changes its variables (P, T, and V) so slowly that it remains in equilibrium with its surroundings throughout.
The characteristic for a system to be a Quasi-static process is that it is an extremely very slow process and there should not be any accelerated motion.
In a quasi-static process, the temperature of the surrounding reservoir and the external pressure differ only infinitesimally from the temperature and pressure of the system.
Isothermal process
When a thermodynamic system undergoes a process under the condition that its temperature remains constant, then the process is said to be an isothermal process. The essential condition for an isothermal process is that the system must be contained in a perfectly conducting chamber.
For the isothermal process,
From the first law of thermodynamics,
From Ideal gas equation
Pressure and volume are inversely proportional to each other for isothermal processes.
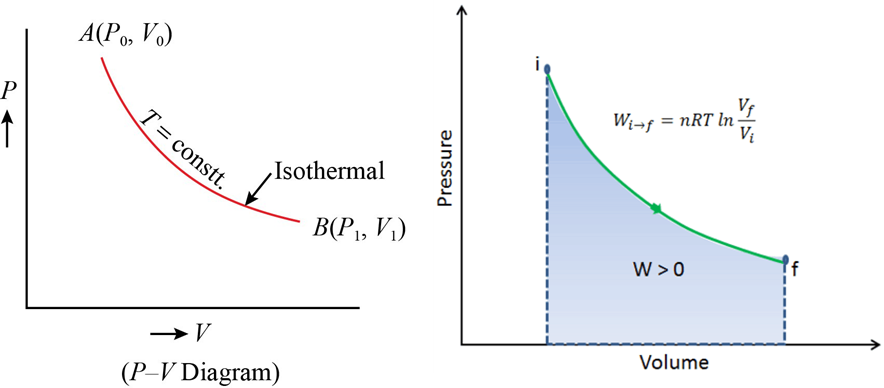
Derivation of work done in the Isothermal process
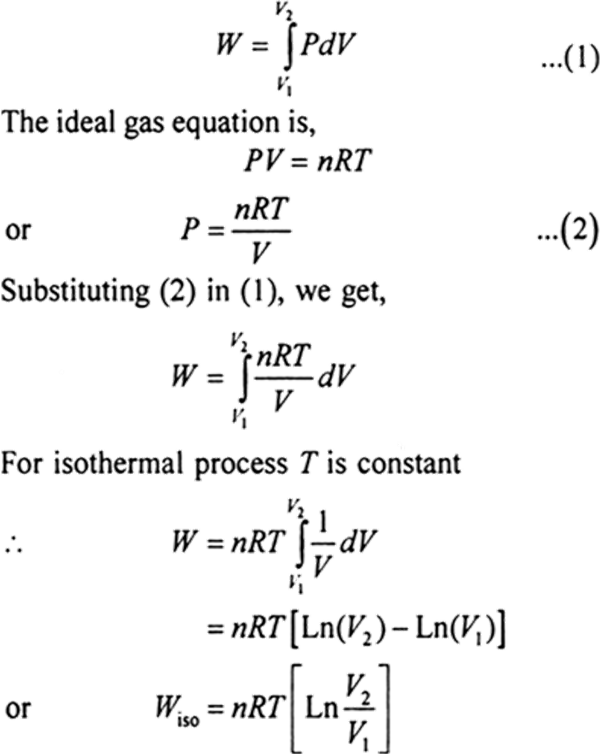
Heat taken
Adiabatic Process
When a thermodynamic system undergoes a process under the condition that no heat comes into or goes out of the system, then the process is said to be an adiabatic process. Such a process can occur when a system is perfectly insulated from its surroundings. These processes are sudden processes.
For the adiabatic process Q=0 (there is no heat transfer taking place).
From first law of thermodynamics
So we have
Conditions for adiabatic processes: The walls of the container should be perfectly non-conducting in order to prevent any exchange of heat between the gas and its surroundings. The process of compression or expansion must be rapid so that there is no time for the exchange of heat.
These conditions are ideal conditions and are difficult to achieve.
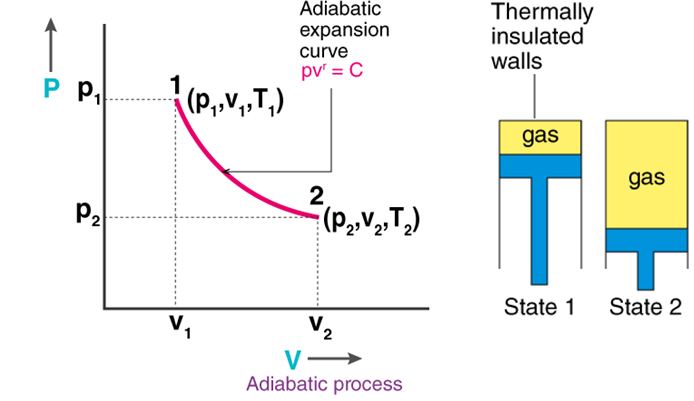
Equation of state of Adiabatic processes
The most widely used equation of state of adiabatic process is in terms of pressure and volume
Here ![]()
If we use the ideal gas equation
We will get two more equations of states for adiabatic processes
- In terms of volume and temperature:
- In terms of pressure and temperature:
Calculation of work done in case of adiabatic processes
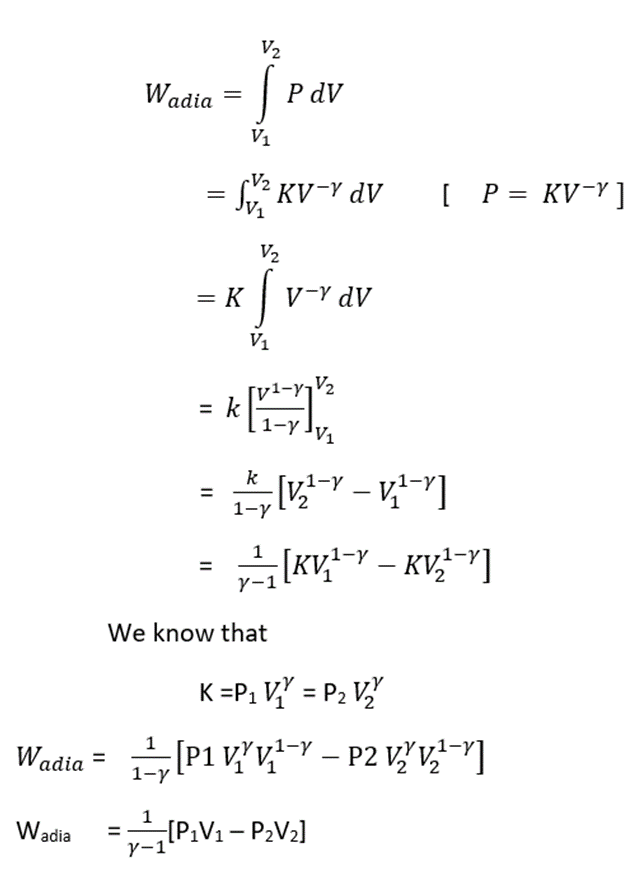
Isobaric process
If the working substance is taken in an expanding chamber in which the pressure is kept constant, the process is called an isobaric process. In this process, the gas either expands or shrinks to maintain constant pressure and hence a net amount of work done by the system or on the system.
