 Madhava Publications
Madhava Publications
1. Physics-Scope and excitements
Introduction : What is Science?
Science is a systematic understanding of natural phenomena in detail so that it can be predicted, controlled and modified. Science involves exploring, experimenting and speculating phenomena happening around us.
The word Science is derived from the Latin verb Scientia meaning ‘to know.
The scientific method is a way to gain knowledge in a systematic and in-depth way. It involves:
-
- Systematic observation
- Controlled experiments
- Qualitative and Quantitative reasoning
- Mathematical modeling
- Prediction and verification (or falsification) of theories
- Speculation or Prediction
Natural Sciences
Natural science is a branch of science concerned with the description, prediction, and understanding of natural phenomena, based on observational and empirical evidence. It consists of the following disciplines:
- Physics
- Chemistry
- Biology
What is physics?
Physics is the study of nature and laws. There are so many different events in nature that are taking place and we expect that all these different events in nature are taking place according to some basic law and revealing these laws of nature from the observed events is Physics.
Humans have always been curious about the world around them. The night sky with its bright celestial objects has fascinated humans since time immemorial. The regular repetitions of the day and night, the annual cycle of seasons, the eclipse, the tides, the volcanoes, the rainbows, the color of the sky during sunrise and sunset have always been a source of wonder. All these phenomena are explained by the laws of Physics.
Word Physics has been originated from the Greek word phusikḗ which means nature.
There are two principal kinds of approaches in Physics which are listed below:
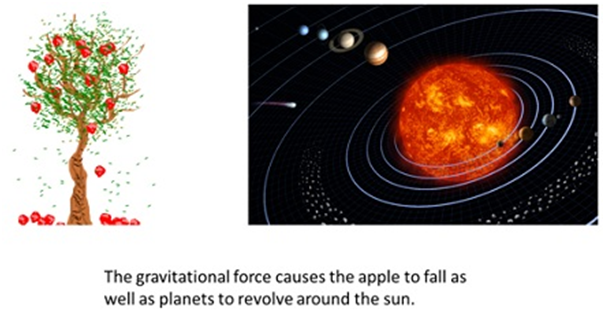
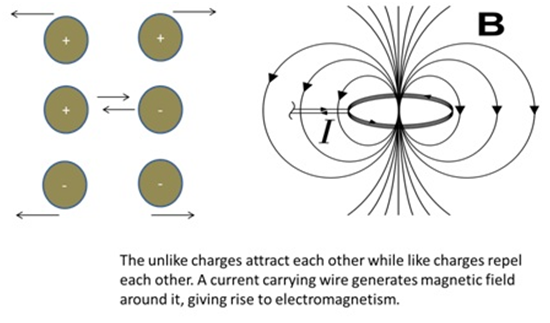
1. Unification: This is a method including all of the phenomena in the world in the form of a group of universal laws in various domains and conditions. The law of gravitation will be applied both on a falling apple from a tree and the movement of planets around the sun can be considered as examples. Every electric and magnetic phenomenon will be controlled by Electromagnetism laws.
2. Reduction: This is a method for deriving characteristics of complex systems from the properties and interaction of their constituent parts. We can take an example that the temperature studied under thermodynamics can be also connected to the average kinetic energy of molecules in a system (kinetic theory).
Role of Mathematics in Physics :
Description of all-natural phenomena is made simple by the help of mathematics. Thus we can say that mathematics is the language of Physics. With the help of Mathematics, we explain and understand the basic laws of physics in a better way.
Scope of Physics
Scope of Physics will be wide since it covers quantities with length magnitudes as big as
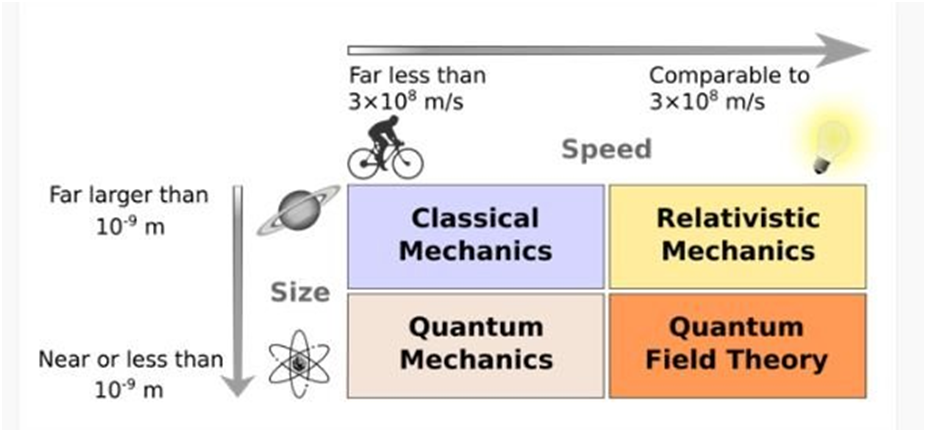
Physics can be categorized broadly into two kinds on the basis of its scope - Classical Physics and Modern Physics.
Basically, there are two domains of interest: macroscopic and microscopic. The macroscopic domain includes phenomena at the laboratory, terrestrial and astronomical scales. The microscopic domain includes atomic, molecular and nuclear phenomena.
Classical physics is a branch which is dealing with macroscopic phenomena while modern physics will be dealing with macroscopic phenomena.
Macroscopic Domain
The macroscopic domain includes phenomena at large scales like a laboratory, terrestrial and astronomical. It includes the following subjects:
1. Mechanics – It is based on Newton’s laws on motion and the laws of gravitation. It is concerned with the motion/equilibrium of particles, rigid and deformable bodies and the general system of particles.
Examples: Propulsion of rocket by ejecting gases, Water/Sound waves, Equilibrium of bent rod under a load etc.
2. Electrodynamics – It deals with electric and magnetic phenomena associated with charged and magnetic bodies.
Examples: motion of a current-carrying conductor in a magnetic field, the response of a circuit to an ac voltage (signal), the propagation of radio waves in the ionosphere etc.
3. Optics – It deals with phenomena involving light.
Examples, Reflection and refraction of light, Dispersion of light through a prism, Colour exhibited by thin films etc.
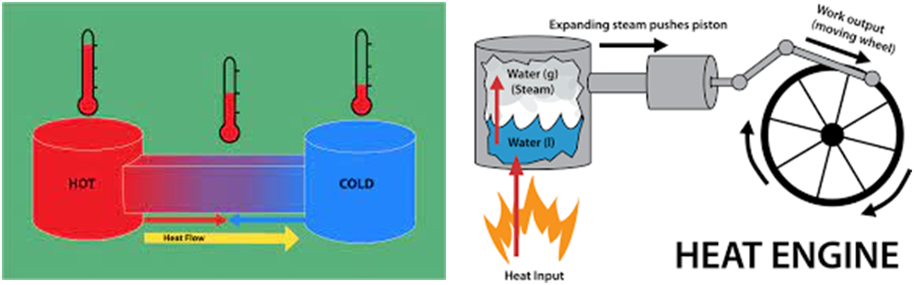
4. Thermodynamics – It deals with systems in macroscopic equilibrium and changes in internal energy, temperature, entropy, etc. of systems under the application of external force or heat.
Examples: Efficiency of heat engines, thermal expansion, Direction of physical and chemical process etc.
Microscopic domain
Microscopic Domain
The domain includes phenomena at minuscule scales like atomic, molecular and nuclear. It also deals with the interaction of probes like electrons, photons
and other elementary particles. Quantum theory has been developed to handle these phenomena.
Physics is exciting in many ways. To some people, the excitement comes from the elegance and universality of its basic theories, from the fact that a few basic concepts and laws can explain phenomena covering a large range of magnitude of physical quantities. To some others, the challenge in carrying out imaginative new experiments to unlock the secrets of nature, to verify or refute theories, is thrilling. Applied physics is equally demanding.
Factors responsible for the progress of Physics
- Quantitative analysis along with qualitative analysis.
- Application of universal laws in different contexts.
- Approximation approach (complex phenomena broken down into a collection of basic laws).
- Extracting and focusing on essential features of a phenomenon.
Hypothesis, Axiom and Models
A hypothesis is a supposition without assuming that it is true. It may not be proved but can be verified through a series of experiments.
Axiom is a self-evident truth that is accepted without controversy or question.
Model is a theory proposed to explain observed phenomena.
The assumption is the basis of physics, where a number of phenomena can be explained. These assumptions are made from experiments, observation and a lot of statistical data.
Physics-Technology and society
With the advancement of technology, human civilization also advanced.
For example, with technological advancement, steam engines are invented and then various industries are set up and an industrial revolution happens which in turn changed human civilization.

There is a complementing relationship between physics and technology. Sometimes physics gives rise to new technology and sometimes new technology gives rise to new physics.
For example, the advancement of the research of semiconductor materials which made it possible to make transistors, chips and integrated circuits which later contributed to the technological advancement of modern computers. In this example, Physics is giving rise to new technology.
Now with the advancement in technology of accelerators and detectors, it allows us to penetrate deeper in the atomic level and give rise to microphysics like nuclear physics, atomic physics, particle physics etc. In this example, the advancement in technology gave rise to new physics.
Technological Applications of Physics:
There are numerous examples in which Physics and its concepts paved the way to inventions as mentioned below.
- The steam engine was invented during the industrial revolution in the eighteenth century.
- Development of wireless communication after the discovery of the laws of electricity and magnetism.
- Neuron-induced fission of uranium, attempted by Hahn and Meitner in 1938, showed the formation of nuclear power reactors and nuclear weapons.
- Electricity has been produced from solar, wind, geothermal etc. energy.
Fundamental forces in Nature
Fundamental Forces in nature
The forces which we see in our day-to-day life like muscular, friction, forces due to compression and elongation of springs and strings, fluid and gas pressure, electric, magnetic, interatomic and intermolecular forces are derived forces as their originations are due to a few fundamental forces in nature.
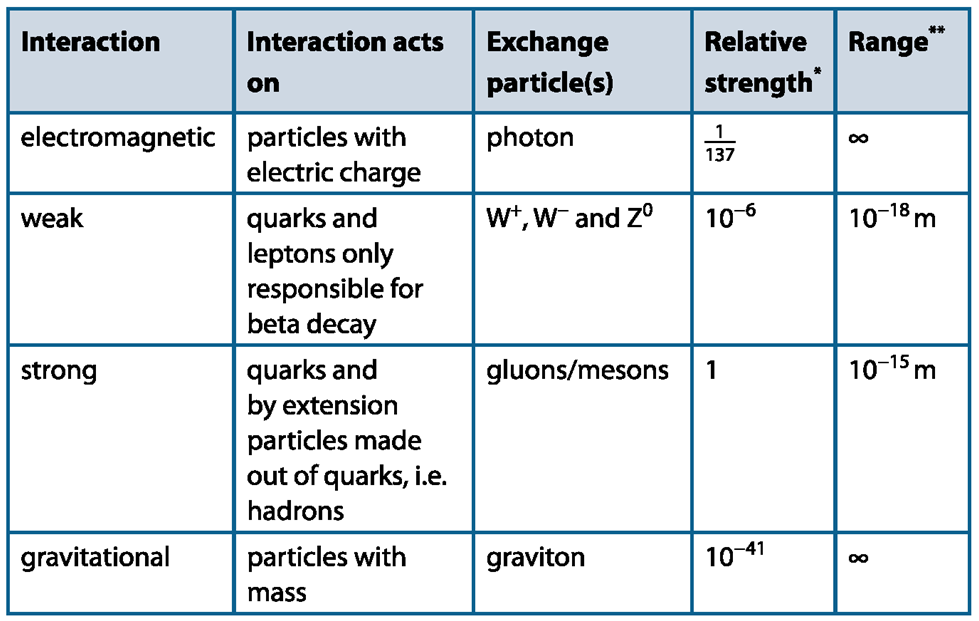
A few fundamental forces are:
- Gravitational Force: It is the force of mutual attraction between any two objects by virtue of their masses. It is a universal force as every object experiences this force due to every other object in the universe.
- Electromagnetic Force: It is the force between charged particles. Charges at rest have electric attraction (between unlike charges) and repulsion (between like charges). Charges in motion produce magnetic force. Together they are called Electromagnetic Force.
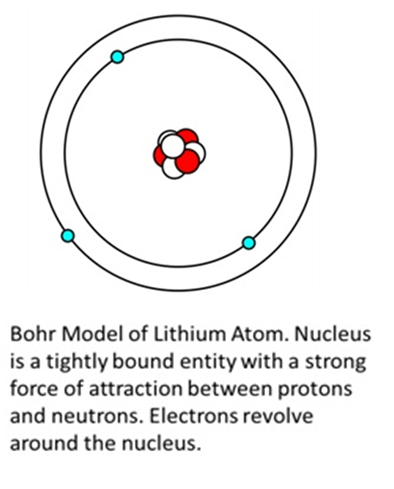
- Strong Nuclear Force: It is the attractive force between protons and neutrons in a nucleus.It is charge-independent and acts equally between a proton and a proton, a neutron and a neutron, and a proton and a neutron. Recent discoveries show that protons and neutrons are built of elementary particles, quarks.
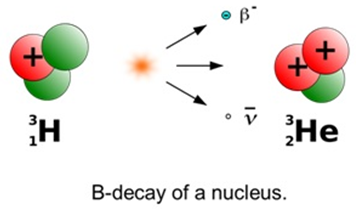
- Weak Nuclear Force: This force appears only in certain nuclear processes such as the β-decay of a nucleus. In β-decay, the nucleus emits an electron and an uncharged particle called the neutrino. This particle was first predicted by Wolfgang Pauli in 1931.
Below table shows the difference between the above forces.
Conserved Quantities:
Physics has provided laws for summarising the investigations and observations of the phenomena happening in the universe.
- Physical quantities will be held fixed with time and can be defined as conserved quantities. In the case of a body under external force, the kinetic and potential energy will be varying over time but the total mechanical energy (kinetic + potential) will be a constant.
- Conserved quantities will be scalar (Energy) or vector (Total linear momentum and total angular momentum)