Isochoric process
If a substance undergoes a process in which the volume remains unchanged, the process is called an isochoric process. The increase of pressure and temperature produced by the heat supplied to a working substance contained in a non-expanding chamber is an example of the isochoric process.
By first law of thermodynamics,
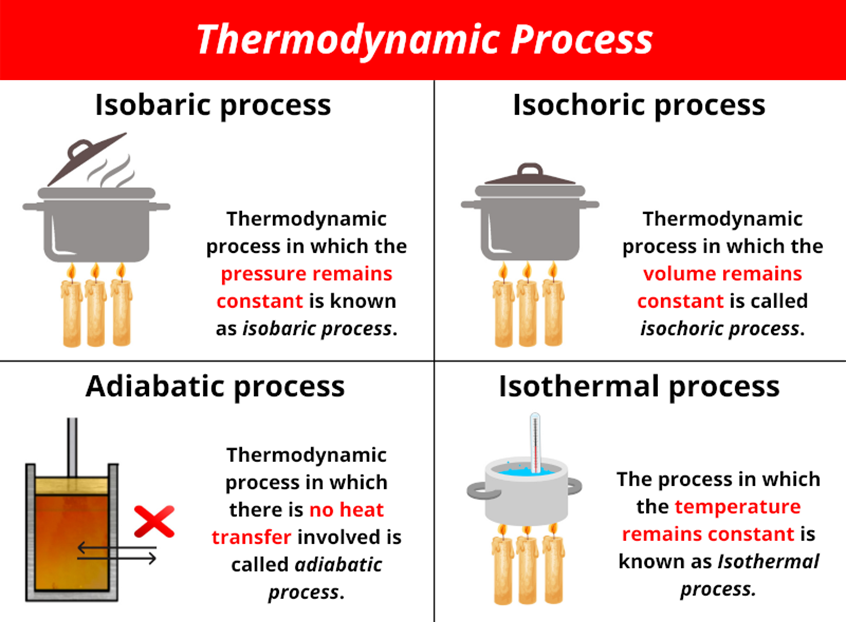
Cyclic Process
The process in which the initial and final state is the same is known as a cyclic process. It is a sequence of processes that leave the system in the same state in which it started. Hence, the work done by the system in a cyclic transformation is equal to the heat absorbed by the system.
In Cyclic Process, since the internal energy is a state variable, ΔU = 0, i.e., the internal change is zero. The initial and final internal energies remain equal.
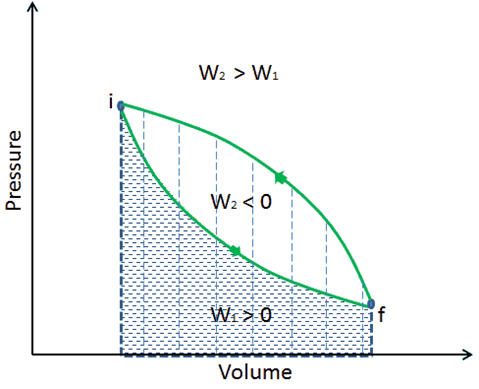
Therefore, the work done by the system in the cyclic process is equal to the heat that the system absorbs. In a P-V graph, where P is on the Y-axis and V is on the X-axis, the network involved in the cyclic process is the area enclosed in the diagram. If the cycle goes anticlockwise, then work is done on the system in every cycle.
Heat Engine
A cyclic device by which heat is converted into mechanical energy gets is called a heat engine. For a heat engine, there are essentially three elements:-
Source: A hot body at a fixed temperature T1 from which heat can be drawn heat is called a source or hot reservoir.
Sink: A cold body which is at fixed temperature T2 to which any amount of heat can be rejected is called a sink or cold reservoir.
Working substance: The materials, on being supplied heat perform mechanical work is called working substance.
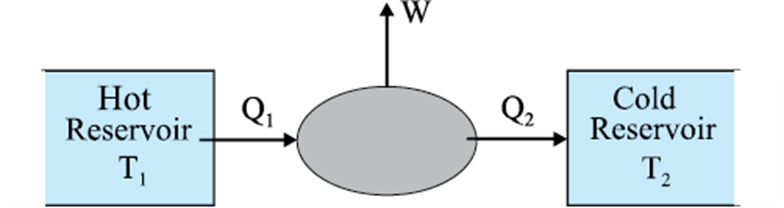
In a heat engine, the working substance takes in heat into the source, converts a part of it into external work, gives out the rest in the sink and returns to its initial state. This series of operations constitute a cycle. The work can be continuously obtained by performing the same cycle and over again.
Suppose the working substance takes Q1 heat from the source at temperature T1 and gives out Q2 heat to the sink at temperature T2. Suppose W be the amount of work obtained. The net amount of heat absorbed by the substance Q1 -Q2, which has been actually converted into work.
According to the first law of thermodynamics for a full cycle,
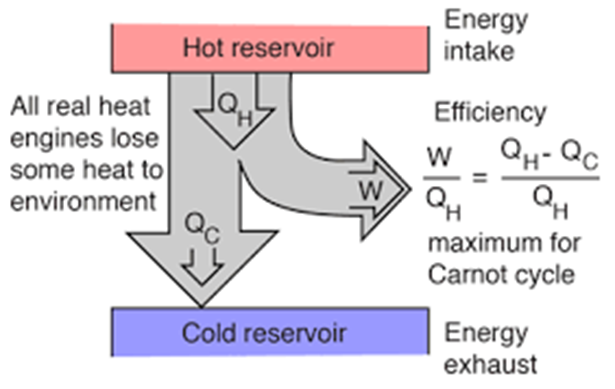
Efficiency of the engine
The thermal efficiency of an engine is defined as the ratio of the work obtained to the heat taken in from the source that is
![]()
This equation indicates that the efficiency of the heat engine will be unity when Q2=0, this is however not possible in practice. This means that the engine cannot convert all the heat taken from the source into work.
Refrigerator and heat pump
A refrigerator or heat pump is a device utilized for cooling things.
Key Elements
- A cold reservoir at temperature T2
- A working substance
- A hot reservoir at temperature T1
Working
- The working substance follows a cycle consisting of several processes.