Conservation Laws:
A conservation law can be defined as a hypothesis on the basis of observation and experiments which is not able to be proven. These are verifiable through experiments.
Law of Conservation of Energy:
- In accordance with the General Law of conservation of energy, the energies will be fixed over time and get transformed from one form to another.
- The law of conservation of energy will be applied to the whole universe and it has been considered that the total energy of the universe is fixed.
Nature develops symmetric results at a different time under similar conditions.
Law of Conservation of Mass:
It can be defined as a principle that is usable in the analysis of chemical reactions.
- Basically, a chemical reaction can be defined as a rearrangement of atoms among various molecules.
- The difference will be formed as heat and the reaction is exothermic when the total binding energy of the reacting molecules will be less than the total binding energy of the product molecules.
- The opposite will be correct for energy-absorbing reactions such as endothermic reactions.
- As the atoms are not destroyed, only just rearranged, the summation of the mass of the reactants will be identified as the total mass of the products in a chemical reaction.
- Mass will be in relation to energy through Einstein's theory,
Law of Conservation of Linear Momentum:
- Law of conservation of linear momentum can be defined as the symmetry of laws of nature with respect to translation in space.
- The law of gravitation is exactly identical on earth and moon even when the acceleration due to gravity on the moon is ⅙ than that on earth.
Law of Conservation of Angular Momentum:
Isotropy of space means that no intrinsically preferred direction in space specifies the law of conservation of angular momentum.
1. Units
Introduction:
Measurement of any physical quantity involves comparison with a certain basic, arbitrary chosen, Internationally accepted reference standard called units. Any measured quantity is expressed by a number and a unit. The units for the fundamental or base quantities are called fundamental or base units. The units of all other physical quantities can be expressed as combinations of base units are called derived units. A complete set of these units, both the base units and derived units, is known as the system of units.
Need for measurement
There is a need for measurement in physical quantity. Without it, how can you define things? By measuring a physical quantity we define the properties of a material which the physical quantity is associated with. For example, distance, speed, mass, pressure, force, momentum, and energy.
Think this yourself, what is going to be the meaning of the length of an object if we cannot measure it. We will then inform its length subjectively as ‘long’, ‘short', etc. That makes no sense anymore now.
A physical quantity is a property that can be quantified by the measurement of a material or system. A physical quantity may be represented as the combination of a unit and a numerical value. For example, by specifying methods for calculating them, we outline distance and time, while we describe average speed by stating that it is measured as traveled distance divided by travel time. Measures of physical quantities are represented in unit units, which are numerical meanings
Physical quantities haven't just existed before the dawn of mankind. We made them up to serve our own inquisitive purposes. We have discovered that there are certain properties in the world around us, which can be altered in proportions but not in nature.
Heavier. More. Higher. Stronger. These are all comparative terms. And to compare, we need a basis for measurements to take place. Because, without one, there is no logical way to distinguish between different levels or amounts of the same property.
Units of measurement
There are two types of units of measurement.
- Fundamental/ Base units
- Derived units
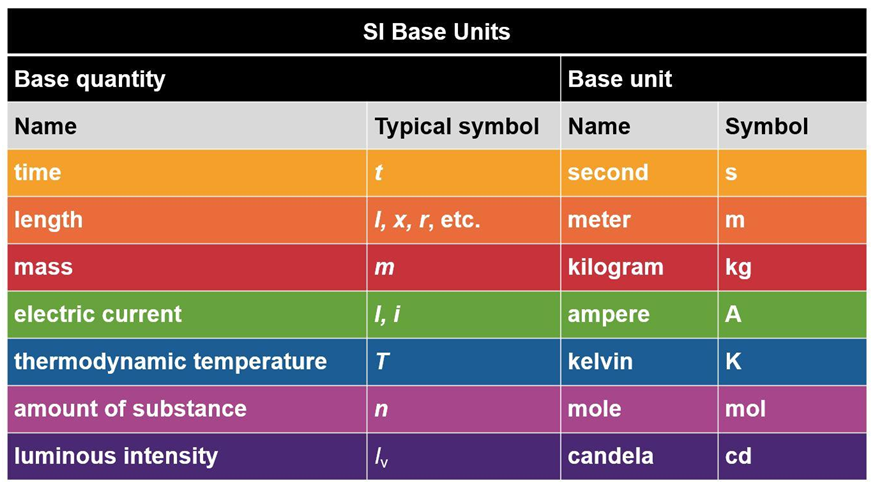
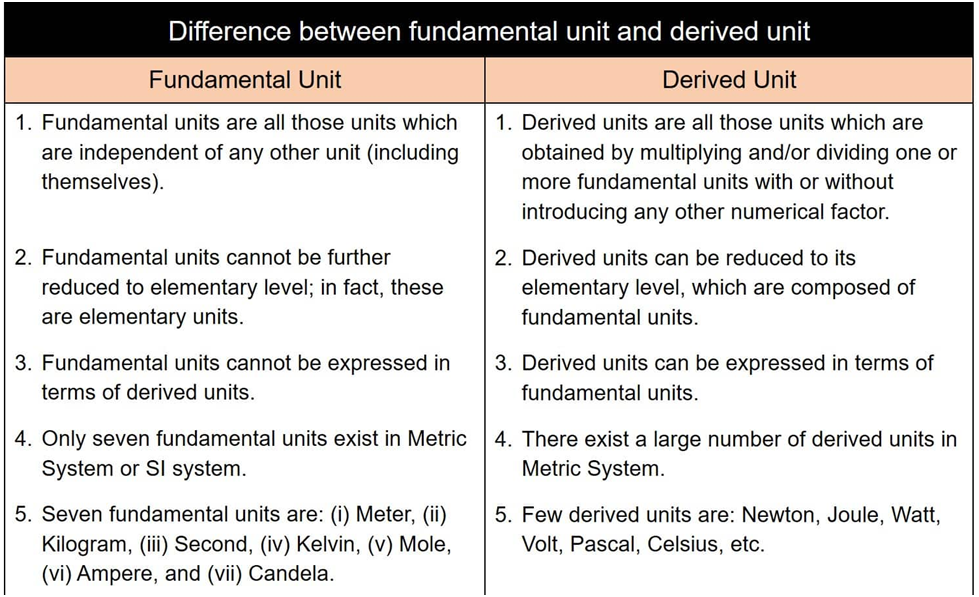
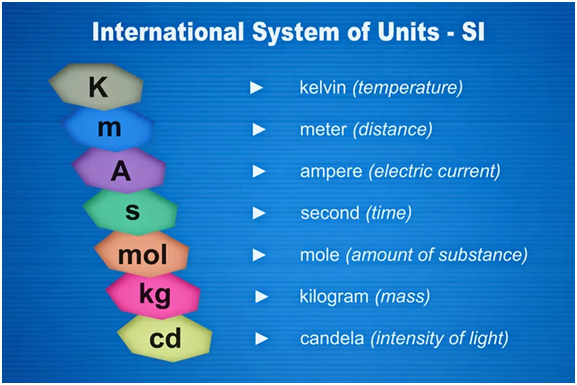
Fundamental units: The fundamental units are the base units defined by the International System of Units. These units are not derived from any other unit, therefore they are called fundamental units. There are seven fundamental units.
Derived units. The quantities that are derived using the fundamental quantities are called derived quantities. The units that are used to measure these derived quantities are called derived units. Examples: Force, Velocity, Density, Heat, Power, Energy, Momentum, Acceleration. Some derived units are given in the table below.
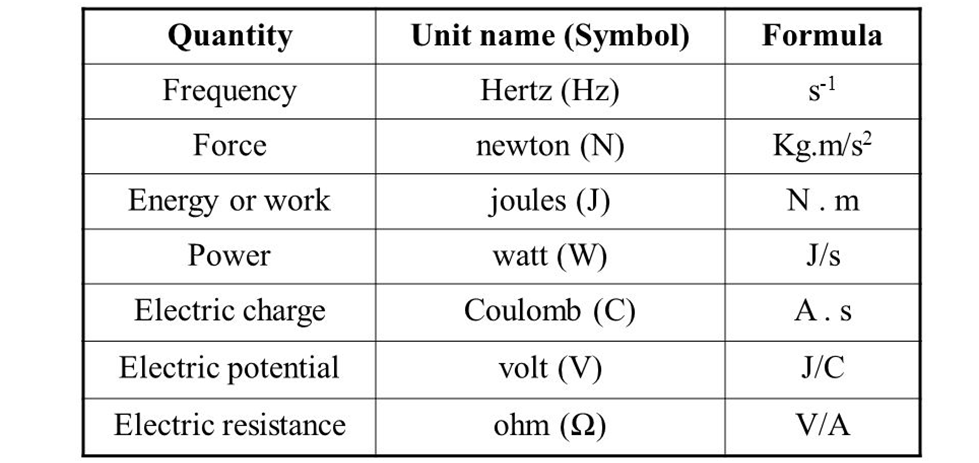
Difference between fundamental and derived units
System of units:
In earlier times scientists of different countries were using different systems of units for measurement. We have here four types of system of units, one of which is S.I units which is accepted globally.
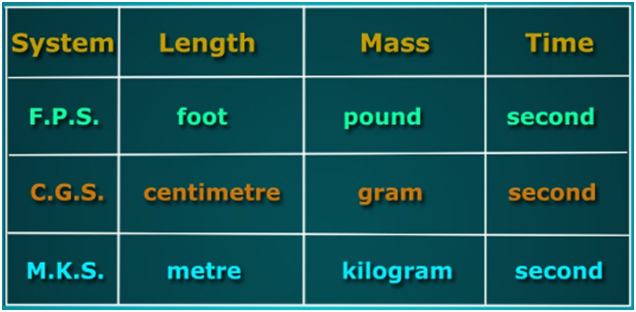
System of units are classified mainly into four types:
1. C.G.S. system: It stands for Centimetre-Gram-Second system. In this system, length, mass and time are measured in centimeters, grams and seconds respectively.
2. M.K.S. system: It stands for Metre-Kilogram-Second system. In this system, length, mass and time are measured in meters, kilograms and seconds respectively.
3. F.P.S. system: It stands for Foot-Pound-Second system. In this system, length, mass and time are measured in the foot, pound and second respectively.
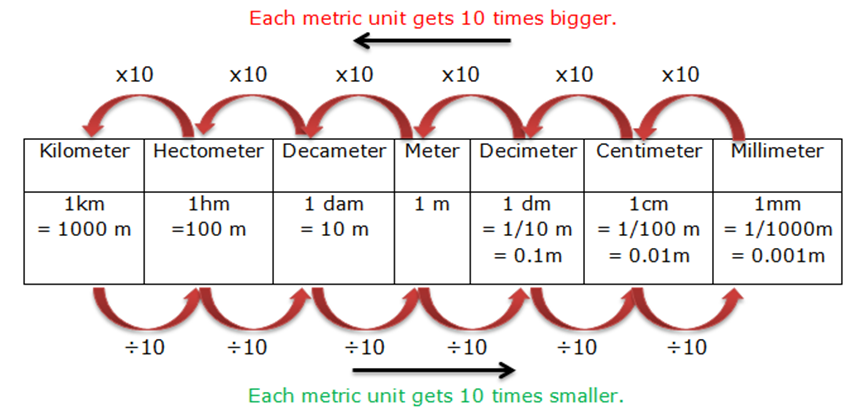
4. S.I. system: It stands for System International. This system has replaced all other systems mentioned above. It has been internationally accepted and is being used all over the world. As the SI units use a decimal system, conversion within the system is very simple and convenient.
1. Motion
Introduction

In our day-to-day life, we see the motion of various objects around us like the motion of cars, planes, sun, moon and people and things around us.
We all have a vague idea of Motion. But in this text, we will discuss this topic in detail with all the important aspects of the motion.
When the motion is confined to one dimension in a straight line we call this type of motion rectilinear motion. We will discuss this type of motion in this chapter.
You will have an idea of the state of motion and rest and I will introduce a very important concept of the frame of reference to discuss the state of rest or motion. Then we will learn about the kinematics of rectilinear motion in this unit. In kinematic we describe motion without going into the cause of the motion.
Motion and rest
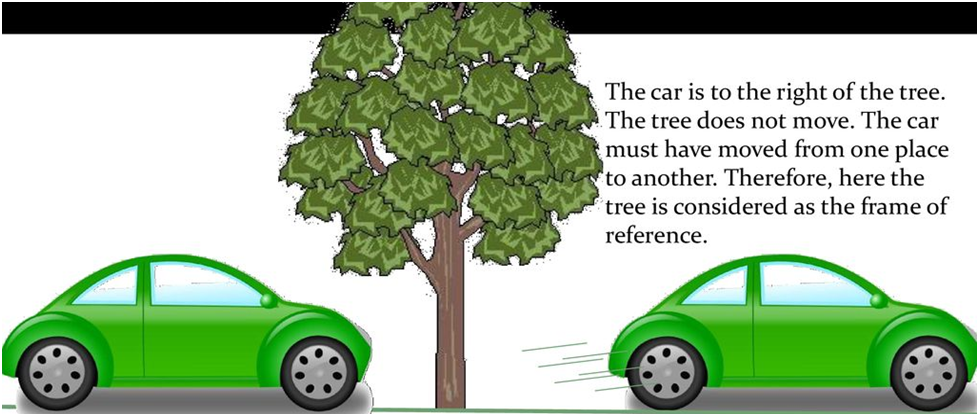
Suppose a man is sitting in a park, he sees trees and plants around him which are at rest according to him. Now another man sitting in his car passes near that park. The man sitting in the car sees all the trees and plants moving in the opposite direction of its motion. I am sure all of you must have experienced the same situation.
Now tell me who is right and who is wrong?
Do the plants and trees are at rest or in motion?
Actually here both are right. To understand this let's first try to understand how we define something to be in motion or at rest.
The fact is that there is nothing like absolute rest or absolute motion in the whole universe. One thing which is at rest according to one observer in one frame of reference may appear to be moving according to another observer in another frame of reference.
We define something to be in rest or motion with respect to some reference which is called a frame of reference.
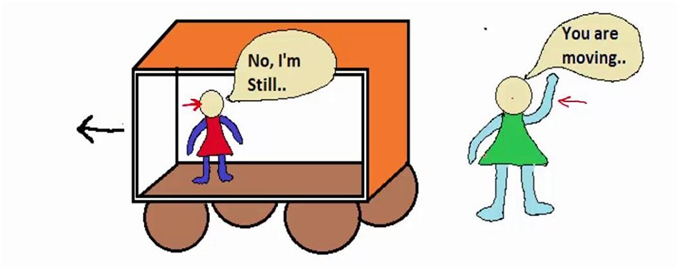
With respect to the man sitting in the park, trees and plants in the park appear to be at rest as they are not changing their position with respect to the man sitting there.
But since the man in the car is itself moving so when he crosses through the park, trees and plants are left behind with respect to him and as he moves ahead with some speed, he notices that trees appear to be moving with the same speed but in opposite directions.
We define all the motions with respect to some frame of reference.

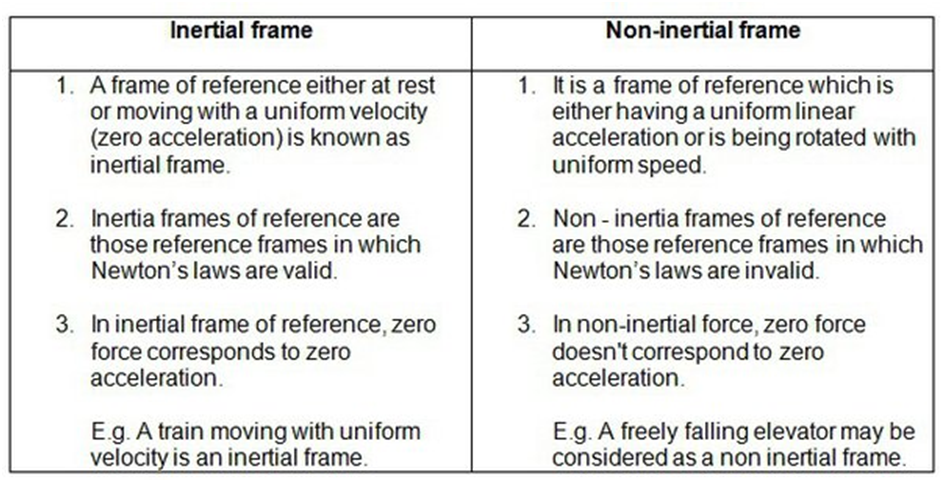
We have two types of frame of reference: Inertial and Noninertial
A body is said to be at rest if its position doesn't change with respect to its surroundings, whereas when the position of a body changes with respect to its surroundings it is said to be in motion. The state of rest or motion of a body is relative to each other.

Position, path length and displacement.
Position: To describe the position of the object, we must know and be able to describe its position.
In physics, we specify a position with the help of a reference point and a set of three mutually perpendicular axes of the rectangular coordinate system.
In this chapter we are confined to one- dimension, so we need only one axis to specify the position.
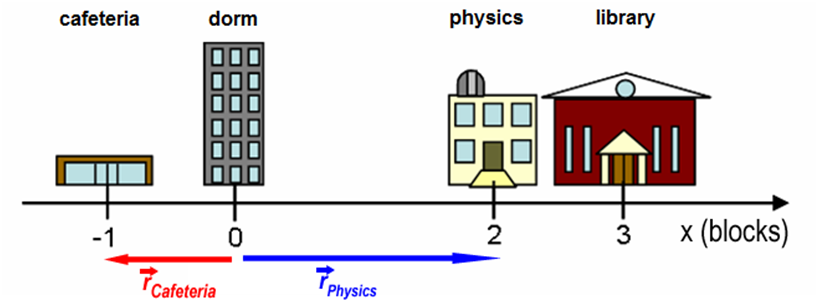
In the above example Dorm is chosen as a reference point and the position of the cafeteria, physics block and library can be described with the reference of the dorm.
- The cafeteria is 1 unit left to the dorm (x=-1)
- The physics department is 2 units right to the dorm ( x=2)
- The library is 3 units right to the dorm. (x=3)
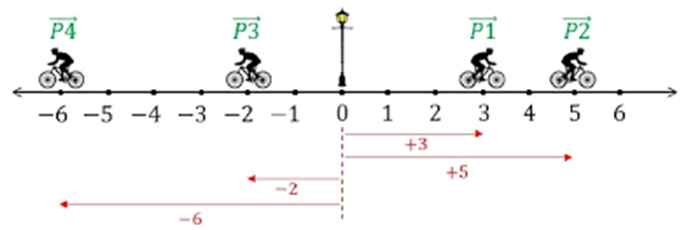
Similarly in the example below the lamp post is taken as a reference point and the position of different people is described with respect to the reference point.
Path length and displacement
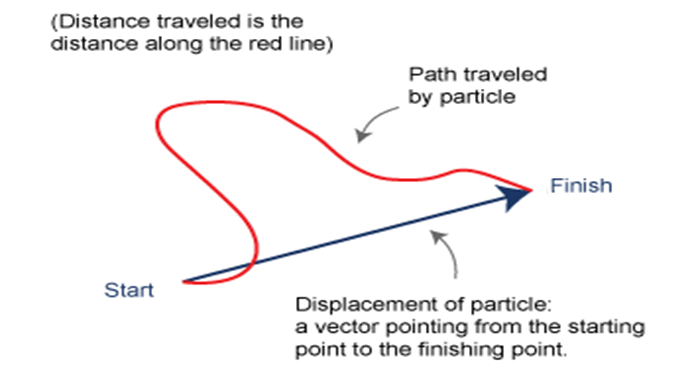
Path length or distance traveled is the length of the actual path taken by the object from the initial to the final position. In the figure given below, the red represents the actual path between the start and finish points. This is the distance traveled or path length. It is a scalar quantity.
Displacement is the shortest distance between the initial and final positions. The line represented in blue is the displacement. It is a vector quantity.
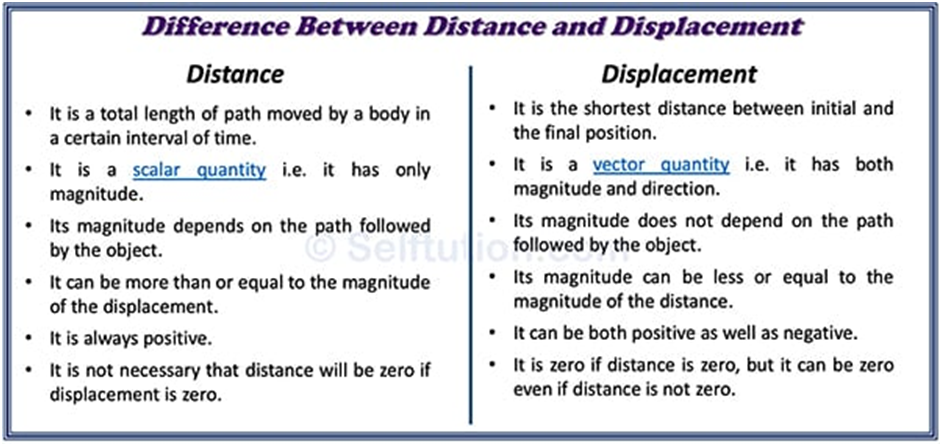
The difference between Distance and Displacement is as follows:
Uniform and non-uniform motion
The motion of the object is said to be a uniform motion if the object travels an equal distance in an equal interval of time.
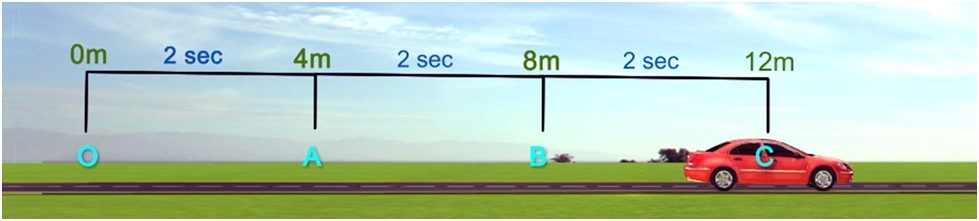
In the above example, a car C travels 4 m every 2 seconds throughout its journey, here car C is in uniform motion.
The motion of the object is said to be non-uniform motion if it travels an unequal distance in an equal interval of time
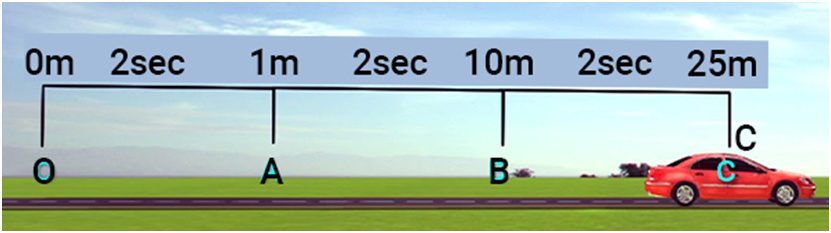
In the above example car C travels 1 m in the first second and then 9 m and 15 m in another consecutive second. So in this example, a car travels an unequal distance in an equal interval of time.
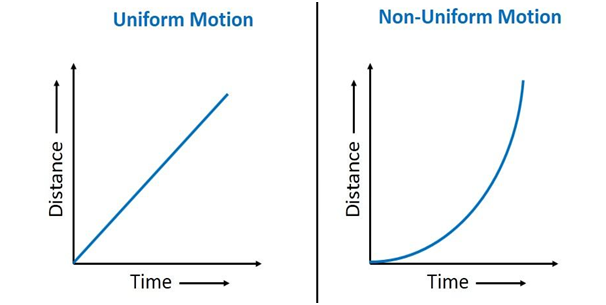
The distance-time graph of the uniform and non-uniform motion is given below
Speed and velocity
Speed: It is the rate of change of position of an object. It refers to how fast an object is moving. For example, if a bike covers 20 meters in 1 second. Then its speed will be 20 m/s. It is a scalar quantity.