- A sudden expansion of the gas from high to low pressure cools it and converts it into a vapor-liquid mixture.
- Absorption by the cold fluid of heat from the region to be cooled converts it into vapor.
- The vapor gets heated up due to external work done on the working substance.
- The heat gets released by the vapor to the surroundings bringing it to the initial state and completing the cycle.
Coefficient of performance of the refrigerator.
It is denoted by
Where Q2 is the heat extracted from the cold reservoir and
W is the work done on the system- The refrigerant.
Also work done ![]() . In a heat engine, heat cannot be fully converted to work; likewise, a refrigerator cannot work without some external work done on the system, i.e., the coefficient of performance cannot be infinite.
. In a heat engine, heat cannot be fully converted to work; likewise, a refrigerator cannot work without some external work done on the system, i.e., the coefficient of performance cannot be infinite.
Second law of Thermodynamics
This has two statements. First is the kelvin-Planck statement which is based upon the performance of the heat engine and second is Clausius statement which is based on the performance of the refrigerator.
These are 2 statements of second law of thermodynamics given as,
Kelvin-Planck Statement: - No process is possible whose result is the absorption of heat from a reservoir and the complete conversion of the heat into work.
Clausius statement: - No process is possible whose result is the transfer of heat from a colder object to a hotter object.
Explanation of Kelvin-Planck Statement: It is always impossible that the total amount of heat which is supplied to the system will get converted to work, and there will always be loss of heat. Complete conversion of heat into work is not possible.
Explanation of Clausius statement: - Transfer of heat from a colder body to hotter body won’t take place until some external work is done on the system.
Reversible and Irreversible processes
Reversible Process
A thermodynamic process is reversible if the process can be turned back such that the system and surroundings return to their original states, with no other change anywhere else in the universe.
This means in the Reversible processes if a process starts from the initial state then it goes to the final state and then it can be reversed back from final state to the initial state.
Examples: - Isothermal expansion and compression, Electrolysis, extension of spring etc
A process is reversible if:-
- It is quasi-static
- No dissipative forces (that is no loss of heat by friction etc.).
- Both initial and final states of the system are in thermodynamic equilibrium with each other.
Irreversible Process
An irreversible process can be defined as a process in which the system and the surroundings do not return to their original condition once the process is initiated. Irreversible processes are those that cannot be reversed.
Two causes which give rise to irreversible processes
- Irreversible processes take place at a very fast rate.
- Dissipative Effects.
Examples:-Plastic deformation, Combustion, Diffusion, Falling of water from the hill, relative motion with friction, heat transfer.
Carnot Engine
- A Carnot engine is named after a Carnot scientist.
- It is a reversible heat engine operating between two temperatures.
- It has a maximum efficiency which no other engine can have.
Construction
The essential sections of an ideal heat engine or Carnot heat engine are shown in the diagram below.
- Source of heat: The source is maintained at a fixed higher temperature T1, from which the working substance takes heat. The source is supposed to possess the infinite thermal capacity and as such, any amount of heat can be taken from it without altering its temperature.
- Sink of heat: The sink is maintained at a fixed lower temperature T2, to which any amount of heat can be emitted by the working substance. It also has the infinite thermal capacity and as such its temperature remains constant at T2, even when any amount of heat is emitted to it.
- Working substance: A perfect gas plays the role of a working substance. It is contained in a cylinder with non-conducting sides but having a perfectly conducting base. This cylinder is fixed with a perfectly non-conducting and frictionless piston.
Apart from these essential parts, there is also a perfectly insulating stand or pad on which the cylinder can be positioned. It provides complete isolation to the working substance from the surroundings so that the gas can undergo adiabatic changes.
Cycle of processes in a Carnot engine
Basic Function of any heat engine is it will take heat Q1 from a hot reservoir at temperature T1 and give heat Q2 to a cold reservoir at temperature T2.
- The system is absorbing heat so it is isothermal expansion. Engine absorbs heat Q1 at temperature T1.
- An adiabatic expansion takes place inside the engine because of which there is increase in the temperature of the engine from T1 to T2 but no flow of heat.
- The system is releasing heat so it is an isothermal contraction. Engine releases heat Q2 at temperature T2.
- An adiabatic compression takes place again which changes the temperature of the system from T2 to T1.
- One cycle of the Carnot engine will have Isothermal expansion then adiabatic process, and then isothermal contraction followed by an adiabatic process. This will keep on repeating.
The efficiency of Carnot engine is given by ![]()
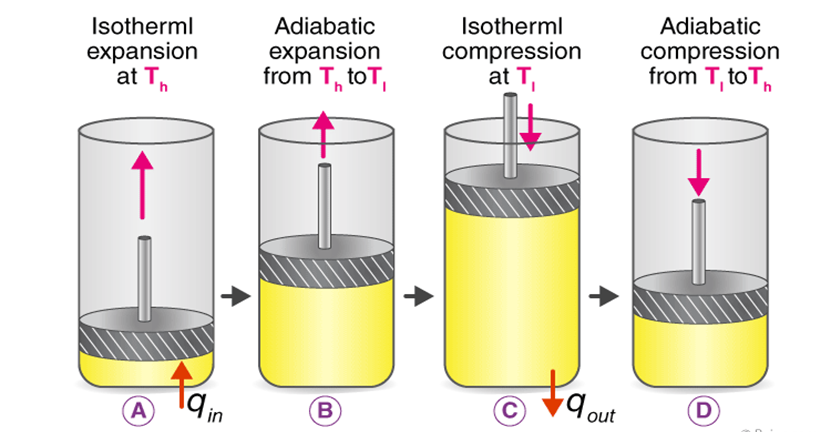
Below is the P-V diagram describing every step of the cycle and the work done in each cycle?
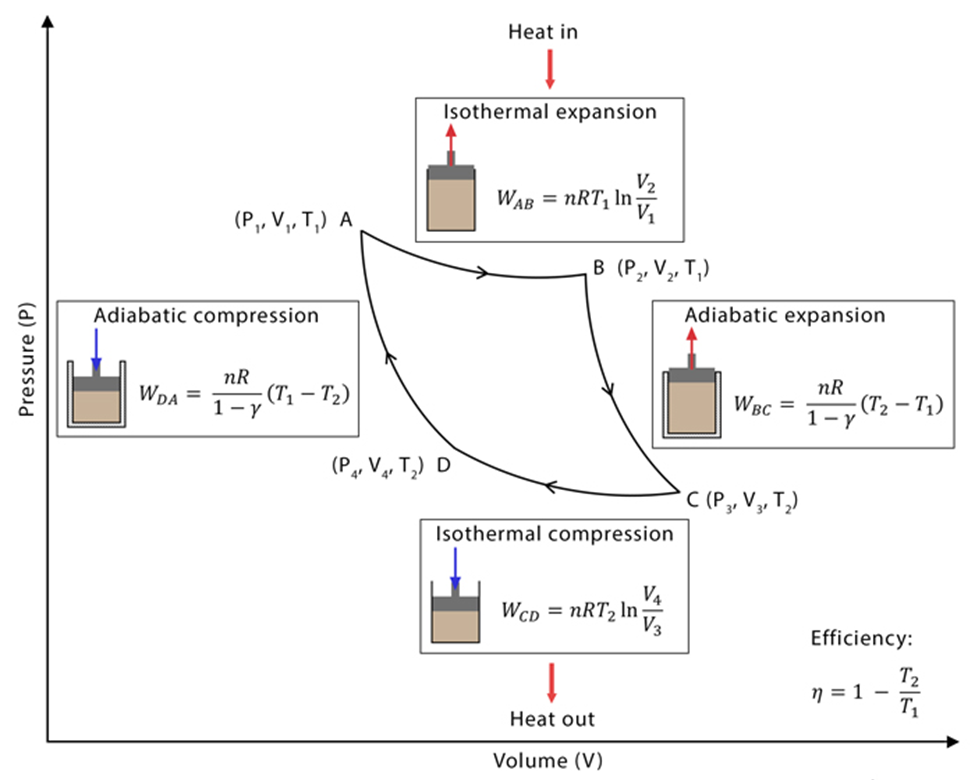
2. Law of equipartition of energy
Law of Equipartition of energy: Degrees of Freedom
Degrees of Freedom can be defined as independent displacements or rotations that specify the orientation of a body or system. A molecule free to move in space needs three coordinates to specify its location.
If it is constrained to move in a plane it needs to. If constrained to move along a line, it needs just one coordinate to locate it.
For example:-Consider a room and if we tie a thick rope from one wall to another.
Take a ball which is moving straight on the rope. The ball has only 1 degree of freedom. It can move only in one particular dimension. Consider if the ball is on the floor which is two-dimensional, then the ball can move along 2 directions. The ball has 2 degrees of freedom.
Consider if we throw the ball in space which is 3 dimensional. Then the ball can move in 3 dimensions. Therefore degree of freedom tells us in how many ways a body can move or rotate or vibrate.
Categories of Degrees of Freedom
1. Translational degrees of freedom.
2. Rotational degrees of freedom.
3. Vibrational degrees of freedom.
Translational degree of freedom:-
Translation means motion of the body as a whole from one point to another.
For example:
- Consider the oxygen molecule; it has 2 oxygen atoms which are bonded together. The 2 oxygen atoms along with the bond are considered as the whole body. When the body as a whole is moving from one point to another is known as translational.
- Consider a molecule which is free to move in space and so it will need 3 coordinates(x, y, and z) to specify its location. Therefore it has 3 degrees of freedom.
- Similarly a molecule which is free to move in a plane which is 2 dimensional and so it needs 2 coordinates to specify its location. Therefore it has 2 degrees of freedom.
- Similarly a molecule which is free to move in line needs 1 coordinate to specify its location. Therefore it has 1 degree of freedom.
- Molecules of monatomic gas have only translational degrees of freedom. This means gases which have only one atom. For example:-Helium atom it consists of only one He atom. It will have translational degrees of freedom.
- Each translational degree of freedom contributes a term that contains a square of some variable of motion.
The variable of motion means the velocity
The term ![]() will contribute to energy. This is Kinetic energy which is involved with the motion of the molecule from one point to another.
will contribute to energy. This is Kinetic energy which is involved with the motion of the molecule from one point to another.
In thermal equilibrium, the average of each such term is ![]()
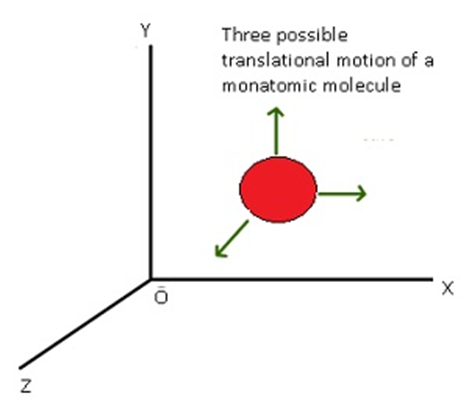
Rotational Degree of freedom
Independent rotations that specify the orientation of a body or system. There is rotation of one part of the body with respect to the other part.
Rotational degree of freedom happens only in diatomic gas. Diatomic molecules have rotational degrees of freedom in addition to translational degrees of freedom.
It is possible in diatomic molecules as 2 atoms are connected together by a bond. So the rotation of one atom w.r.t. to another atom.
For example: - Two oxygen atoms joined together by a bond. There are two perpendicular axes. There are 2 rotations possible along the two axes. They have 3 translational degrees of freedom and also 2 rotational degrees of rotation.
Therefore Rotational degree of freedom contributes a term to the energy that contains the square of a rotational variable of motion.
Rotational variable of motion comes from angular momentum ω.
Linear velocity is
These are 3 rotational degrees of freedom along the 2 perpendicular axes.
The total energy contribution due to the degrees of freedom for oxygen molecules. There will be 3 translational degree of freedom and two rotational degree of freedom
Kinetic energy contribution from translational motion is given by![]()
Kinetic energy contribution from rotational motion is given by ![]()
Vibrational degree of freedom
Some molecules have a mode of vibration, i.e. atoms oscillate along the inter-atomic axis like a one-dimensional oscillator. This vibration is observed in some molecules. For example - CO atoms oscillate along the interatomic axis like a one-dimensional oscillator.
Consider two 2 atoms vibrating along the inter-atomic axis. The vibrational energy terms contain squares of vibrational variables of motion.
Total vibrational energy term ![]()
Where, ![]() = Kinetic energy and
= Kinetic energy and ![]() = Potential energy and k = force constant one-dimensional oscillator.
= Potential energy and k = force constant one-dimensional oscillator.
The vibrational degree of freedom contributes 2 terms.
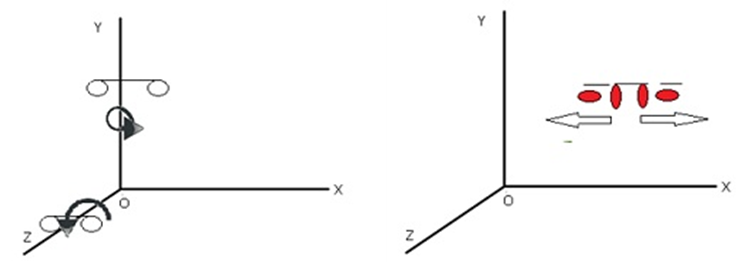
(1) In the first figure rotational motion along two axes perpendicular to line joining two particles (here y and z directions) is shown.