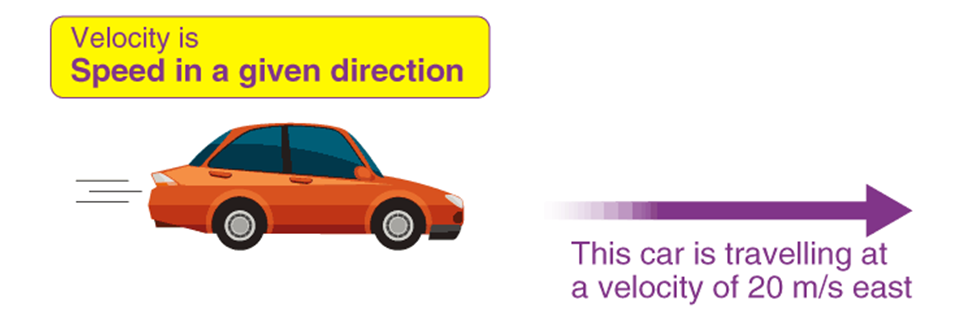
Velocity: In contrast with speed, velocity is a vector quantity and it also tells us about the rate of change of position of the object, but it is direction aware. The magnitude of velocity is speed. In other words, we can say that velocity is the speed in a given direction.
Even if the object is in motion, its velocity can be zero. This will happen when the object returns to its initial position and hence displacement is zero, so velocity will also be zero. But speed cannot be zero if the object is in motion.
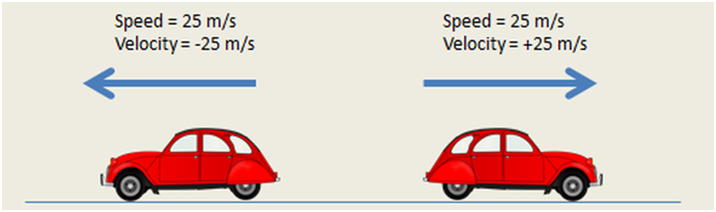
Like displacement can be negative, positive and zero, velocity can also be positive, negative and zero.
Average speed and velocity
The average speed of an object refers to the total distance it travels divided by the time which is elapsed. It is a scalar quantity.
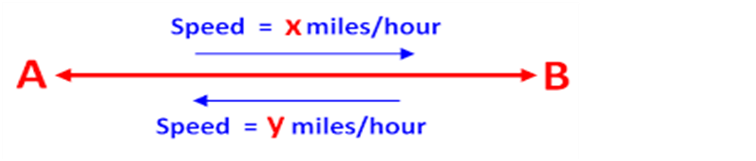
If the object travels with speed ‘x’ from A to B and returns from B to A with speed ‘y’. Then the average speed will be
Average velocity: Average velocity is the ratio of displacement to the time taken in the entire journey. The average velocity can be zero even if the average speed is not zero.
Instantaneous velocity
The instantaneous velocity of an object is the limit of the average velocity as the elapsed time approaches zero, or the derivative of x with respect to t.

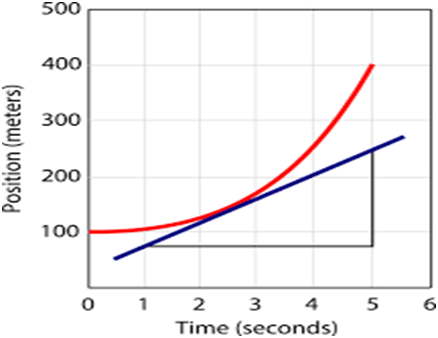
Instantaneous velocity at any point in time is the slope of the tangent of the Distance -time graph at that point.
![]()
1. vectors
Scalar and Vector quantity
There are many physical quantities in Physics. Like pressure, density, force, speed, temperature, acceleration, etc. These quantities can be classified into two categories- scalar and vector quantities.
Scalar quantities are those which have only magnitude. For example, density, temperature, distance, speed, pressure, etc and vector quantities have both magnitude and direction associated with them like force, acceleration, velocity, etc.
This section will learn about vectors and their properties in detail.
Position and displacement vector
Position vector
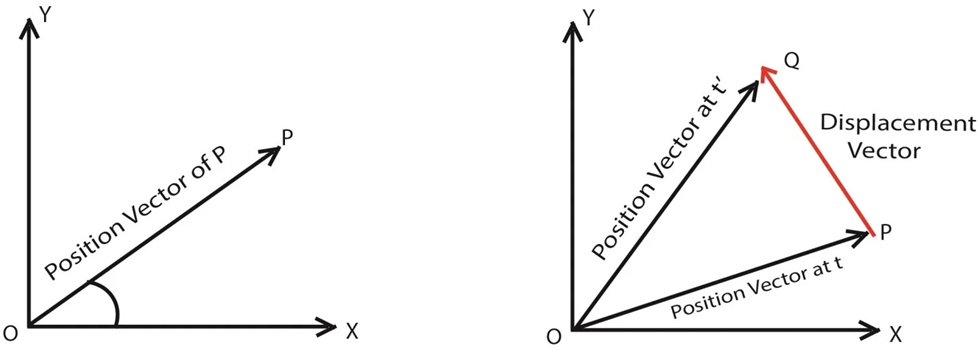
A position vector is defined as a vector that symbolizes either the position or the location of any given point with reference to the origin. The direction of the position vector always points from the origin of the vector towards the given point.
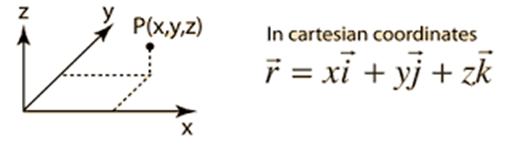
For example, Suppose an object is placed at coordinate (2, 3,4 ) in a rectangular coordinate system. The position of this point can be expressed as position vector
Displacement vector
The change in the position vector of an object is known as the displacement vector.
Suppose an object is at position A at time t=0 and after some time ‘t’ it reaches position B. Let the position of A is
(
Position vector of A = OA= (
Position vector of B= OB= (
So the displacement of AB is given by displacement vector AB
AB= OB-OA =
The displacement of an object can be defined as the vector distance between the initial point and the final point.
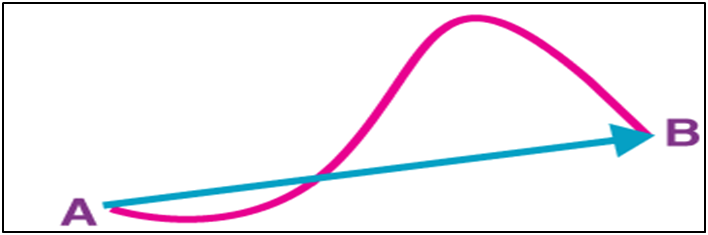
Suppose an object travels from point A to point B via curve path in pink. The displacement of the particle would be the vector line AB headed in the direction A to B. The direction of the displacement vector is always from the initial to the final position.
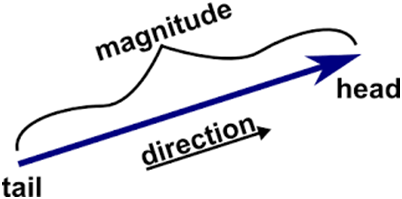
General vector and their notations
A vector has both magnitude and direction. The length of the vector represents its magnitude and the tip of the vector specifies its direction
In cartesian coordinates, we generally express a vector in 3-D in terms of its projection along the x, y and z-axis.
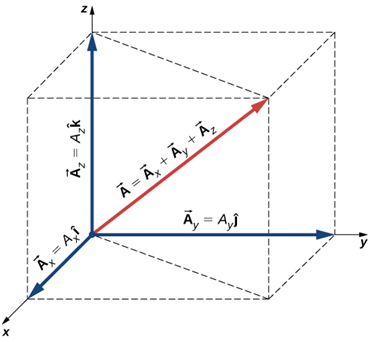
In the figure given above Vector
Here Ax, Ay and Az is the projection of vector A in direction x, y and z.
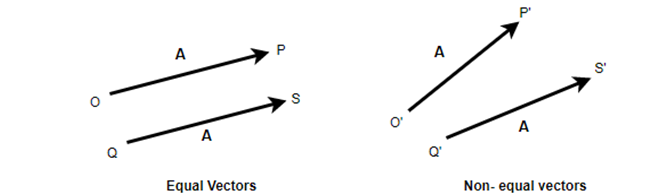
Equality of vector
Two vectors are equal if all the components of the vector are equal. In other words, if both the magnitude and direction of the vector is equal then only two vectors are equal.
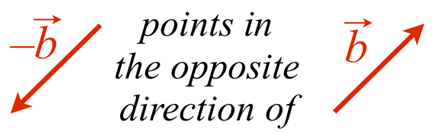
Negative of the vector: The vectors and their negatives have the same magnitude but opposite directions.
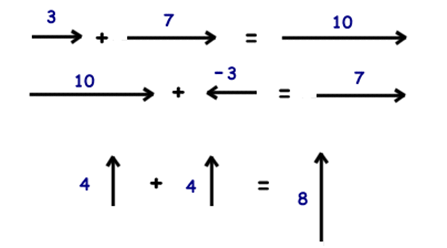
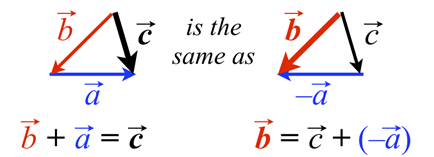
Vector addition: Always add vectors from tip to tail. Place the tip of the first vector next to the tail of the second vector. The Result is the sum of the first two vectors.
Vector subtraction: When we have to subtract two vectors : A- B = A + (-B) . Then first take the negative of the second vector and then add them according to the rule of vector addition.
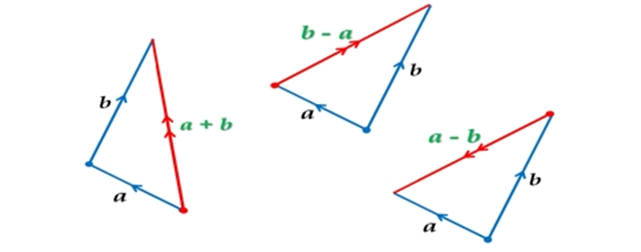
Vector addition and subtraction in 1 dimension
Vector addition subtraction in 2 dimension
1. Newton's Law
Introduction
We have discussed motion and its different kinds like uniform motion and non-uniform motion. We have discussed accelerated motion where the speed of the objects varies with time. A moving body moves faster under acceleration and could stop also. One thing which we have not discussed there is Who governs all these motions?
We have seen that magnets attract iron kept at a distance without even physical contact with it. And the moon causes tides on the earth even from such a large distance. So we can conclude that there must be an external agency that governs all these and these agencies can even affect from a distance ( gravitational force and electromagnetic force).
Concept of force
From the previous discussion, we can conclude that an external agency is required to describe what governs different kinds of motion.
We call it force!. To stop a moving object, to start a body from rest, or change the speed of the moving body, all require a force.
Now the next question is that does a force is required to keep a body moving in uniform motion?
Aristotle said that a force is required to maintain the uniform motion of the body. His statement is based on the motion of the body we see in our daily life.
When a child throws a ball with some initial speed it eventually stops after moving some distance, also a car moving at a constant speed cannot maintain its motion when we turn off the engine of the car. So someone can conclude that force is necessary to even maintain the uniform motion. But this is not correct and thus this statement is called the Aristotle fallacy.
Force is a vector quantity whose unit is Newton.
Let us first try to understand what is the correct answer to the question: does a force is required to keep a body moving in uniform motion?
The answer is No ! Force is not required for the uniform motion of the object.
The ball which is moving comes to rest later due to an external force which is a friction force acting on it, in its opposite direction. So an external force is required to cancel the friction force to maintain the uniform motion of the object.
If there is no friction then there will be no force required to maintain the uniform motion of the body.
Inertia: resistance to change
Inertia is that property of any matter by virtue of which it always resists any change in its state.
If we are habitual to wake up late in the morning and suddenly we have to wake up early for work, both the body and the mind try to resist this change.
If we have our opinion on something and then we listen to someone else's opinion about the same thing which is different from ours, then our mind tries to stick to its own opinion rather than accepting the opinion of the other.
Inertia is basically everywhere. But in this chapter, we will restrict ourselves to the concept of mechanical inertia.
Mechanical inertia is the inertia of matter by virtue of which it resists any change in its motion or rest. This concept laid the formulation of Newton’s first law.
Newton’s First law
Statement: An object which is at rest will try to remain at rest and an object which is in uniform motion will continue to do so, until and unless an external force is applied to it. This is called Newton’s first law which is also known as the law of inertia.
- When no force is acting on the object then there will be zero acceleration then the object at rest will remain at rest and an object moving with uniform speed will continue moving with uniform speed.
But we all know there is gravity everywhere on the earth and also some opposing forces like friction and viscous drag (in fluids) are present everywhere. So how could it be possible to have zero force on any object?
- Since force is a vector quantity, a force in a particular direction can be canceled by another force of the same magnitude acting in opposite direction.
- So if we have the sum of all the forces acting on an object is zero. Then also we can apply Newton’s First law as there is no net force acting on the object.
Example: A car is moving with uniform speed on the road when the external force provided by the engine of the car is exactly equal to the frictional force acting between the road and the tires of the car during motion.
A book kept in the book remains at rest as the gravitational force by the earth is balanced by the normal force from the table in the opposite direction to the gravity.
I am putting this for fun just to help to remember Newton's First Law. An object at rest will remain at rest unless acted upon by another force.
Significance of the Newton’s first law
1. When we are sitting on a bike and it suddenly starts we get a jerk in the backward direction. Similarly when a moving bike stops we experience a jerk forward. This is true for any vehicle.
Explanation: When we are sitting on a bike our lower body is in contact with the bike but the upper body is not. When the bike starts, the lower body moves with the bike but the upper body resists the change in the state of rest and thus experiences a jerk backward.
2. When we place a playing card over a glass and a coin on the car. When we push the card, the card goes away but the coin falls into the glass.
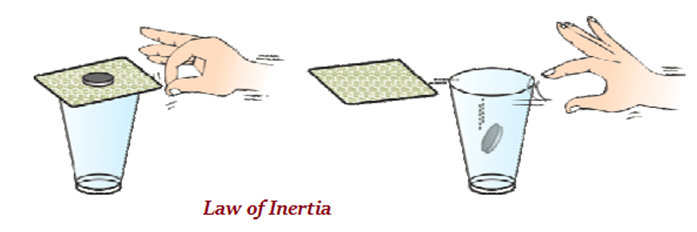
Explanation: Here force is applied only on the card and thus moves away but the coin will try to remain at rest due to its inertia and thus falls into the glass as soon as the card is pushed away.
3. When we hold the trunk of the tree and try to shake it, fruits fall from it.

Explanation: when we shake the trunk, the whole tree starts to shake The little branch with which the fruit is connected also vibrates and the fruit will try to remain at rest due to its inertia and thus detaches from it and falls on the ground.
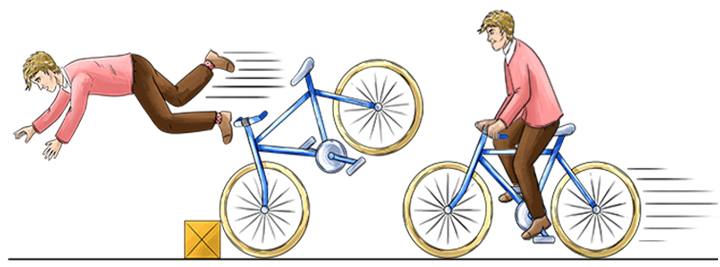
4. Newton's law of inertia is the law that tells us why we should wear seatbelts while driving.

5. Law of inertia tells us while you go flying over the handlebars if you stop the bicycle suddenly.
Momentum
The momentum of a body is defined as the product of the mass and velocity of that body. It is a vector quantity.
Let’s first discuss some common experiences related to motion in our daily life.
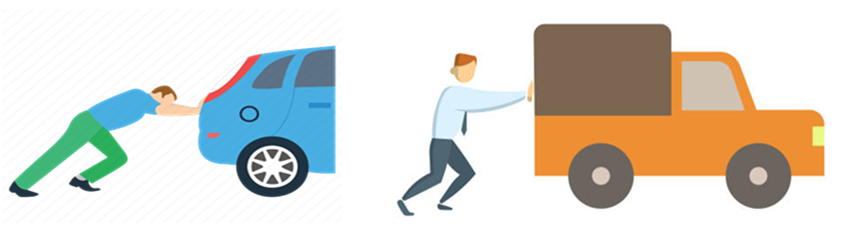
It is easier to put a car into motion than a loaded truck. Similarly, it would require greater force to stop a loaded truck moving at the same speed as a car at the same time.
Two stones, one lighter and the other heavier are dropped from the same height then it will be easier to catch the lighter stone than to catch the heavy stone.
From the above two discussions, we conclude that mass is one parameter that determines the effect of force on the motion.
A bullet fired from a gun can pierce human flesh before it stops and hence causes casualty. But the same bullet when thrown with hands does not harm much. This is because the stone fired from the gun has a much larger velocity than the bullet thrown by hands. Here we conclude that velocity is also a parameter that determines the effect of force on the motion.
As mass and velocity both are important parameters to describe the effect of force on the motion. Therefore a physical quantity which is the product of both mass and velocity (momentum) is a relevant variable of the motion
We can say that the greater the change in the momentum of a body, the greater the force will be needed. This statement laid the basis for the formulation of Newton's second law.
Newton’s second law of motion
Newton’s second law is a quantitative description of the changes that a force can produce in the motion of a body. It states that the time rate of change of the momentum of a body is equal in both magnitude and direction to the force imposed on it.
Statement: The rate of change of momentum of the body is directly proportional to the applied force and takes place in the direction in which force acts.
If a force F is applied on a body of mass ‘m’ for a time Δt, if the velocity of the body change from ‘v to v+Δv’
Change in momentum Δ p = m ( v +Δv ) - mv= mΔv
Rate of change of momentum = m Δv/ Δt
So according to newton’s second law
Here K= proportionality constant which is equal to 1 here.
So mathematically,
- S.I. unit of force is Newton .
- 1 N is the force that produces an acceleration of
- When F= 0 then acceleration is also zero. So we can say that Newton’s second law is consistent with Newton's first law.
- Now since F and acceleration is a vector quantity
So using Newton’s second law we have
- The second law of motion is applicable to a single particle. In the case of an extended object, we consider it equivalent to a point particle and all the forces are applied on a single point which is the center of mass.
- Any internal forces within the body itself are not included in the force.
- The second law of motion is a local equation. It means that Force F at a given point at an instant ‘t’ relates to the acceleration at that point in that instant.
The same force for the same time produces the same change in momentum for different bodies
Some examples of Newton’s Second law from daily life.
- Karate player breaking slabs of bricks

A karate player makes use of the second law of motion to perform the task of breaking a slab of bricks. Since, according to law, the force is proportional to the acceleration, the player tends to move his/her hands over the slab of bricks swiftly. This helps him/her to gain acceleration and produce a proportionate amount of force. The force is sufficient enough to break the bricks.
- It is easier to push an empty shopping cart than a full one because the full shopping cart has more mass than the empty one. This means that more force is required to push the shopping cart.