(2) In the second figure vibrational motion along line joining the two atoms is shown
Comparison between 3 energy modes
Law of Equipartition of energy
According to this law, in equilibrium, the total energy is equally distributed in all possible energy modes, with each mode having average energy equal to ![]() .
.
- Each translational degree of freedom contributes

- Each rotational degree of freedom contributes

- Each vibrational degree of freedom contributes
Specific Heat Capacity for monoatomic gases Monoatomic gases will only have a translational degree of freedom. Maximum they can have is three translational degrees of freedom. Each degree of freedom will contribute ![]() . Therefore 3 degrees of freedom will contribute
. Therefore 3 degrees of freedom will contribute ![]()
- By using law of equipartition of energy, the total internal energy of 1 mole of gas
 .
. - Specific heat capacity at constant volume
 .
. - For an ideal gas

- Ratio of specific heats γ=CP/CV=(5/3).
Specific Heat of Diatomic gases (rigid)
A rigid diatomic gas means they will have translational as well as rotational degrees of freedom but not vibrational. They are rigid oscillators.
A rigid diatomic molecule will have 3 translational degrees of freedom and 2 rotational degrees of freedom. Total 5 degrees of freedom.
- By law of equipartition of energy, each degree of freedom will contribute
 .
. - Therefore 5 degree of freedom will contribute
 Therefore the total internal energy of 1 mole of gas
Therefore the total internal energy of 1 mole of gas
- Specific heat capacity at constant volume
 .
. - Specific heat capacity at constant pressure of a rigid diatomic is given as
 .
.
- Ratio of specific heats γ=Cp/Cv= (7/5).
Specific Heat of Diatomic gases (non-rigid)
A non-rigid diatomic gas has translational, rotational as well as vibrational degrees of freedom.
There will be 3 translational degrees of freedom and 2 rotational degrees of freedom and 1 vibrational degree of freedom.
- Total contribution by translational =
 , rotational
, rotational  and vibrational =
and vibrational = - Total contribution from 6 degree of freedom =

- Total Internal energy for 1 mole
 Specific heat at constant volume Cv=dU/dT = (7/2) R.
Specific heat at constant volume Cv=dU/dT = (7/2) R.
Specific heat at constant pressure Cp=Cv+R= (9/2) R.
Ratio of specific heat γ= Cp/Cv = (9/7)
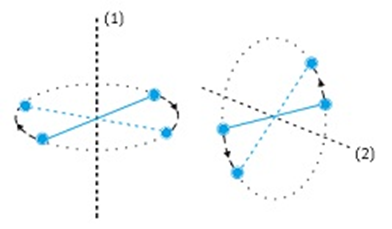
There are two independent axes of rotation (1) and (2) normal to the axis joining the two oxygen molecule. It has 3 translational and 2 rotational degrees of freedom
Specific Heat Capacity for polyatomic gases
Polyatomic gases will have 3 translational degree of freedom, 3 rotational degrees of freedom and ‘f’ number of vibrational modes.
- Total internal energy of 1 mole of gas = ((3/2) + (3/2) +f) RT = (3 + f) RT.
- Specific heat at constant volume Cv=dU/dT = (3 + f) R
- Specific heat at constant pressure Cp=CV+R=(4 + f) R
- Ratio of specific heat γ= Cp/CV = (4 + f)/(3 + f)
Specific Heat Capacity for solids
Consider there are N atoms in a solid. Each atom can oscillate about its mean position. Therefore vibrational degree of freedom = kBT
- In one-dimensional average energy=kBT, in three-dimensional average energy =3kBT
- Therefore total internal energy (U) of 1 mole of solid = 3KBTxNA = 3RT
- At constant pressure, ΔQ = ΔU + PΔV change in volume is very less in solids .Therefore ΔV = 0. So we have finally ΔQ = ΔU for solids.
- Specific heat at constant volume

- Specific heat at constant pressure
 as ΔQ = ΔU, Therefore CV=dU/dT=3R
as ΔQ = ΔU, Therefore CV=dU/dT=3R - Therefore CP = CV = 3R
Specific Heat Capacity of water
Consider water as solid, so it will have ‘N’ number of atoms. Therefore for each atom average energy =3kBT
- Number of molecules in H2O= 3 atoms.
- Total internal energy
- CV = CP = 9R.
Conclusion on Specific heat
- According to classical mechanics, the specific heat which is calculated based on the degree of freedom should be independent of temperature.
- However
- This shows classical mechanics is not enough; as a result quantum mechanics came into play.
- According to quantum mechanics minimum non-zero energy is required for a degree of freedom to come into play.
- Specific heats of all substances approach zero as
Mean free path
Mean free path is the average distance between the two successive collisions.
Inside the gas there are several molecules which are randomly moving and colliding with each other. The distance which a particular gas molecule travels without colliding is known as the mean free path.
Expression for mean free path
Consider each molecule of gas is a sphere of diameter (d).The average speed of each molecule is
Suppose the molecule suffers collision with any other molecule within the distance (d). Any molecule which comes within the distance range of its diameter will have a collision with that molecule.
The volume within which a molecule suffers collision
Let number of molecules per unit volume =n
Therefore the total number of collisions in time Δt
Rate of collision ![]() =
=
Suppose time between collision
Average distance between collision =
Mean free path (l) = ![]() .
.
Conclusion: - Mean free path depends inversely on:
- Number density (number of molecules per unit volume)
- Size of the molecule.
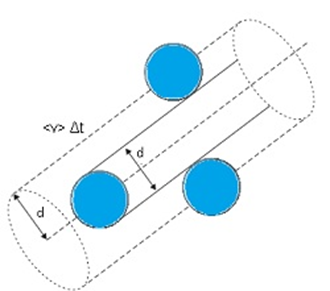
The volume swept by a molecule in time Δtin which any molecule will collide with it.
2. Energy of SHM and to oscillations
Simple Harmonic Motion and Uniform Circular motion
Tie a ball to the end of a string and make it move in a horizontal plane about a fixed point with a constant angular speed. The ball would then perform a uniform circular motion in the horizontal plane.

The displacement of the particle in a uniform circular motion can be represented by an oscillating function using either sine or cosine function. Like in the figure given below, displacement of the particle in a uniform circle is represented by sine function .

As the particle is moving in the same way the projections are also moving.
- When the particle is moving in the upper part of the circle then the projections start moving towards the left.
- When the particle is moving in the lower part of the circle then the projections are moving towards the right.
- We can conclude that the particle is swinging from left to right and again from right to left. This to and fro motion is SHM.