- Two people walking: of the two walking people, if one is heavier than the other, the one who weighs the heaviest walks slower because the acceleration of the one who weighs the lighter is more.
- Kick the ball: When we kick the ball we exert force in a specific direction, which is the direction the ball will move. In addition, the more forcefully the ball is kicked, the more force we apply to it and the further away the ball is.

- Racing cars: Reducing the weight of racing cars to increase their speed, engineers try to keep vehicle mass as low as possible, as a lower mass means more acceleration, and the higher the acceleration the greater the chances of winning the race.

- Objects falling under gravity: When an object falls in a free fall onto the ground, it accelerates because the force of gravity of the earth pulls it. The velocity of the object keeps on increasing as it falls and has its maximum value just before hitting the ground.
There are many examples that illustrate Newton's second law in our daily life.
Impulse
Sometimes a large force acts on a body for a very short instant of time and thus produces a finite momentum on the body. For example, when a ball hits the wall, it bounces back. The force on the ball acts for a very short duration yet the force is large enough to reverse the momentum of the ball. Another example could be when a ball hits the bat and bounces back.
Since the force is very large and the time duration is very small. It is difficult to take account of both so we talk about change in momentum in such cases. Change in momentum is called impulse
A large force acts for a very small time producing a finite change in momentum called Impulsive force. This is just like any other force in the mechanics.
Newton’s Third Law
Forces exist in two forms, either as a result of contact interactions, i.e., normal, tensional, frictional, and applied forces; or as a result of actions-at-a-distance interactions, existing in the form of electrical, electrical, and magnetic forces. In this law, Isaac Newton described any two objects that are interacting to be exerting mutual forces upon each other.
- If you punch the bench with your first with some force, your fist will also experience a force from the bench and it will get hurt.
- If you are reading this article while sitting on the chair, you are exerting a force on the chair and in return, the chair also exerts an equal force on you. These forces cancel each other in pairs and thus you are sitting comfortably on it.
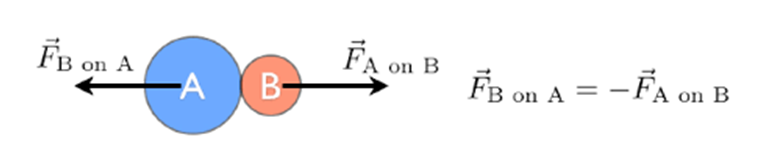
“Forces come in pairs.”. The two equal forces exerted are of the same magnitude but in opposite directions, known as action and reaction forces. This led to the foundation of Newton’s third law.
Statement of Newton’s third law. To every action, there is an equal and opposite reaction.
In fact, the term action-reaction is a misnomer. There is nothing like one force is the cause and the other force is the effect. There is no cause-effect relation implied to the third law. Object A applies a force F on B and object B also applies a force F on A in the opposite direction at the same instant.
How Is Newton’s Third Law of Motion Useful in Our Real Life?
A variety of action-reaction force pairs are evident in nature, and in our real life. Here are 7 applications of Newton’s third law of motion:
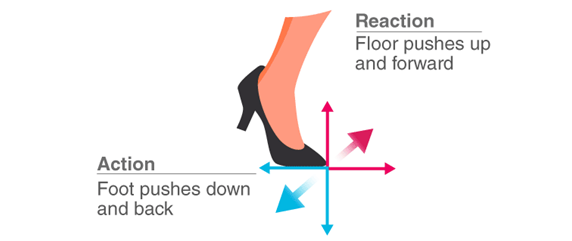
- Walking: When you walk, you push the street; i.e., you apply an active force on the street’s ground, and the reaction force moves you forward.
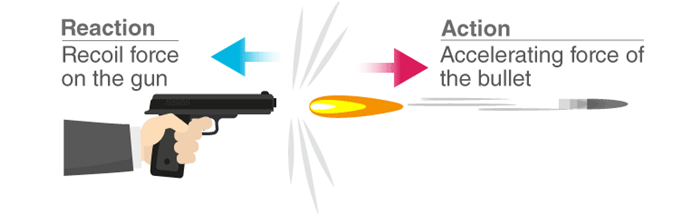
- Gun Firing: when someone fires a gun, the action force pulls the bullet outside the gun, and the reaction force pushes the gun backward.
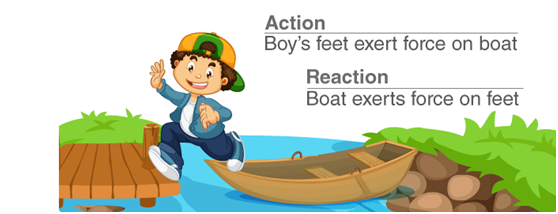
- Jumping from a boat: the action force is applied on the boat, and the reaction force pushes you to land. Parallelly, the action force pushes the boat backward.
- Slapping: when you slap someone, your hand feels pain and so does the cheek of the victim. The pain in the cheek is due to action force, and the pain in the palm is due to reaction force.
- Bouncing a ball: when a ball hits the ground, the ball applies an action force on the ground. The ground applies a reaction force and the ball bounces back.
- Flight motion of a bird: the wings of the bird push air downwards as an active force, and the air pushes the bird upwards as a reaction force.
- Swimming of a fish: the fish’s fins push water around it backward as an active force, and the water applies a reaction force by pushing the fins forward, thus the fish.
1. Work
Work
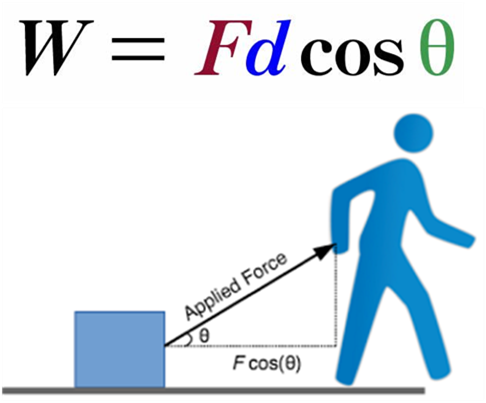
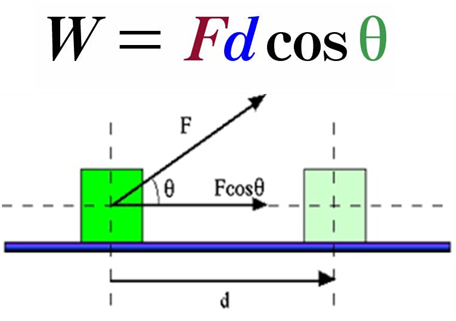
Work is the product of the component of the force in the direction of the displacement and the magnitude of this displacement.
work, in physics measure of energy transfer that occurs when an object is moved over a distance by an external force at least part of which is applied in the direction of the displacement. If the force is constant, work may be computed by multiplying the length of the path by the component of the force acting along the path.
To express this concept mathematically, the work W is equal to the product of force and the distance d,
Work done on a body is equal to the increase in the energy of the body, for work transfers energy to the body. If, however, the applied force is opposite to the motion of the object, the work is considered to be negative, implying that energy is taken from the object.
Positive, negative and zero work done
The work done by a force on an object can be positive, negative, or zero, depending upon the direction of displacement of the object with respect to the force. For an object moving in the opposite direction to the direction of force, such as friction acting on an object moving in the forward direction, the work done due to the force of friction is negative.
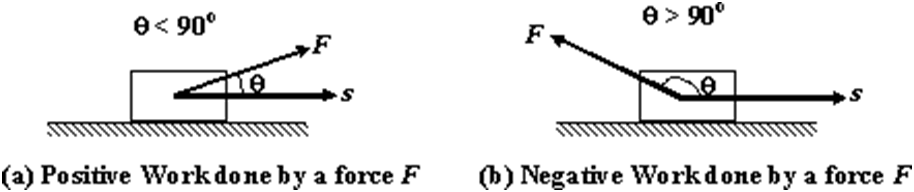
Positive work: when the force is along the displacement or angle θ between force and displacement is acute.
Example of positive work:
- Players kicking the football in the direction of motion.
- A nurse moves the patient into a wheelchair.
- A person riding a skateboard.
- Vehicles on the road, moving forward.
- Cutting the vegetables using the knife.
- Lifting the chair and moving it in another direction.
- Moving a box across the table.
- Two children throwing a ball at each other.
Negative work: when the force is opposite to the displacement or angle θ between force and displacement is obtuse.
Example of negative work
(i) When a body is thrown upwards, gravity does the negative work. Since the gravitational force acts downwards but the displacement is upwards.
(ii) When we walk frictional force does the negative work since frictional force acts opposite to displacement.
(iii) For a liquid flowing, viscous force does the negative work since it acts opposite to the direction of the force.
(iv) On a see-saw, negative work is done since we apply the force downwards but the person sitting opposite to us is displaced upwards.
Zero work done:
An object experiences zero work when
- The angle of displacement is perpendicular to the direction of the force
- when the force applied couldn’t produce motion.
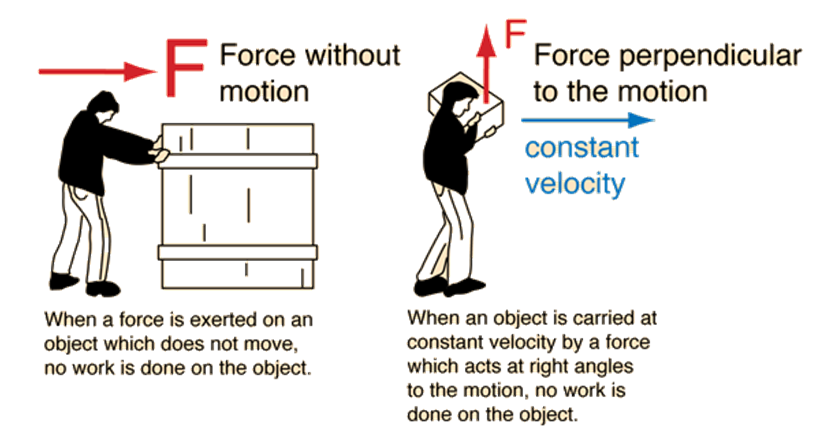
Consider an example of a coolie lifting a mass on his head moving at an angle of 90˚ with respect to the force of gravity. Here, the work done by gravity on the object is zero.
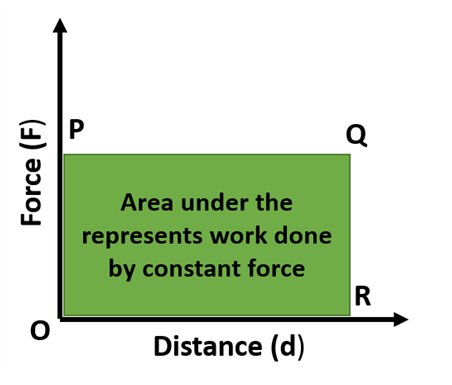
Work done by constant force
Work done by a constant force is defined as the distance moved
multiplied by the component of force in the direction of displacement.
The area under the graph of force and displacement gives the value of work done by the force.
Example of work done by a constant force
- Work done by gravity
- When we apply a constant force F on a book and it moves.
- Motion of ball falling toward the ground.
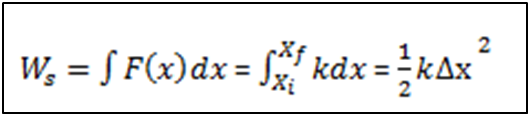
Work done by a variable force
Variable force occurs when the direction and amount of a force vary throughout the motion of a body. Magnetic force, spring force, and electrostatic force are examples of variable forces. The majority of the forces we experience in our daily lives are variable forces. By splitting displacement into tiny intervals, the work done by a variable force may be computed.
A force is said to perform work on a system if there is displacement in the system upon application of the force in the direction of the force. In the case of a variable force, integration is necessary to calculate the work done.
The work done by a constant force of magnitude F, as we know, that displaces an object by Δx can be given asL:
W = F.Δx
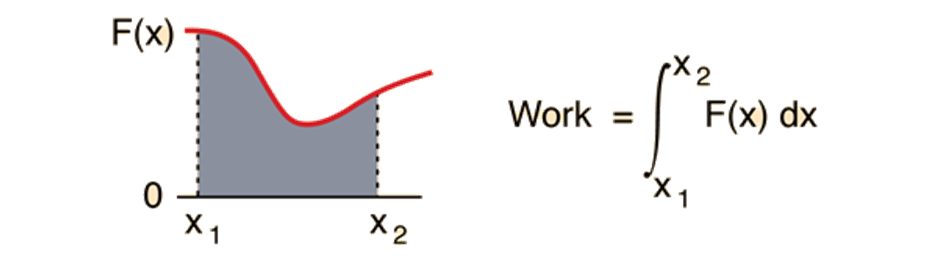
In the case of a variable force, work is calculated with the help of integration.
The work done by force can also be calculated from the graphical method. The area under the curve in the graph of force vs displacement will give the magnitude of work done by the force.
For example, in the case of a spring, the force acting upon any object attached to a horizontal spring can be given as:
Fs = -kx
Where,
- k is the spring constant
- x is the displacement of the object attached
We can see that this force is proportional to the displacement of the object from the equilibrium position, hence the force acting at each instant during the compression and extension of the spring will be different. Thus, the infinitesimally small contributions of work done during each instant are to be counted in order to calculate the total work done.
The integral is evaluated as:
1. Center of mass
Introduction
In the mechanics we have studied so far, we have assumed the object to be a point mass object, we actually neglected the finite size of the objects. For example, when we talked about the motion of a car on a road, we actually neglected the finite size of the car and actually treated it like a point mass which is certainly not true.
Almost everything which we encounter in our daily life is of finite size and in dealing with the motion of an extended body (of finite size) the idealized concept ( taking it as a point size ) is inadequate.
We must try to understand the motion of the extended body as a system of particles. We shall begin with the consideration of the motion of the system as a whole. The center of mass of a system of particles will be a key concept here.
A wide variety of problems on extended bodies can be solved by taking it as a rigid body. Ideally, a rigid body is a body with a perfectly definite and unchanging shape. The distances between all pairs of particles of such a body do not change.
Although this assumption is not always true, in many cases the deformation produced after the application of the force on a rigid body is so small that it can be neglected.
What are the kinds of Motions a rigid body can have?
We can have three types of motion in a rigid body.
- Purely translational motion.
- Translational + rotational motion.
- Purely rotational motion.
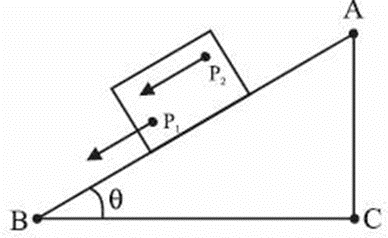
Purely translational motion
In pure translational motion at any instant of time, all particles of the body have the same velocity.
Consider a rectangular block sliding on an inclined plane. We suppose that this block is made up of a system of particles. Suppose we pinpoint two particles P1 and P2 here. We will see that in the case of translational motion, both the particles move with the same speed in the same direction which means they have identical velocities.
Pure rotational motion
Pure Rotational motion is the type of motion about a fixed axis. All the particles constituting it undergoes circular motion about a common axis, then that type of motion is rotational motion.
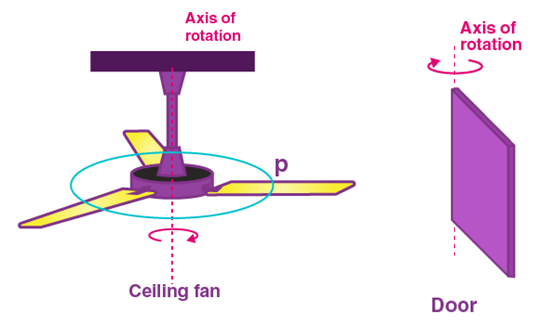
The line or fixed axis about which the body is rotating is its axis of rotation A rotating body is said to be in the pure rotation if all the points at the same radius from the Center of rotation will have the same velocity.
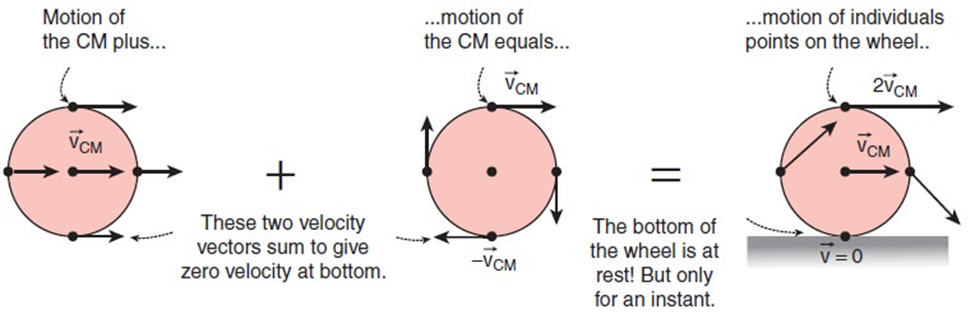
Rotational plus translational motion- Rolling motion
The rolling motion is a combination of translational motion and rotational motion. For a body, the motion of the center of mass is the translational motion of the body. During the rolling motion of a body, the surfaces in contact get deformed a little temporarily.
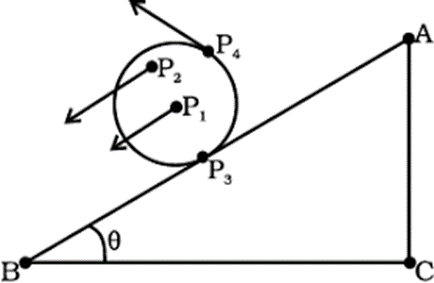
During rolling motion, all the particles have different velocities. Like P1, P2, P3, and P4 in the above example of a ball rolling down the inclined plane has different velocities.
Rolling of the wheel is an example of rolling motion. In pure rolling motion (rolling without slipping), the point of contact is at rest.
Out of these three types of motion of the rigid body, we will discuss the rotational motion of the rigid body in detail in this chapter.
Rotational motion of the rigid body
The rotational motion of a rigid body can be of two types.
- Rotation about a fixed axis of rotation :
In rotation of a rigid body about a fixed axis, every particle of the body moves in a circle, which lies in a plane perpendicular to the axis and has its center on the axis. For example, rotating fan, merry-go-round, potter's wheel, etc.
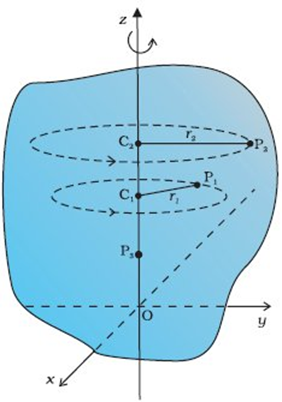
In the figure given above on the right, there is a rigid body that is rotating anticlockwise about the Z axis as shown. The solid line shows the axis of rotations.
We take two particles P1, and P2 at distances r1 and r2 respectively from the axis of rotations. Circles C1 and C2 give the path of the particle followed while rotating. These circles C1 and C2 lie in a plane perpendicular to the axis of rotation.
Another particle P3 is taken at the axis of rotation so here r=0, this point will remain at rest when the whole of the rigid body would be rotating. For any particle on the axis like P3, r = 0. Any such particle remains stationary while the body rotates. This is expected since the axis of rotation is fixed.
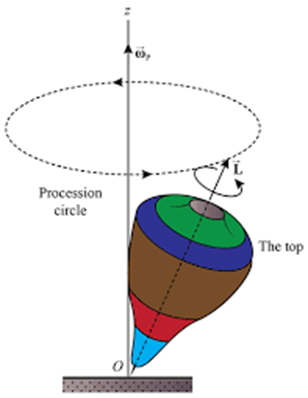
- Precessional motion: Rotation about an axis in the rotation (rotating axis )
In some examples of rotation, however, the axis may not be fixed. A prominent example of this kind of rotation is a top spinning in place. We know from experience that the axis of such a spinning top moves around the vertical through its point of contact with the ground, sweeping out a cone as shown in the figure.
The motion of a rigid body which is not pivoted or fixed in some way is either a pure translation or a combination of translation and rotation. The motion of a rigid body which is pivoted or fixed in some way is rotation
Center of mass
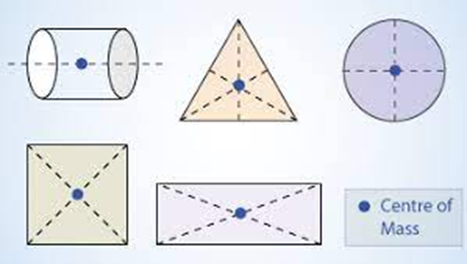
The center of mass is a position defined relative to an object or system of objects. It is the average position of all the parts of the system, weighted according to their masses.
For simple rigid objects with uniform density, the center of mass is located at the centroid. For example, the center of mass of a uniform disc shape would be at its center. Sometimes the center of mass doesn't fall anywhere on the object. The center of mass of a ring for example is located at its center, where there isn't any material.
For more complicated shapes, we need a more general mathematical definition of the center of mass.
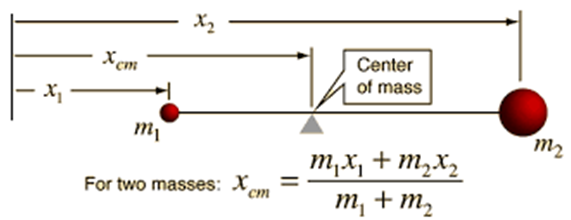
We shall first see what the center of mass of a system of particles is and then discuss its significance. For simplicity, we shall start with a two-particle system. Suppose we have two objects of mass m1 and m2, which are located on the x-axis at distances x1 and x2 from the origin. The Center of mass must be somewhere in between the two masses and let's suppose it is at a distance xcm from the origin.
So position of center of mass xcm =
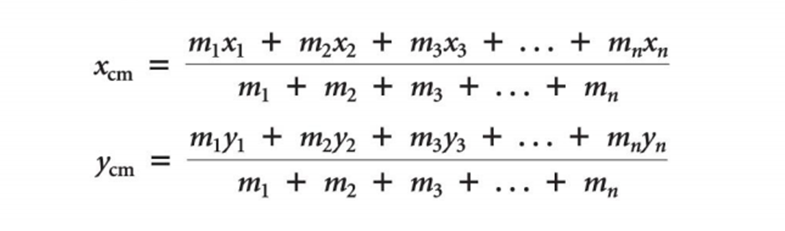
For masses in two-dimensional plane x-y. Suppose we have ‘n’ masses with mass m1, m2, m3 … up to n which are at coordinates (x1, y1), (x2,y2), (x3, y3)... And so on.
Then x and y coordinates of the position of the center of mass Xcm and Ycm is given by,
And similarly, we can extend this concept to 3-dimensional discrete distribution of masses to calculate the position of the center of mass (Xcm, Ycm, Zcm) using the masses of discrete mass and their coordinates.
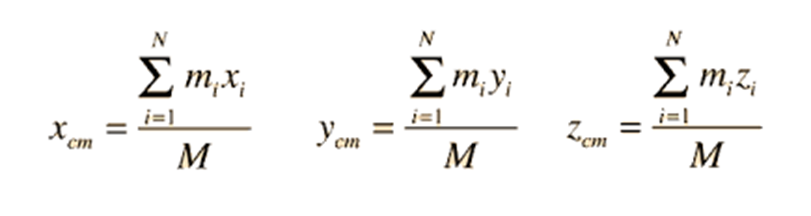
Above three equations can be combined into one equation using the notation of position vectors. Let ri be the position vector of i th particle and R be the position vector of the center of mass:
But most of the objects we have are objects with continuous mass distribution, so we have to do integration in place of summation to get the center of mass of the objects with continuous mass distribution.
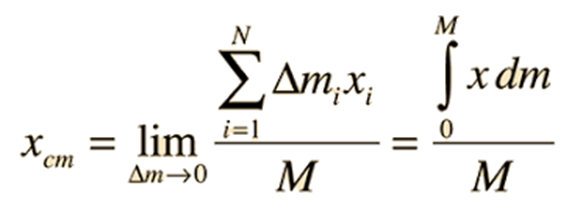
We can do the same for the calculation of Ycm and Z cm.
Examples of calculation of Center of mass
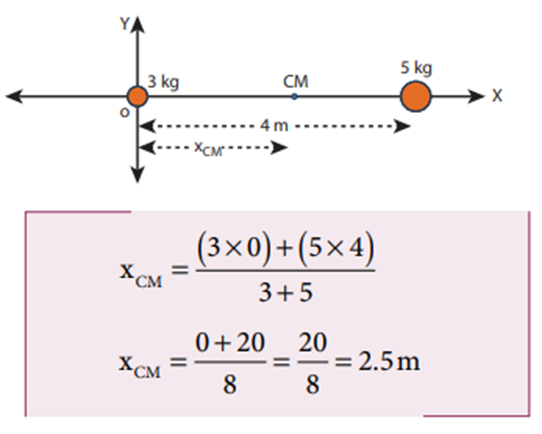
Example 1: Two masses of 3 kg and 5 kg kept at origin and x= 4 cm respectively along the x-axis. Then find the position of the center of mass.
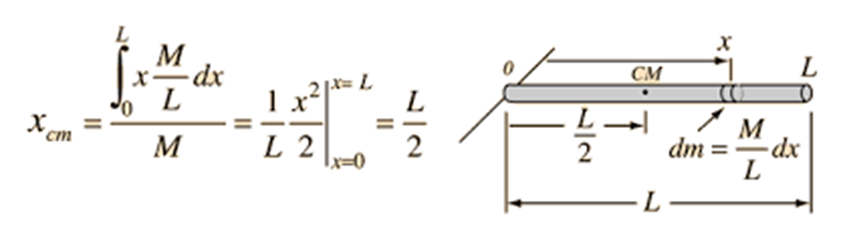
Example: Calculation of center of mass of a uniform rod.
Consider a uniform rod of length L and total mass M. Then the Center of mass of this will be at the middle of the rod Xcm=L/2
The motion of the center of mass
In this section, we will learn about the physical significance of the concept of the center of mass. We consider an object of total mass M to be made of up h ‘n’ particles of masses m1, m2, and m3….. At positions r1, r2, r3,... and so on. If R is the position of the center of mass.
Then
If we differentiate with respect to time both sides
We have then
We know that
where V is the velocity of the center of mass.
Differentiate eq 2 with respect to time again and use
where A is the acceleration of the center of mass.
Now using Newton’s second law F= ma,
we can write
Thus, the total mass of a system of particles times the acceleration of its center of mass is the vector sum of all the forces acting on the system of particles.
Note in equation 4 when we talk of the force F1 on the first particle, it is not a single force, but the vector sum of all the forces on the first particle and so on for other particles.
The center of mass of a system of particles moves as if all the mass of the system was concentrated at the center of mass and all the external forces were applied at that point.
Instead of treating extended bodies as single particles as we have done in earlier chapters, we can now treat them as systems of particles. We can obtain the translational component of their motion, i.e. the motion of the center of mass of the system, by taking the mass of the whole system to be concentrated at the center of mass and all the external forces on the system to be acting at the center of mass.
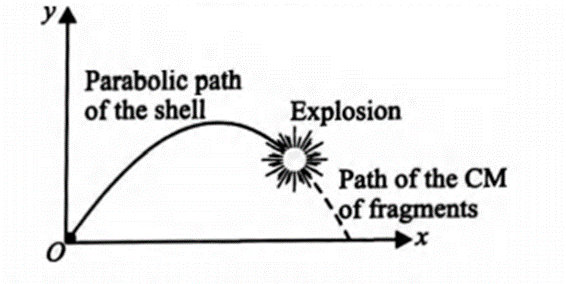
The motion of an explosive after the explosion.
Suppose a bomb is thrown and it is following a parabolic path (projectile motion) due to external force gravity on it. Suppose it explodes mid-air and breaks into fragments. These fragments then move in different directions in such a way that their center of mass will remain following the previous parabolic path the projectile would have followed with no explosion.
Linear momentum for a system of particle
We know that the linear momentum of the particle is
Where F is the force of the particle.
For ‘n’ no of particle total linear momentum is
Now comparing these equations we get
The above equation is nothing but Newton's second law to a system of particles. If the total external force acting on the system is zero.
So whenever the total force acting on the system of particles is equal to zero the total linear momentum P of the system is constant or conserved. This is nothing but the law of conservation of linear momentum of a system of particles.
A fun thing to do
Below is the link of the simulation of the balancing act
Tips:
- Consider the middle of the balance as the origin and left scales as negative and the right scales as positive.
- Using the formula of the center of mass in 1 Dimension, try to balance it by trying to keep the center of mass at origin.
What can you do with the simulation?
- You can put various masses on the balance and try to balance both sides by either changing masses or by changing its positions on the balance.
- Once you put your masses, change the toggle button to remove the supports and see what happens to your balance.
1. universal gravitation
Introduction
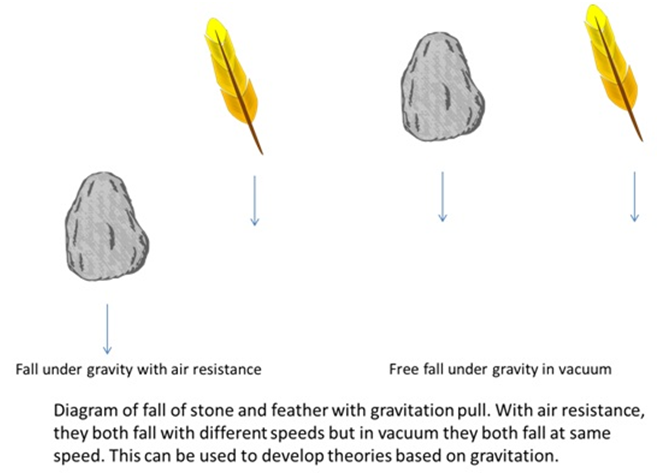
In our daily life, we all have noticed that everything that is thrown up will fall back to earth. Going uphill is a lot more tiring than going downhills and raindrops from clouds move towards the earth. There are a lot more such phenomena. An Italian scientist Galileo recognized every object experiences a constant acceleration toward the earth, irrespective of their masses.
The stars, moon and planets have been observed since ancient times. The motion of the moon around the earth and the motion of the earth around the sun were some phenomena that needed to be explained.
In early times it was believed that the earth is the center of the universe and everything revolves around the earth. This was known as the geocentric theory. This prevails for a very long time and at that time there was not much advancement in this subject. Later Galileo and other astronomers found that the Sun is the center and not the earth, and all the planets including the earth move around the Sun. This theory was known as the heliocentric theory. After the establishment of the heliocentric theory, the rapid advancement of various subjects of Science happens. Therefore Galileo is known as the Father of Modern Science.
In this chapter, we will discuss the laws that will explain all the phenomena discussed above.
Kepler’s Law
A nobleman Tycho Brahe from Denmark spent his entire life recording observations for the planets with naked eyes. His compiled data was analyzed later by his assistant Johannes Kepler. He could extract from the data three law’s called Kepler’s Laws.
Three Laws of Kepler
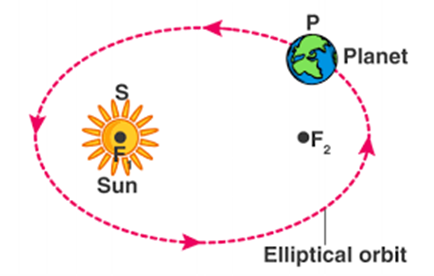
- Law of the orbit: All Planets move around the sun in an elliptical orbit with the sun at one of its foci.
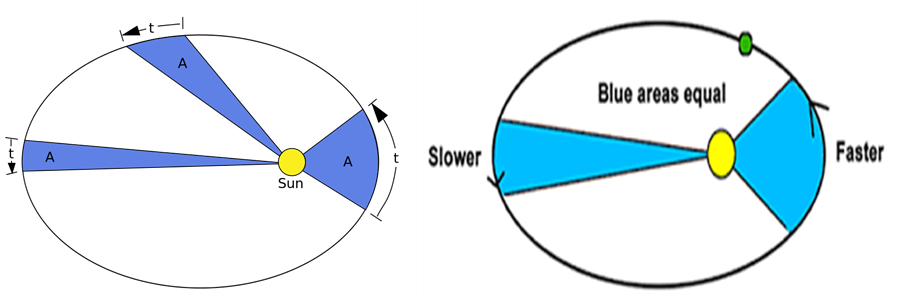
- Law of Area: The line that joins any planet to the sun sweeps equal areas in equal intervals of time. This law comes from the observations that planets appear to move slower when they are farther from the sun than when they are nearer.
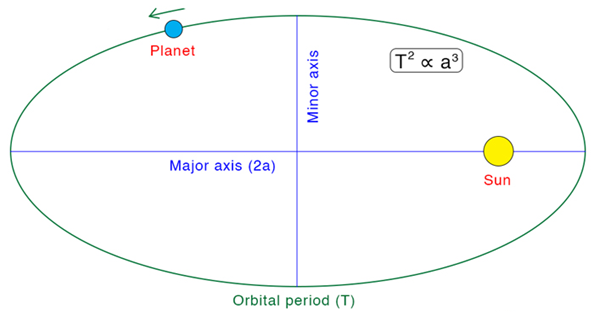
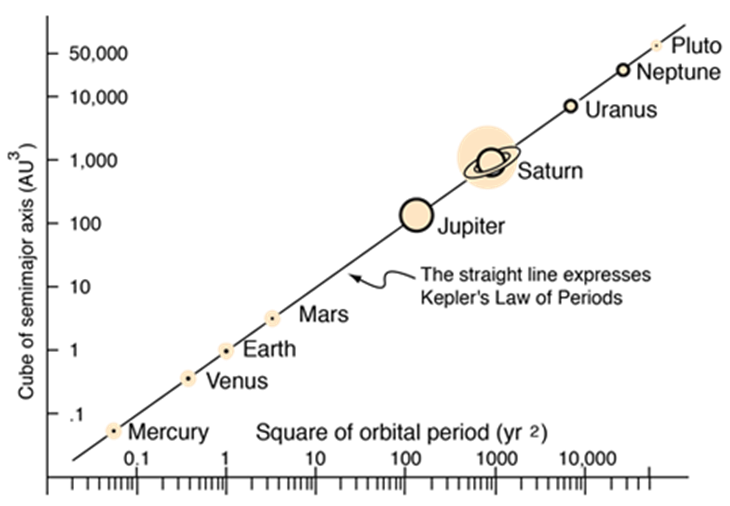
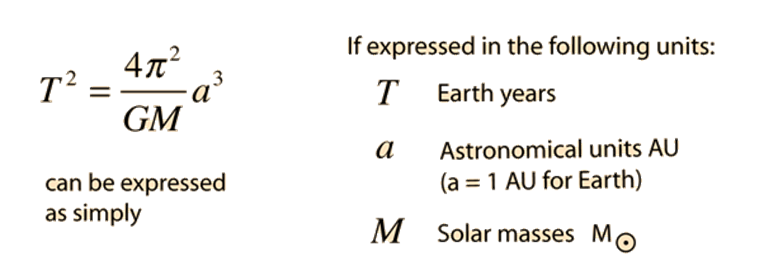
- Law of period: The Square of the time period of revolution of a planet is proportional to the cube of the semi-major axis of the ellipse traced out by the planet. Mathematically,
The graph between the Time period and their semi-major axis is drawn below
This law is also consistent with the conservation of angular momentum.
Since the angular momentum of the planet revolving around the sun at any point of time is conserved.
The universal law of Gravitation
Kepler’s laws were known to Newton and enabled him to make a great scientific leap in proposing his universal law of gravitation.
Statement of Universal law of gravitation:
Every object in the Universe attracts every other object with a force directed along the line of the center for the two objects that is proportional to the product of their masses and inversely proportional to the square of the separation between the two objects.
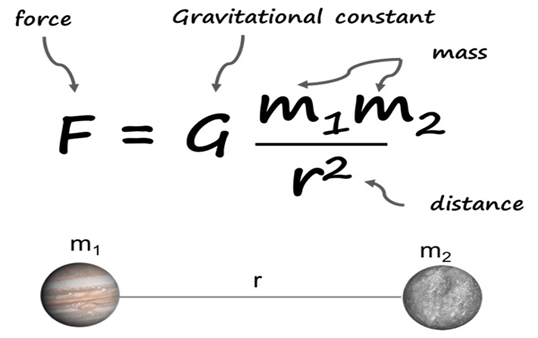
Where G= universal gravitational constant
The Universal Gravitational Law can explain almost anything, right from how an apple falls from a tree to why the moon revolves around the earth.
- The gravitational force is always attractive. Also the magnitude of gravitational force on mass 1 due to mass 2 is equal to the magnitude of the force on mass 2 due to mass 1.
- This law refers to point masses whereas we deal with extended objects which have finite size, so we use the concept of center of mass here. For example, The force of attraction between a hollow spherical shell of uniform density and a point mass of the shell is just as if the entire mass is concentrated at the center of the shell.
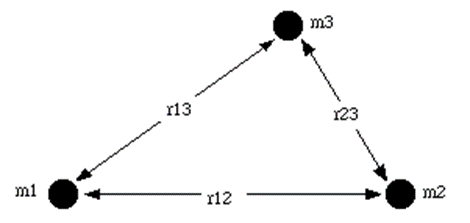
- If we have a collection of point masses the force on any one of them is the vector sum of the gravitational force exerted by the other point masses. This is actually the principle of superposition.
![]()
- The force of attraction due to a hollow spherical shell of uniform density, on a point mass situated inside it is zero. Qualitatively, we can again understand this result. Various regions of the spherical shell attract the point mass inside it in various directions. These forces cancel each other completely.
Acceleration Due to Gravity
When you throw something in the air, you notice that it goes up and then it comes down toward the earth and finally lands on the ground. The same thing will happen if you drop an object from some height. It will also land up on the ground. This happens because of the gravitational pull of the earth.
Now let's take two objects of mass m1 and m2 (where m1>m2). When we drop these masses from some height you will notice that both the masses hit the ground at the same time irrespective of their masses. So we can conclude from here that the gravitational pull of the earth on various objects near it is independent of the masses of the objects.
The conclusion from the above discussion is that earth pulls every object towards it with a force that is independent of the mass of the object. This pull is due to the gravitational force between the earth and the object.
Let the acceleration due to gravity on the object be ‘g’ , so gravitational force due to earth on an object of mass ‘m’ would be ‘mg’ which is actually equal to the weight of the object.
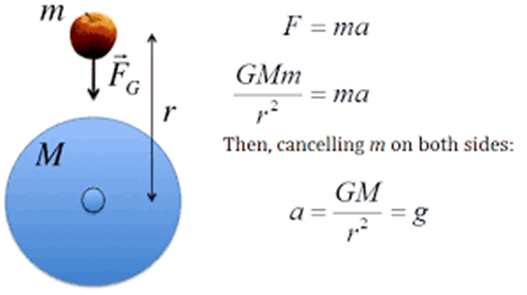
Let the mass of the earth is me and the radius of the earth is R, gravitational force between the earth and the object near the earth would be
![]()
From the above-derived formula of acceleration due to gravity ‘g’ is it clear that it is independent of the mass of the object and only depends on the mass of the earth and the distance of the object and the center of the earth.
When the objects are near the earth when (h<<R), then we take the radius of earth ‘R’ as the distance between the earth and the object.
![]()
But when we move to a greater height from the earth or at a certain depth inside the earth then the value of g would be different. In the next section, we would see the variation of ‘g’ with height and depth.
Variation of g with height and depth
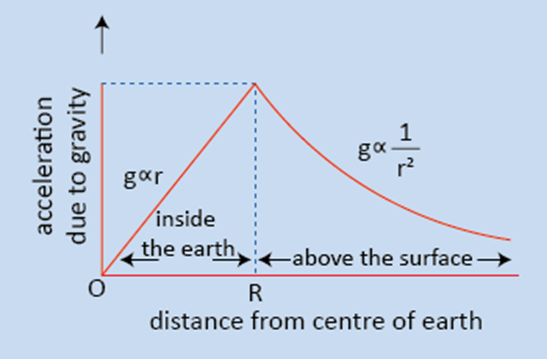
The value of g varies with altitude and depth from the surface of the earth. We will discuss the derivation of the variation of g with depth and height. After that, we will see from the results that the value of g is maximum at the surface of the earth and decreases with both altitude and depth.
Variation of acceleration due to gravity with depth.
Suppose we have to calculate ‘g’ at the depth‘d’ from the surface of the earth. Suppose M be the mass of the whole earth and M1 be the mass of the inner sphere of the earth below the depth d as shown in the figure.
While calculating the value of g at the depth‘d’ we have to consider the gravitational force due to inner mass M1 and not the mass of the whole earth.
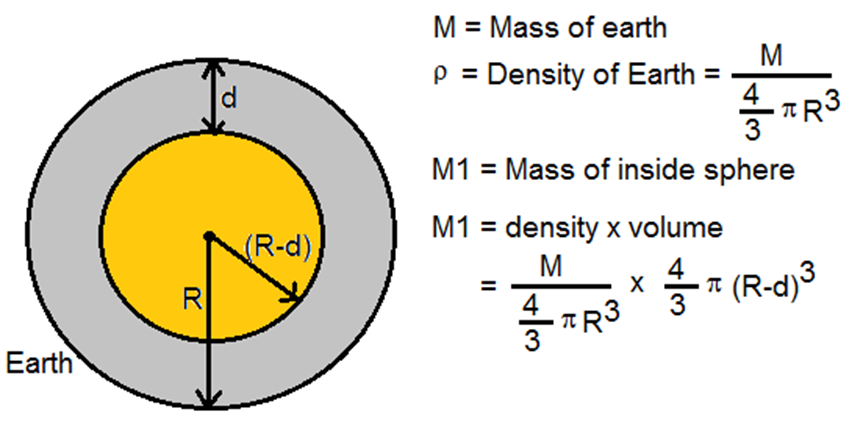
The acceleration due to gravity at depth d is gd, the mass of the inner sphere is M1 and the distance of it from the center of the earth is (Re-d) so we can write the value of acceleration due to gravity at depth d as
![]() ….1
….1
Now simplify the value of M1.
![]()
Now put the value of M1 in equation 1.
![]()
So we have finally the result.
The acceleration due to gravity varies with depth as ![]() )
)
Variation of acceleration due to gravity with height ‘h’
When we want to calculate the value of acceleration due to gravity at an altitude ‘h’ where
Acceleration due to gravity at height h go is given as
![]()
So now we have results,
Acceleration due to gravity varies with height as ![]()
The graph given below concludes the above discussion. It is clear that the value of g is maximum at the surface of the earth and decreases with both altitude and depth.
A fun thing to do: Virtual lab
Below is the link to understand the universal law of gravitation.
What can we do in this virtual lab simulation?
- We can change the masses of the objects
- We can change the distance between them
What can we observe?
- We can see the direction of the gravitational force on each body
- We can also see the magnitude of the gravitational force both in decimal and scientific notations.
2. measurements
Measurement :
In everyday experience, it is necessary to make measurements. Anytime one interacts with the environment around, he/she is making measurements of physical quantities. For this reason, it is important that measurements are available as friendly as possible for specialized and non-specialized people. Measurement is available if the measurement system is accessible and easy to use
Any mechanical quantity can be expressed in terms of three fundamental quantities, mass, length and time.
For example, speed is a length divided by time. Force is mass times acceleration and is, therefore, a mass times a distance divided by the square of a time.
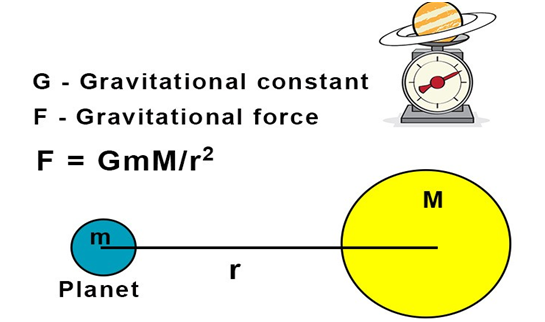
Measurement of Mass
The mass of an object is defined by Newton’s Laws. It is the resistance offered by an object to acceleration. In the SI system, we use kilograms to measure mass. But large quantities of matter like the mass of a mountain or the Earth or stars or the entire Universe is measured indirectly by using Newton’s Law of gravitation or other such equations
What are 3 ways to measure mass?