Velocity and acceleration in SHM
Velocity in SHM
The speed v of a particle in a uniform circular motion, its angular speed ω times the radius of circle A.


The direction of velocity v at a time t is along the tangent of the circle at the point where the particle is located at that instant. From the geometry of the given figure. It is clear that the velocity, of the projection particle P at time t.
When the displacement of the particle is given as ![]()
Where the negative sign shows the direction of v(t) is opposite to the +ve direction of the axis.
Acceleration in SHM: The instantaneous acceleration of the particle in SHM is given by ![]()
Acceleration is always directed towards the equilibrium position.
The magnitude of the acceleration is minimum at equilibrium position and maximum at extremes.
Energy in SHM
The Kinetic and Potential energies in an SHM vary between 0 and their maximum values.

Kinetic energy, potential energy and the total energy is a function of time in the above graph. BothKinetic energy and potential energy repeats after time T/2.

Kinetic energy, potential energy and total energy is a function of displacement in the above graph.
The kinetic energy (K.E.) of a particle executing SHM can be defined as
![]() , where
, where
![]() )
)
The above expression is a periodic function of time, being zero when the displacement is maximum and maximum when the particle is at the mean position.
The potential energy (U) of a particle executing simple harmonic motion is,
![]()
The potential energy of a particle executing simple harmonic motion is also periodic, with period T/2, being zero at the mean position and maximum at the extreme displacements.
Total energy of the system always remains the same
T.E.= P.E+ K.E. ![]()
The above expression can be written as ![]()
Total energy is always constant
Simple Pendulum
A simple pendulum is defined as an object that has a small mass (pendulum bob), which is suspended from a wire or inextensible string having negligible mass and suspended from a fixed support.
- The vertical line passing through the fixed support is the mean position of a simple pendulum.
- The vertical distance between the point of suspension and the center of mass of the suspended body (when it is in the mean position) is called the length of the simple pendulum denoted by L.
- When the pendulum bob is displaced it oscillates on a plane about the vertical line through the support.
- Simple pendulum can be set into oscillatory motion by pulling it to one side of equilibrium position and then releasing it.

In the above image one end of a bob of mass, m is attached to a string of length L and another to rigid support executing simple harmonic motion.
Time Period of Simple Pendulum
A point mass M is suspended from the end of a light inextensible string whose upper end is fixed to a rigid support. The mass is displaced from its mean position.
Assumptions:
- There is negligible friction from the air and the system
- The arm of the pendulum does not bend or compress and is massless
- The pendulum swings in a perfect plane
- Gravity remains constant


Free, Damped and forced oscillations
Free Oscillation A system capable of oscillating is said to be executing free oscillations if it vibrates with its own natural frequency without the help of any external periodic force. For example Oscillation of a tuning fork when struck on a rubber band, the oscillation of a simple pendulum when displaced from its mean position etc.
Damped Oscillation: Damped oscillation refers to the type of vibration of a body whose amplitude keeps on decreasing with time.
- In this type of vibration, the amplitude decreases exponentially because of damping forces like frictional force, viscous force etc.
- Because of the decrease in amplitude, the energy of the oscillator also keeps on decreasing exponentially.

Forced Oscillation:
When a system (like a simple pendulum) is displaced from its equilibrium position and released. It oscillates with its natural frequency ‘w’ and the oscillations are called free oscillations. But they die out eventually due to damping force. However, they can be maintained by an external agency.
Forced oscillation refers to the type of vibration in which a body vibrates under the influence of an external periodic force.

Resonance
When a body oscillates with its own natural frequency f0 with the help of an external periodic force whose frequency ‘f’ is equal to the natural frequency of the body, the oscillation of the body is called resonance.
- This is the condition of resonance. If accidentally the forced frequency happens to be close to one of the natural frequencies of the system, the amplitude of oscillation will shoot up (resonance), resulting in the possible destruction.
- This is the reason why soldiers go out of step while crossing a bridge else the frequency of steps may equal the natural frequency of the bridge which may result in the breaking of the bridge due to resonance
2. Reflecting and standing waves
Reflection of waves
Reflection of waves is the change in the direction of a wave upon striking the interface between two materials. When a wave strikes any interface between any two mediums the bouncing back of the wave is termed a reflection of waves.
The interface can be categorized into 2 types:
Open boundary: - When a wave strikes an interface in the case of open boundary it will get reflected as well as refracted.
Closed boundary or a rigid boundary: - When a wave is an incident on an interface it will completely get reflected. Example:-Wave striking wall (echo)
Reflection at the rigid boundary
Consider a string which is fixed to the wall at one end. When an incident wave hits a wall, it will exert a force on the wall.
By Newton’s third law, the wall exerts an equal and opposite force of equal magnitude on the string.
Since the wall is rigid, the wall won’t move, therefore no wave is generated at the boundary. This implies the amplitude at the boundary is 0.
As both the reflected wave and incident wave are completely out of phase at the boundary. Therefore φ=π.
Therefore, the incident wave is yi(x, t) = a sin (kx – ωt),
Reflected wave is yr(x, t) = a sin (kx + ωt + π) = – a sin (kx + ωt)
By superposition principle y= yi + yr =0
Conclusion: -
The reflection at the rigid body will take place with a phase reversal of π or 180.
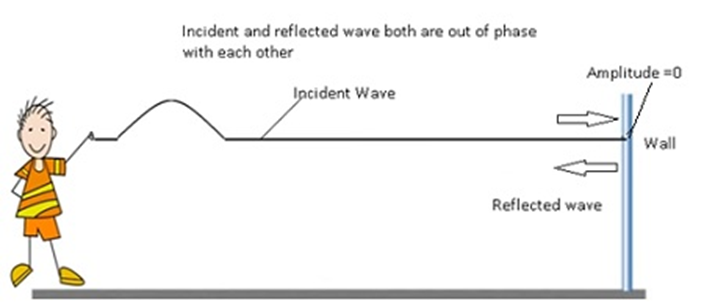
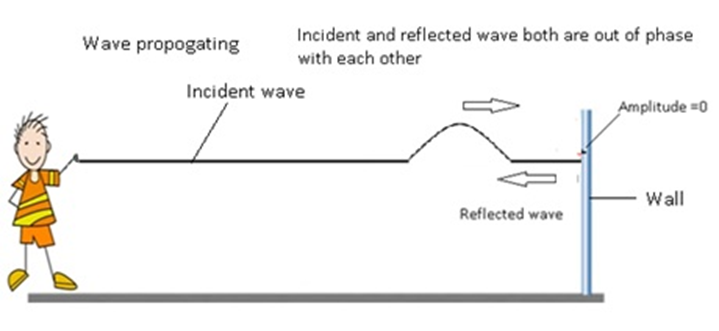
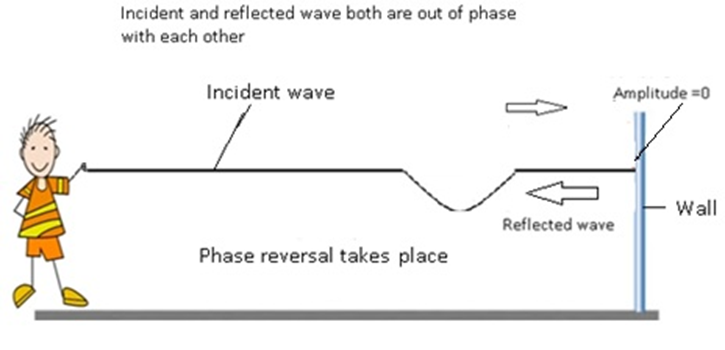
Reflection at the open boundary
The reflection at an open boundary will take place without any phase change. In this case, a boundary pulse is generated. Therefore amplitude at the boundary is maximum.
- This means the reflected wave and incident wave are in phase with each other. As a result the phase difference φ=0.
- Therefore, the incident wave is yi(x, t) = a sin (kx – ωt),
- Reflected wave is yr(x, t) = a sin (kx – ωt).
- By superposition principle y= yi + yr =2a sin (kx – ωt)
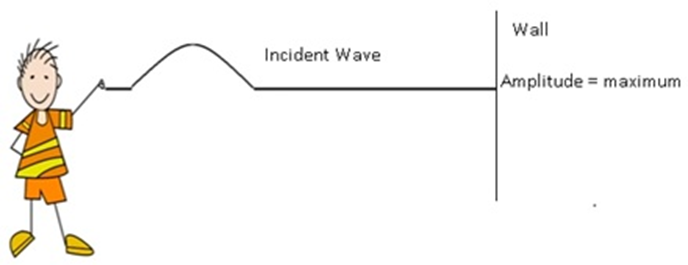
Standing wave
A stationary wave is a wave which is not moving, i.e. it is at rest.
When two waves with the same frequency, wavelength and amplitude traveling in opposite directions will interfere they produce a standing wave.
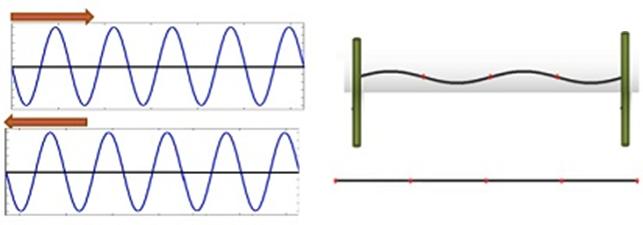
Conditions to have a standing wave: - Two traveling waves can produce a standing wave if the waves are moving in opposite directions and they have the same amplitude and frequency.
- At certain instances when the peaks of both the waves will overlap. Then both the peaks will add up to form the resultant wave.
- At certain instances when the peak of one wave combines with the negative of the second wave . Then the net amplitude will become 0.
- As a result, a standing wave is produced. In the case of a stationary wave, the waveform does not move.
Mathematically,
- Wave travelling towards left yl(x,t) =a sin(kx– ωt) and towards right yr(x,t) =a sin (kx + ωt)
The principle of superposition gives, for the combined wave
y (x, t) = yl(x, t) + yr(x, t) = a sin (kx – ωt) + a sin (kx + ωt)
Y(x, t) = (2a sin kx) cos ωt (By calculating and simplifying)
The above equation represents the standing wave expression.
Amplitude = 2a sin kx.
- The amplitude is dependent on the position of the particle.
- The cos ωt represents the time-dependent variation or the phase of the standing wave.
Below is the difference between traveling/progressing waves and standing waves
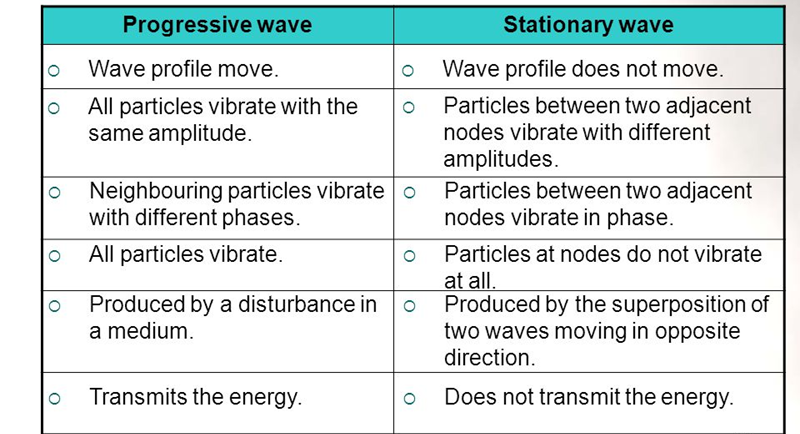
Nodes and Antinodes of Standing Wave
The amplitude of a standing wave doesn’t remain the same throughout the wave. It keeps on changing as it is a function of x.
At certain positions the value of the amplitude is maximum and at certain positions, the value of the amplitude is 0.
- Nodes: - Nodes represent the positions of zero amplitude.
- Antinodes: - Antinodes represent the positions of maximum amplitude.
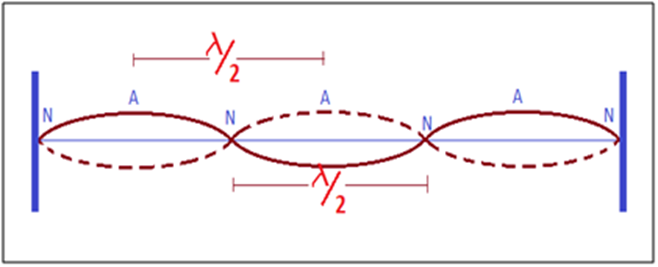
Characteristics of standing wave:
- There are certain points in the medium in a standing wave, which are permanently at rest; these are called nodes. The distance between two consecutive nodes is
- There are certain points in standing waves that have maximum amplitude. These are called antinodes. The distance between two consecutive antinodes is also
- The wavelength and the time period of the stationary waves is the same as that of the component waves by which it is formed.
Nodes and Antinodes: system closed at both ends
System closed at both ends means both ends are rigid boundaries.
Whenever there is a rigid body there is no displacement at the boundary. This implies the boundary amplitude is always 0. Nodes are formed at the boundary.
Standing waves on a string of length L fixed at both ends have restricted wavelength. This means the wave will vibrate for certain specific values of wavelength.
At both ends, nodes will be formed, so Amplitude=0.
Expression for node x = (nλ)/2.This value is true when x is 0 and L.