Mass is the amount of matter in an object. A number of tools exist for measuring mass in different environments. These include balances and scales, measurement transducers, vibrating tube sensors, Newtonian mass measurement devices and the use of gravitational interaction between objects.
Measurement of Time
All our activities depend on time. For example, to know the duration of a journey, to meet a schedule at work, to know whether it's day or night, to know the heartbeat, to know the amount of time taken by the computer to perform an operation, etc. Hence it is very important to measure time.
Two natural periodic events which were used in ancient times to measure time were the occurrence of the full moon and sunrise
- The time from one full moon to the next full moon was a month.
- The time from one sunrise to the next sunrise was called a day.
To measure time is to measure the length of time. We know the following units of measuring time: second, minute, hour, day, week, fortnight, month, year, and century. There are various methods of measuring time in different parts of the world.
These instruments can be anything that exhibits two basic components:
(1) a regular, constant, or repetitive action to mark off equal increments of time.
(2) a means of keeping track of the increments of time and of displaying the result
Standard time
As a standard, the atomic standard of time is now used, which is measured by Cesium or Atomic clock. In a Cesium clock, a second is equal to 9,192,631,770 vibrations of radiation from the transition between two hyperfine levels of cesium-133 atoms.
Measurement of Length
Length is the term used for identifying the size of an object or distance from one point Length is a measure of how long an object is or the distance between two points. It is used for identifying the size of an object or distance from one point to another.
What is used to measure length?
Measuring length means measurement of the length of any object with the help of measuring tools like a ruler, measuring tape, etc.
Measurement of length is defined as the act of measuring the length of objects in some specified units which can be standard or non-standard.

Tools that can be used to measure length include rulers, vernier calipers, micrometer screw gauges, measuring tape and odometers. The most precise tool used to measure length are vernier calipers.
Parallax method: for measuring large distances.
To measure large distances between objects methods such as the echo method, the laser method, sonar method, radar method, triangulation method and Parallax method are used.
Parallax is the effect whereby the position or direction of an object appears to differ when viewed from different positions. When I say parallax it means that we are viewing the same object but from two different positions.
Example: Let us suppose you have some object. Let's say you have a candle that is quite far from you. You first close your right eye and view the candle with your left eye. Then you open your right eye and view the candle by closing your left eye and trying to view the same candle which is located at the same position.
You will find that there is a change in position. This is because you observed the same object from two different positions. So, the distance between these two different observation points is known as the basis and this phenomenon is known as parallax.
Measuring the distance of distant stars or planets with the parallax method.
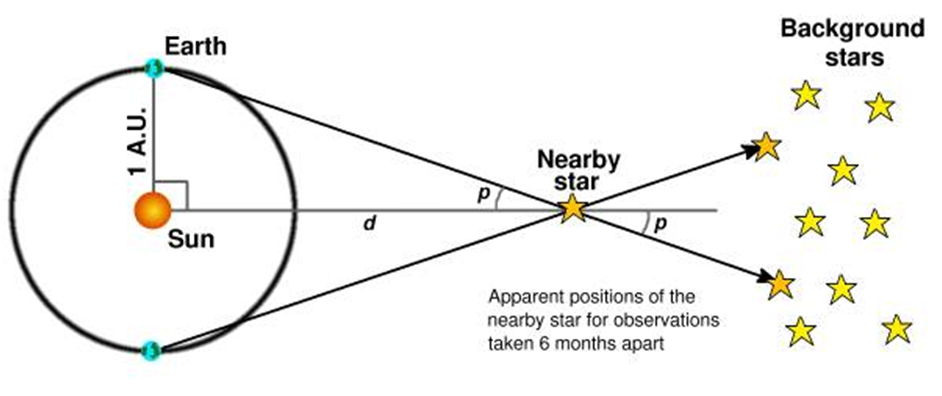
Distance of Planet From Earth
We will see another example here now. Let us suppose we have to find the distance of a distant planet from Earth. We observe the planet from Earth from two different observation points. Let us say we take an observation point as A (taken during June), and the other observation point as B(taken during December). We observe the planet from these two points.
Since the object is very far off, this object can be treated as a small point and the distance between points A and B are the basis. The basis, in this case, is nothing but the diameter of the earth. If we know the angle, that is the angle subtended at this planet from both the observation points then we can find out the value of D.
Accuracy and Precision of measuring instruments.
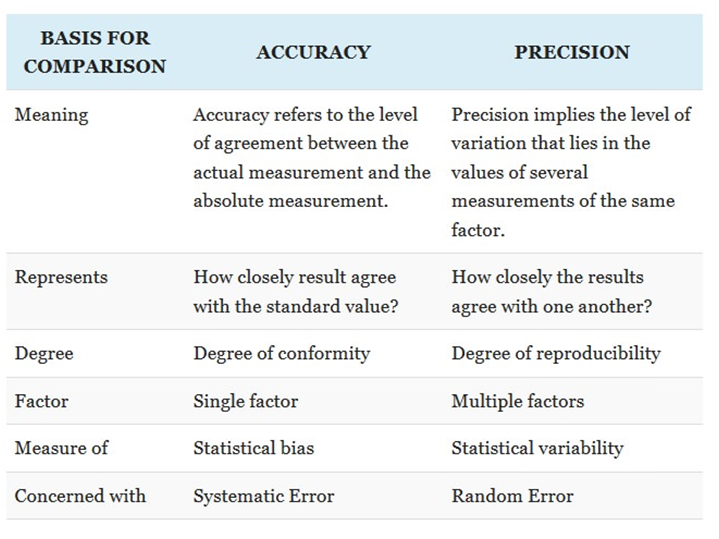
Accuracy is the degree of closeness to the true value. Precision is the degree to which an instrument or process will repeat the same value. In other words, accuracy is the degree of veracity while precision is the degree of reproducibility.
Precision is defined as the closeness between two or more measured values to each other. Suppose you weigh the same box five times and get close results like 3.1, 3.2, 3.22, 3.4, and 3.0 then your measurements are precise. Remember: Accuracy and Precision are two independent terms.
Accuracy refers to how closely the measured value of a quantity corresponds to its “true” value. Precision expresses the degree of reproducibility or agreement between repeated measurements. The more measurements you make and the better the precision, the smaller the error will be.
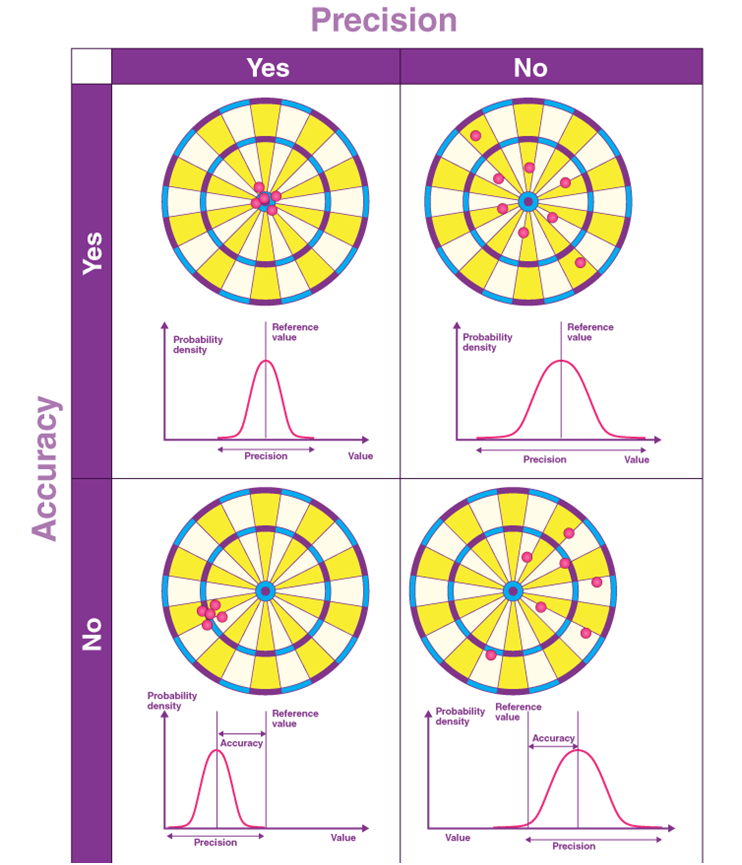
The top left image shows the target hit at high precision and accuracy. The top right image shows the target hit at a high accuracy but low precision. The bottom left image shows the target hit at a high precision but low accuracy. The bottom right image shows the target hit at low accuracy and low precision.
More Examples
- If the weather temperature reads 28 °C outside and it is 28 °C outside, then the measurement is said to be accurate. If the thermometer continuously registers the same temperature for several days, the measurement is also precise.
- If you take the measurement of the mass of a body of 20 kg and you get 17.4,17,17.3 and 17.1, your weighing scale is precise but not very accurate. If your scale gives you values of 19.8, 20.5, 21.0, and 19.6, it is more accurate than the first balance but not very precise.
Some frequently asked questions related to Accuracy and precisions
- Why are accuracy and precision important in measurement?
In order to get the most reliable results in a scientific inquiry, it is important to minimize bias and error, as well as to be precise and accurate in the collection of data. Both accuracy and precision have to do with how close a measurement is to its actual or true value.
- How do you measure instrument accuracy?
The accuracy formula provides accuracy as a difference of error rate from 100%. To find accuracy we first need to calculate the error rate. And the error rate is the percentage value of the difference between the observed and the actual value, divided by the actual value
- What is better accuracy or precision?
Precision is how close measure values are to each other, basically how many decimal places are at the end of a given measurement. Precision does matter. Accuracy is how close a measured value is to the true value. Accuracy matters too, but it's best when measurements are both precise and accurate.
- Which of the following is the most accurate instrument for measuring length?
Screw gauge of least counts 0. 001 cm is the most precise instrument for measuring length as a device with a minimum least count is more suitable for measuring length.
- What is the importance of accuracy?
Accuracy is to ensure that the information is correct and without any mistakes. Information accuracy is important because the lives of people depend on it like the medical information at the hospitals, so the information must be accurate.
- What is the importance of precision?
Precision in scientific investigations is important in order to ensure we are getting the correct results. Since we typically use models or samples to represent something much bigger, small errors may be magnified into large errors during the experiment.
- How can you improve accuracy?
The accuracy can be improved through the experimental method if every single measurement is made more accurate, e.g. through the choice of equipment. Implementing a method that reduces systematic errors will improve accuracy.
- How do accuracy and precision relate to significant figures?
Accuracy refers to how closely a measured value agrees with the correct value. Precision refers to how closely individual measurements agree with each other. In any measurement, the number of significant figures is critical.
- What are the three ways to ensure that you are making an accurate and precise measurement?
What three steps can you take to ensure that your measurements are both accurate and precise? First, use a high-quality measurement tool. Next, measure carefully. Finally, repeat the measurement a few times.
Error in measurements
Sometimes we fail to know the exact measurement and the values vary giving rise to errors. In this article, let us learn about measurement, errors in measurement, types of errors and how to avoid the errors.
An error may be defined as the difference between the measured value and the actual value. For example, if the two operators use the same device or instrument for measurement. It is not necessary that both operators get similar results. The difference that occurs between both the measurements is referred to as an ERROR.
There are three types of errors that are classified on the basis of the source they arise from; They are:
- Gross Errors
- Random Errors
- Systematic Errors
Gross Error
This category basically takes into account human oversight and other mistakes while reading, recording, and readings. For example, the person taking the reading from the meter of the instrument he may read 23 as 28.
Random Error
Random errors are those errors, which occur irregularly and hence are random. These can arise due to random and unpredictable fluctuations in experimental conditions (Example: unpredictable fluctuations in temperature, voltage supply, mechanical vibrations of experimental set-ups, etc
Systematic Error
Systematic errors can be better understood if we divide them into subgroups; They are:
- Environmental Errors
This type of error arises in the measurement due to the effect of external conditions on the measurement. The external condition includes temperature, pressure, and humidity
- Observational Errors
These are the errors that arise due to an individual’s bias, lack of proper setting of the apparatus, or an individual’s carelessness in taking observations. The measurement errors also include wrong readings due to Parallax errors.
- Instrumental Errors
Instrumental Errors: These errors arise due to faulty construction and calibration of the measuring instruments. Such errors arise due to the hysteresis of the equipment or due to friction.
Errors in Calculation
Different measures of errors include:
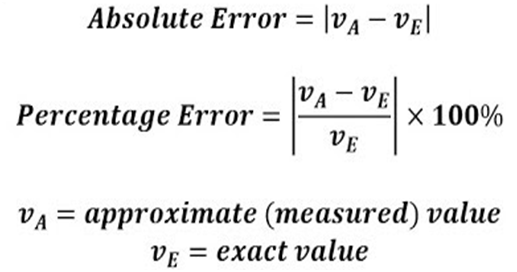
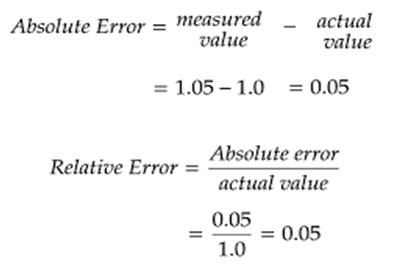
Absolute Error
The difference between the measured value of a quantity and its actual value gives the absolute error. It is the variation between the actual values and measured values. It is given by
Absolute error = |VA-VE|
Percent Error
It is another way of expressing the error in measurement. This calculation allows us to gauge how accurate a measured value is with respect to the true value. Percent error is given by the formula
Percentage error (%) = (VA-VE) / VE) x 100
Relative Error
The ratio of the absolute error to the accepted measurement gives the relative error. The relative error is given by the formula:
Relative Error = Absolute error / Actual value
Combination of Error
a) Error of a sum or a difference
When two quantities are added or subtracted, the absolute error in the final result is the sum of the absolute errors in the individual quantities.
Z = A + B
We have by addition, Z ± ΔZ = (A ± ΔA) + (B ± ΔB).
The maximum possible error in Z
ΔZ = ΔA + ΔB
For the difference Z = A – B, we have
Z ± Δ Z = (A ± ΔA) – (B ± ΔB) = (A – B) ± ΔA ± ΔB
or, ± ΔZ = ± ΔA ± ΔB
The maximum value of the error ΔZ is again ΔA + ΔB.
(b) Error of a product or a quotient
When two quantities are multiplied or divided, the relative error in the result is the sum of the relative errors in the multipliers.
Suppose Z = AB and the measured values of A and B are A ± ΔA and B ± ΔB. Then
Z ± ΔZ = (A ± ΔA) (B ± ΔB) = AB ± B ΔA ± A ΔB ± ΔA ΔB.
Dividing LHS by Z and RHS by AB we have,
1 ± (ΔZ/Z) = 1 ± (ΔA/A) ± (ΔB/B) ± (ΔA/A)(ΔB/B).
Since ΔA and ΔB are small, we shall ignore their product.
Hence the maximum relative error
ΔZ/ Z = (ΔA/A) + (ΔB/B).
(c) Error in case of a measured quantity raised to a power
The relative error in a physical quantity raised to the power k is the k times the relative error in the individual quantity.
Suppose Z = A2,
Then,
ΔZ/Z = (ΔA/A) + (ΔA/A) = 2 (ΔA/A).
Hence, the relative error in A2 is two times the error in A.
In general, if Z = (Ap Bq)/Cr
Then,
ΔZ/Z = p (ΔA/A) + q (ΔB/B) + r (ΔC/C).
How To Reduce Errors In Measurement
Keeping an eye on the procedure and following the below-listed points can help to reduce the error.
- Make sure the formulas used for measurement are correct.
- Cross-check the measured value of a quantity for improved accuracy.
- Use the instrument that has the highest precision.
- It is suggested to pilot test measuring instruments for better accuracy.
- Use multiple measures for the same construct.
- Note the measurements under controlled conditions.
Significant figures
Significant figures in the measured value of a physical quantity tell the number of digits in which we have confidence. Larger the number of significant figures obtained in a measurement, the greater the accuracy of the measurement. The reverse is also true.
Important Rules for counting significant figures
• All the non-zero digits are significant.
• All the zeros between two non-zero digits are significant, no matter where the decimal point is, if at all.
• If the number is less than 1, the zero(s) on the right of the decimal point but to the left of the first non-zero digit are not significant.
[In 0.00 2308, the underlined zeroes are not significant].
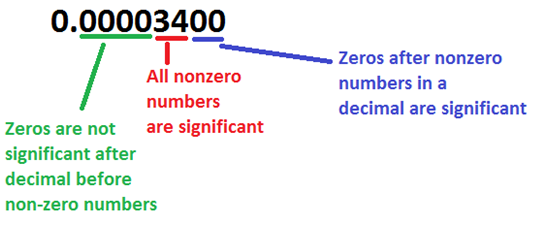
• The terminal or trailing zero(s) in a number without a decimal point are not significant.
[Thus 123 m = 12300 cm = 123000 mm has three significant figures, the trailing zero(s) being not significant.] However, you can also see the next observation.
• The trailing zero(s) in a number with a decimal point are significant.
[The numbers 3.500 or 0.06900 have four significant figures each.]
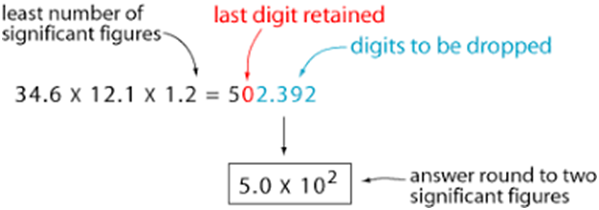
• For a number greater than 1, without any decimal, the trailing zero(s) are not significant.
• For a number with a decimal, the trailing zero(s) are significant.
Rules for Arithmetic Operations with Significant Figures
(1) In multiplication or division, the final result should retain as many significant figures as there are in the original number with the least significant figures.
![]()
(2) In addition or subtraction, the final result should retain as many decimal places as there are in the number with the least decimal places.
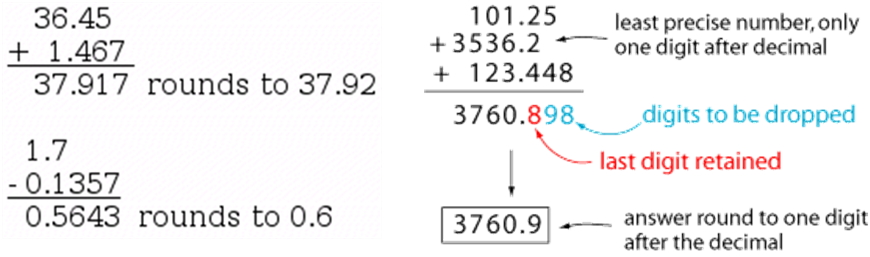
Rounding off the Uncertain Digits
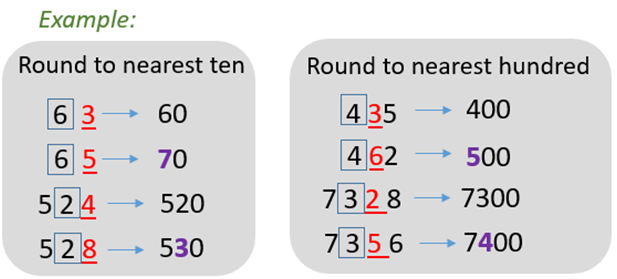