When x=L:- L=(nλ)/2 =>λ=(2L)/n ; n=1,2,3,4,…..
λ cannot take any value but it can take values that satisfy λ= (2L)/n this expression.
That is why we can say that the standing wave on a string which is tied on both ends has a restricted wavelength. As the wavelength is restricted therefore wavenumber is also restricted.
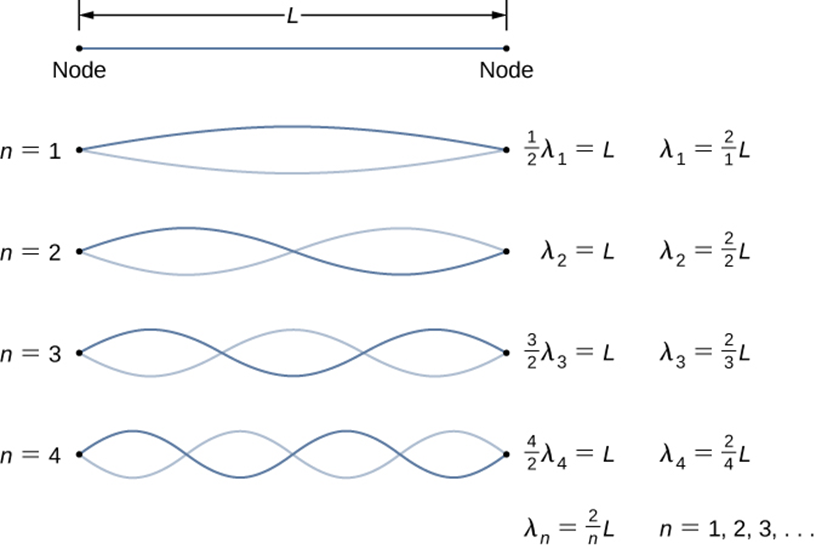
Here n=1 is a fundamental mode of vibration (first harmonics)
Similarly n= 2, 3, and 4 are called second, third and fourth harmonics respectively and so on.
Frequency =velocity / wavelength
Corresponding frequencies which a standing wave can have is given as:
![]()
Where v= speed of the traveling wave. These frequencies are known as natural frequencies or modes of oscillations.
Vibrations of Air Column
The vibrating air column in organ pipes is a common example of stationary waves. An organ pipe is a cylindrical tube which may be closed (at one end) or open at both ends (open organ pipe).
If the air in the pipe at its open end is made to vibrate longitudinal waves are produced. These waves travel along the pipe towards its far end and are reflected back. Thus due to the superposition of incident and reflected waves, stationary waves are formed in the pipe.
Closed organ pipe
If one end of the pipe is closed, the reflected wave is 180 degrees out of phase with the incoming wave. This displacement of the small volume elements at the closed end must always be zero. Hence the closed end must be a displacement node.
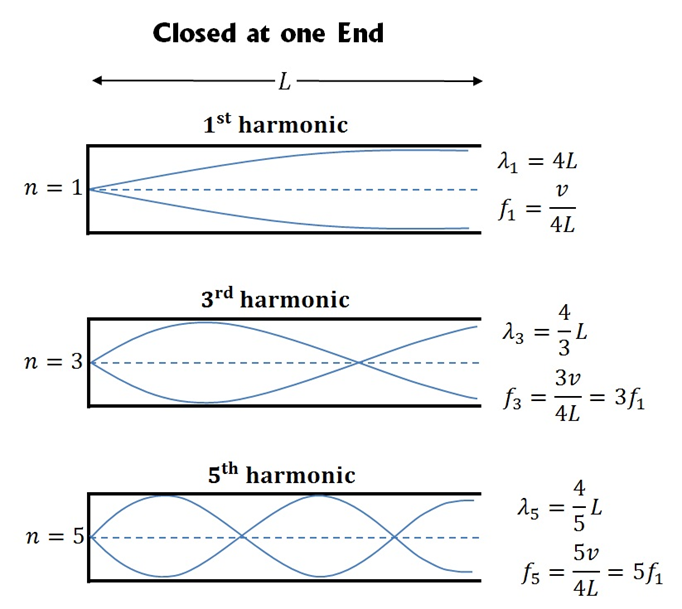
Open organ pipe
If both ends of the pipes are open and the system of air is directed against an edge, standing longitudinal waves can be set up in the tube. The open end has displacement antinodes
Various modes of vibration of air column in an open organ pipe are shown below
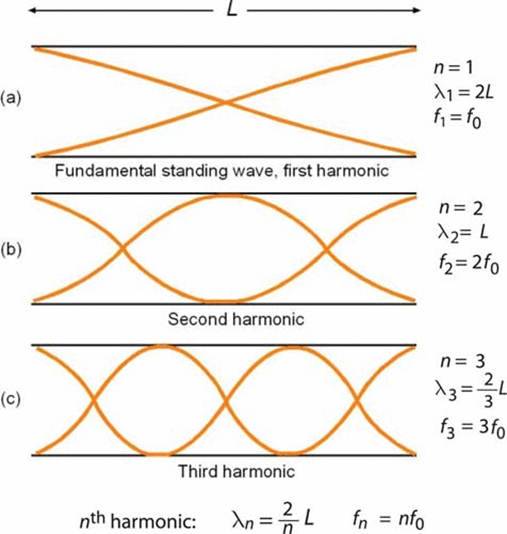
Beats
This phenomenon arises from the interference of waves having nearly the same frequencies.
The periodic variation on the intensity of the sound wave caused by the superposition of two sound waves of nearly the same frequencies and amplitude traveling in the same direction are called beats.
One rise and one fall in the intensity of sound constitute one beat and the number of beats per second is called beat frequency.
The frequency of two sources or two waves should not differ by more than 10 Hz, because if it is more than rising and fall in intensity of sound due to persistence of hearing.
If f1 and f2 are the frequencies of the two waves such that (f1 > f2) the
Beat frequency f beat = f1 - f2
Doppler’s Effect
Doppler Effect is the phenomenon of motion-related frequency change.
Consider if a truck is coming from a very far-off location as it approaches our house, the sound increases and when it passes our house the sound will be maximum. And when it goes away from our house the sound decreases. This effect is known as the Doppler Effect.
In other words, the apparent change in frequency heard by the observer due to relative motion between source and the observer is known as the Doppler Effect.
A person who is observing is known as Observer and the object from which the sound wave is getting generated is known as Source.
When the observer and source come nearer to each other as result waves get compressed. Therefore wavelength decreases and frequency increases.
Doppler Effect will be analyzed under three cases.
Case 1:- Observer is stationary but the source is moving.
Case 2:-Observer is moving but the source is stationary.
Case 3:- Both the observer and the source are moving.