(i) If the digit dropped is less than 5, then the preceding digit is left unchanged.
(ii) If the digit to be dropped is more than 5, then the preceding digit is raised by one.
(iii) If the digit to be dropped is 5 followed by digits other than zero, then the preceding digit is raised by one.
(iv) If the digit to be dropped is 5 or 5 followed by zeroes, then the preceding digit is left unchanged if it is even.
(v) If the digit to be dropped is 5 or 5 followed by zeroes then the preceding digit is raised by one if it is odd.
Selected prefixes used in metric system
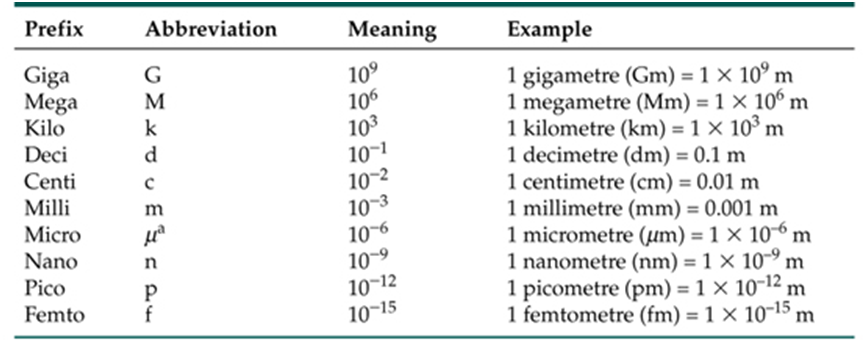
3. Dimensions
Dimensions
Each derived quantity requires proper power for fundamental quantities so as to represent it. The powers of fundamental quantities, through which they are to be raised to represent unit-derived quantity, are called dimensions. In other words, the dimensions of a physical quantity are the powers to which the base quantities (fundamental quantities) are raised to represent that quantity.
Thus, the dimensions of a physical quantity are the powers(or exponents) to which the fundamental units of length, mass, time, etc. must be raised to represent it or the dimension of the units of a derived physical quantity is defined as the number of times the fundamental units of length, mass, time, etc appear in the physical quantity.
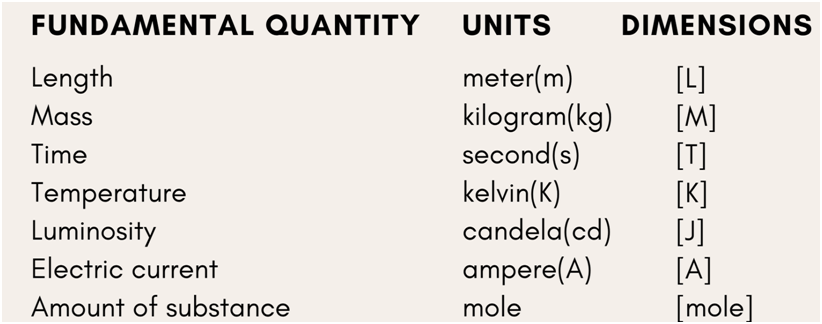
A few examples are :
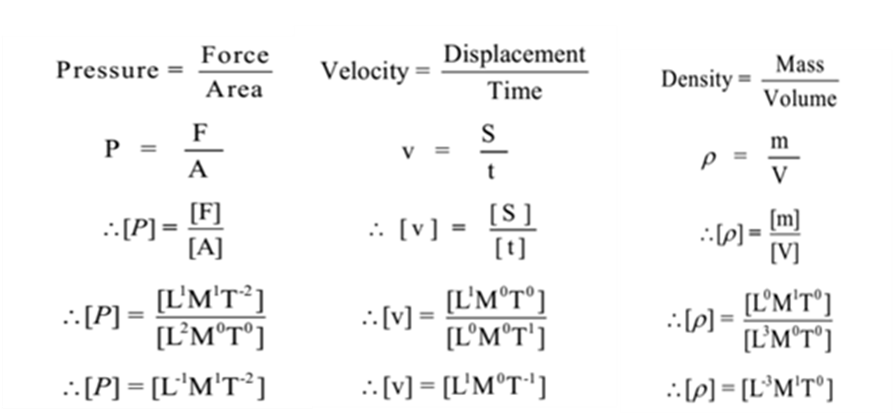
Some Physical quantities and their dimensions
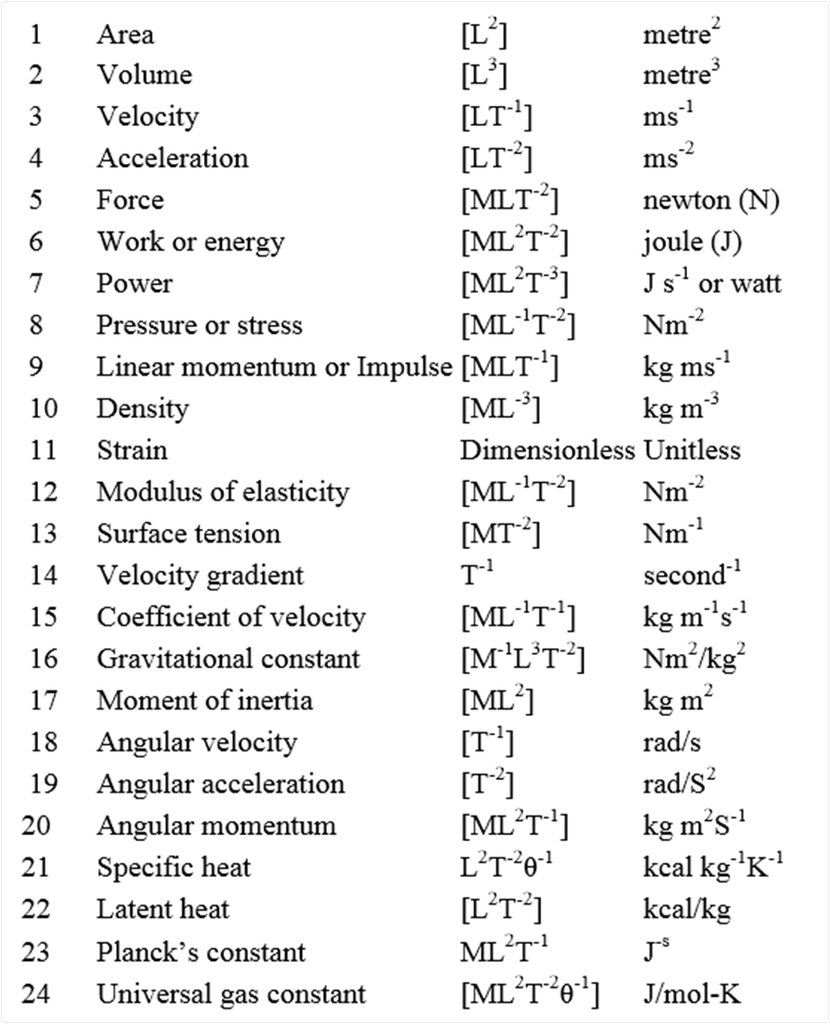
Dimensional Analysis
Dimensional analysis is the practice of checking relations amongst physical quantities by identifying their dimensions and units of measurement. However, dimensional analysis is possible only if the dimensions of various terms on either side of the equation are the same. This rule is known as the principle of homogeneity of dimensions. The principle is based on the fact that two quantities of the same dimension only can be added, subtracted, or compared.
Also, dimensional analysis is an amazing tool for checking whether or not equations are dimensionally correct. It is also possible to use dimensional analysis to generate plausible equations if we know the quantities involved. Quantification of the size and shape of things can be done using dimensional analysis. The mathematical study of the nature of objects is possible today, thanks to dimensional analysis.
We have already learned to express most physical quantities in terms of basic dimensions. We will now learn about dimensional analysis and its applications with the help of fundamental quantities like mass, length, time, etc.
Principle of Homogeneity of Dimensions
The equations depicting physical situations must have the same dimensions. This principle is based on the fact that only two quantities of the same dimension can be added, subtracted, or compared.
The principle of Homogeneity states that “dimensions of each of the terms of a dimensional equation on both sides should be the same.”
As in the above equation dimensions of both sides are not the same; this formula is not correct dimensionally, so it can never be physically accurate.
An equation of the form
For example :
By substituting dimensions of the physical quantities in the above relations
As in the above equation, dimensions of both sides are not the same , the formula is not correct dimensionally , so it can never be physically accurate.
Note
- If
- A dimensionally correct equation may not be physically correct, but a physically correct equation must be dimensionally correct.
Dimensional Analysis as Factor Label Method
Units can be converted from one system to the other. The method used for this is called the factor label method, unit factor method, or dimensional analysis.
In this method, a unit can be converted from one system to another by using a conversion factor that describes the relationship between units. It is based on the fact that the ratio of each fundamental quantity in one unit with their equivalent quantity in another unit is equal to one.
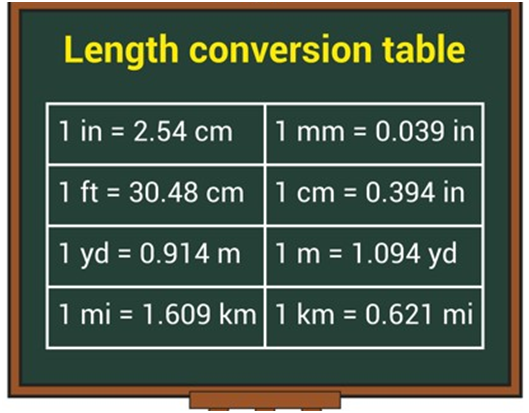
For example:
How many minutes are there in 5 hours?
Solution :
(Here the conversion factor from hours to minutes is 60)
We use conversion factors accordingly so that the answer comes in the desired unit and biased results are avoided. In this way, each fundamental quantity like mass, length, and time is converted into another desired unit system using the conversion factor.
Applications of Dimensional Analysis
Dimensional analysis is used to solve problems in real-life physics. We make use of dimensional analysis for five prominent reasons:
- Finding unit of a physical quantity in a given system of units
- Finding dimensions of physical constant or coefficients
- Converting a physical quantity from one system to the other
- Checking the dimensional correctness of a given physical relation
- Tool for research to derive new relations
1. Finding Unit of a Physical Quantity in a Given System of Units
James Clerk Maxwell and Jenkin invented the dimensional formula in the early 1860’s for unit conversion, and the modern concept of dimension started in 1863 with Maxwell. He synthesized earlier formulations by Fourier, Weber, and Gauss.
To write the formula of a physical quantity, we find its dimensions using dimensional analysis. Now in the dimensional formula replacing M, L and T with the fundamental units of the required system, we get the unit of the physical quantity.
However, sometimes to this unit, we further assign a specific name, e.g.,
Work = Force×Displacement
So ,
2. Finding Dimensions of Physical Constant or Coefficients
Dimensions of a physical quantity are unique and special. We write an equation by putting a proportional constant calculated by substituting the dimensional formulae of all other physical quantities.
(i) Gravitational constant: According to Newton’s law of gravitation
Substituting the dimensions of all physical quantities
(ii) Planck constant: According to Planck
Substituting the dimensions of all physical quantities
(iii) Coefficient of viscosity: According to Poiseuille’s formula
Substituting the dimensions of all physical quantities
3. Converting a Physical Quantity from One System to the Other
The measure of a physical quantity is
If a physical quantity X has the dimensional formula
Respectively.
n2=
Where, M1, L1 and T1= basic units of mass, length, and time in the first (known) system
M2, L2 and T2= basic units of mass, length, and time in the second (unknown) system
Example: conversion of Newton into dynes.
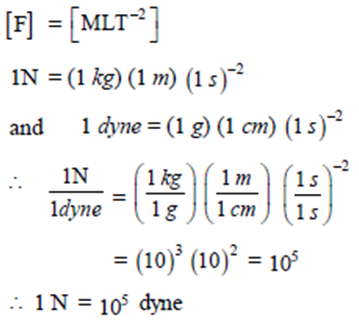
4. Checking the Dimensional Correctness of a Given Physical Relation
This application is based on the principle of homogeneity of dimensions. According to this rule, only those terms can be added or subtracted with the same dimensions.
If
Then according to the principle of homogeneity
If the dimensions of each term on both sides of an equation are the same, then the equation is dimensionally correct.
Example:
By substituting respective dimensions of the physical quantities in the above equation –
As in the above equation, the dimensions of each term on both sides of an equation are the same; the equation is dimensionally correct. However, from equations of motion, we know that
5. Tool for Research to Derive New Relations
Suppose one knows the dependency of a physical quantity on other quantities which is of the product type. In that case, using the dimensional analysis method, a relation between the quantities can be derived.
Derivation of stoke’s law using dimensional Analysis
The force of viscosity on an object in a fluid depends on the radius of the object, coefficient of viscosity and its velocity in the fluid.
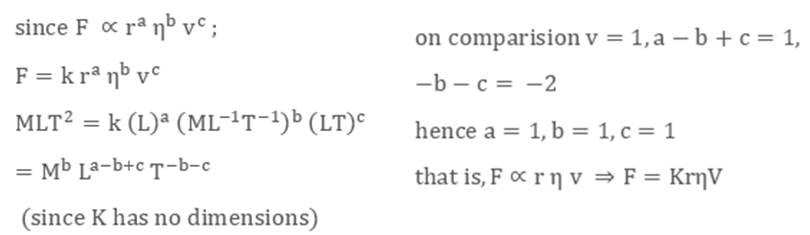
From the dimensional analysis we have
So viscous force
Derivation of centripetal force using dimensional analysis.
Centripetal force required to move an object in a circular path depends on its mass, velocity and radius of the circular path.
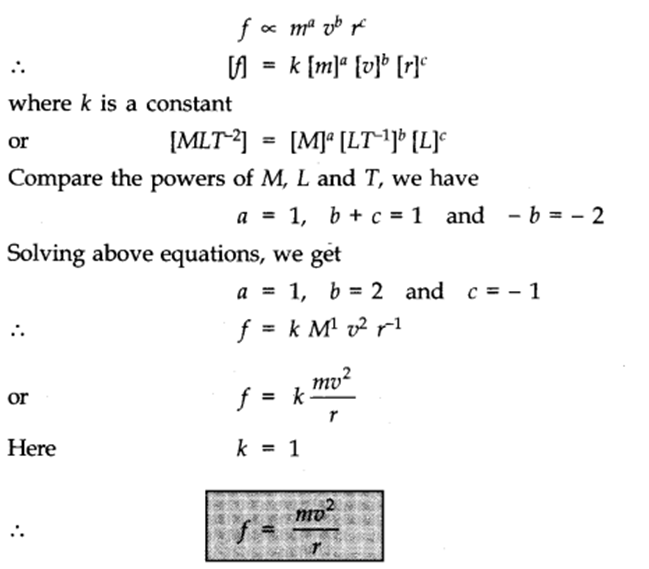
2. Uniform accelerated motion
Acceleration
Acceleration is the rate of change in velocity. It is a scalar quantity. Acceleration can be positive, negative and zero. It basically tells us how fast the speed of the object is changing.
In the velocity-time graph, the slope of the velocity-time graph gives acceleration.
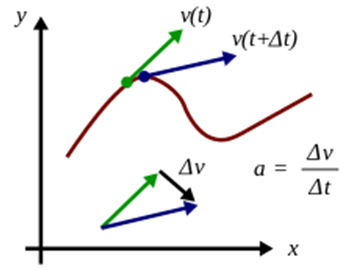
In the figure given below, In the first case, the direction of velocity and the acceleration is opposite and hence the car is slowing down. This is an example of negative acceleration. In the second case, the direction of velocity and acceleration is in the same direction and acceleration is said to be positive acceleration and the car is speeding up.
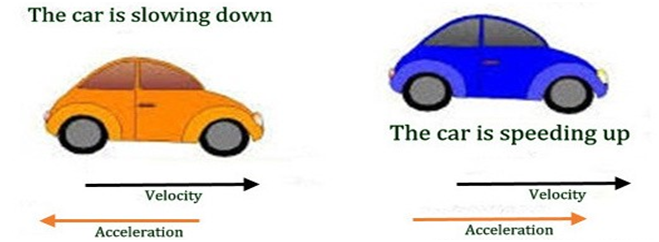
When the motion of the object is not uniform and the speed of the object changes with time. Then motion is said to be accelerated motion.
Example of negative acceleration
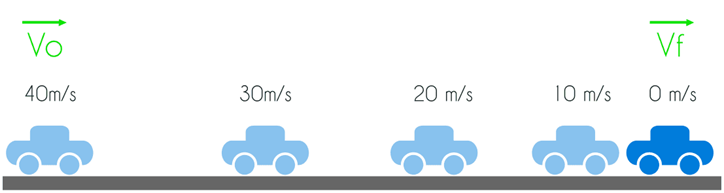
In the example given above the direction of motion is toward the right and its speed decreases continuously so the acceleration is opposite
to the motion and hence this is an example of negative acceleration.
Here ,
There are two kinds of accelerated motion.
- Uniform accelerated motion
- Non-uniform accelerated motion
Uniform accelerated motion -change of velocity is constant.
If a vehicle maintains a constant or a uniform change in its velocity in a given time interval along a straight line, then the vehicle is said to have a constant acceleration motion. Its motion is called uniform accelerated motion.
In the figure is given below a car is moving with acceleration
So it changes its velocity by 2m/s every second.
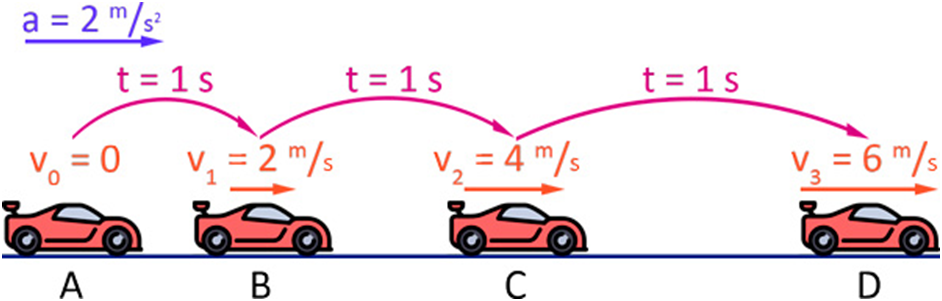
Velocity-time graph and displacement time graph for uniformly accelerated motion
Freefall is an example of uniform accelerated motion
The V-t graph of uniform accelerated motion is a straight line, the slope of which gives the value of acceleration and the area under the curve gives the displacement.
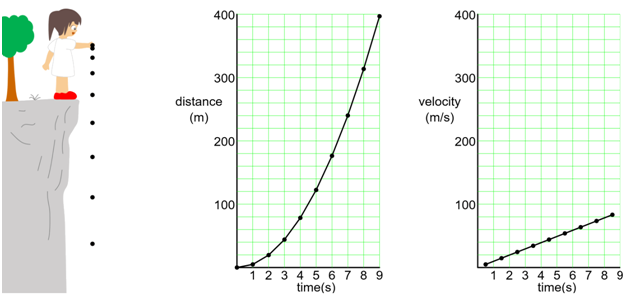
Equations of uniform accelerated motion
To solve the problems related to uniform accelerated motion, we have a set of equations.
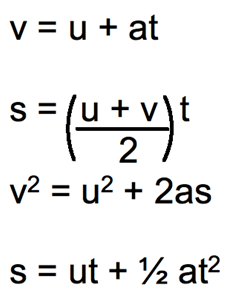
Here , v= final velocity ; u= initial velocity ; s= distance traveled
a= acceleration ; t= time taken.
Non-uniform accelerated motion:
An object is said to be in non-uniform acceleration if the velocity of the object changes by unequal amounts in equal intervals of time.
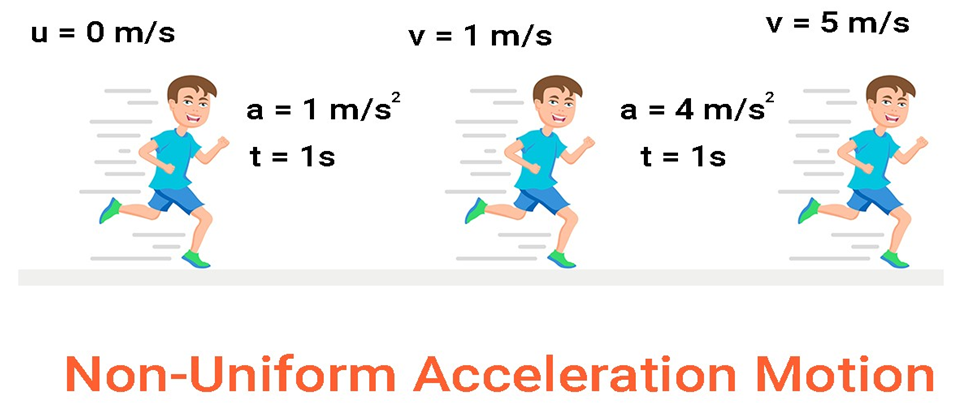
Position -Time and velocity-Time graph
We have discussed the position-time graph and velocity-time graph with each topic. Let us now see all possible types of position-time graphs with different kinds of motions.
Slope of the position-time graph gives velocity. The greater the slope faster the body moves.
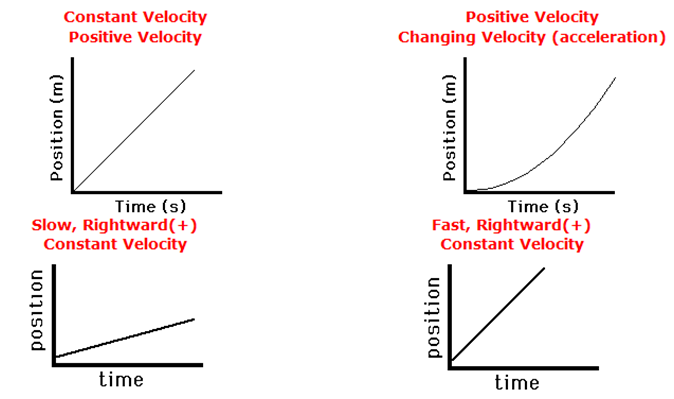
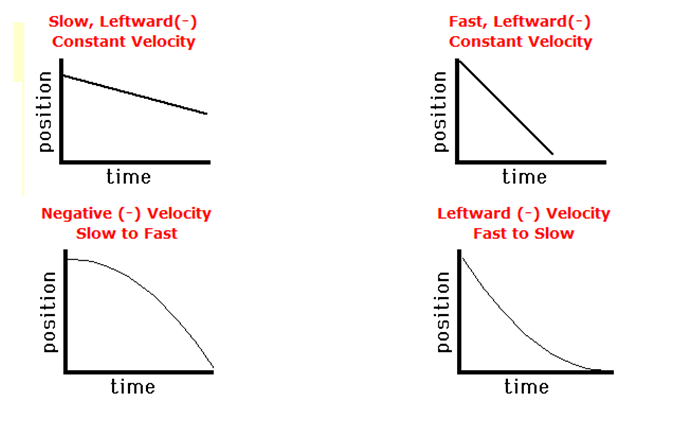
Now we will recap the velocity-time graph for different kinds of motions.
Slope of the velocity-time graph gives the value of acceleration.
The area under the curve of the v-t graph gives the value of the distance traveled.
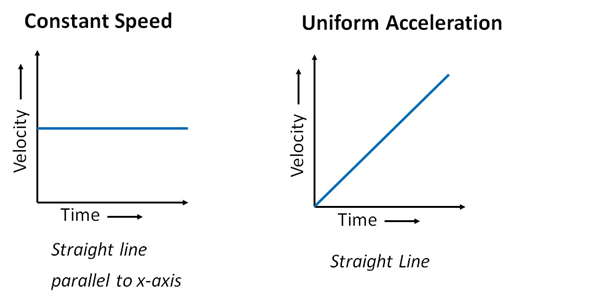
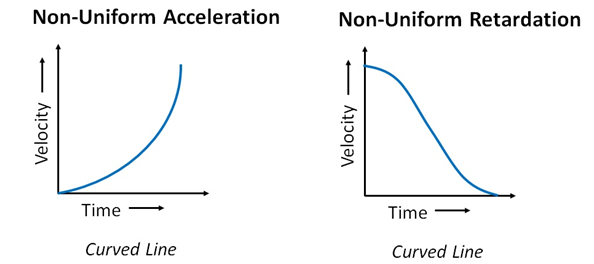
Derivation of the equation using the graphical method
We can derive the equation of accelerated motion using a graphical method by using the property of the v-t graph.
- Slope of the v-t graph gives acceleration.
- Area under the v-t graph gives distance traveled.
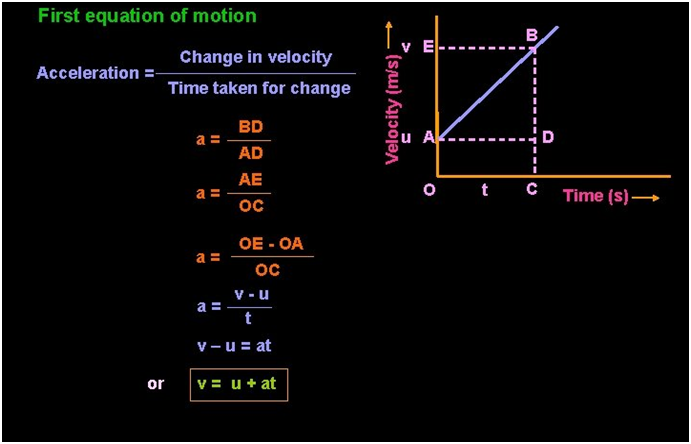
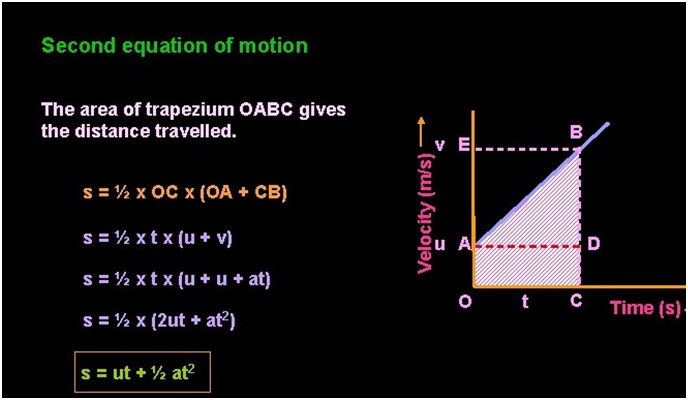
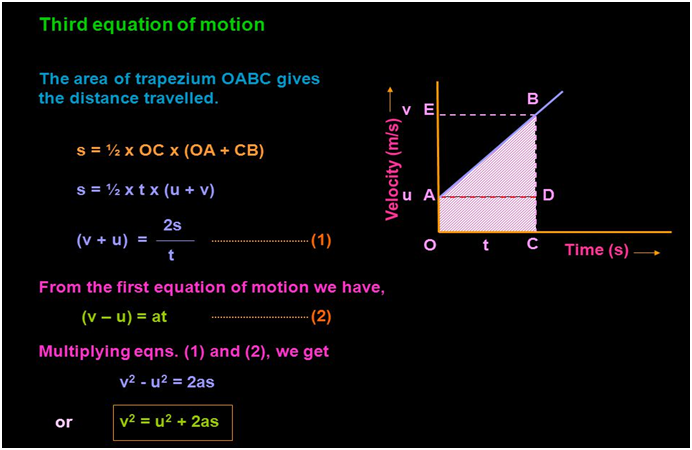
2. resolution of vectors
Relative velocity
Relative velocity is the velocity of one object with respect to another object.
Every motion is relative as it has to be observed with respect to an observer. Relative velocity is a measurement of the velocity of an object with respect to another observer. He is defined as the time rate of change of relative position of one object with respect to another.
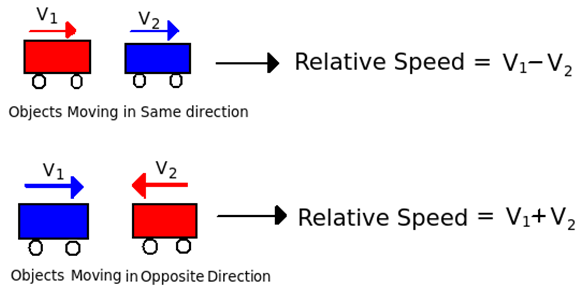
Most of you must have traveled on a train someday, you would have probably noticed that the other train crossing your train from the opposite side seems to be moving at a very high speed, It is because the relative velocity of the other train is the sum of your train speed and its actual speed.
Unit vectors
Unit vector is a vector with unit magnitude. It is used to specify direction.
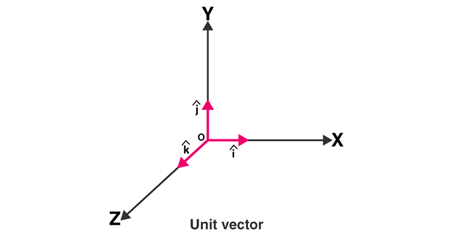
- We can define the unit vector of any vector. Unit vector of a vector is of unit length and along with the same direction as that of the vector
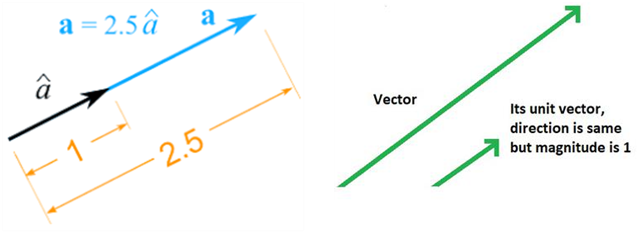
- If we have a vector
And the magnitude of the vector A is given by
Then unit vector of
Below is one the example


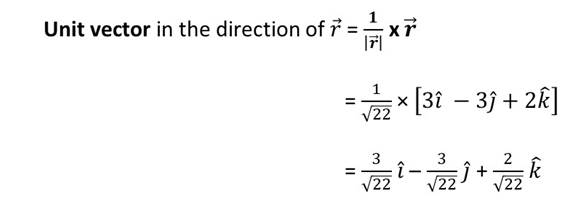
![]()
Resolution of a vector in a plane
Consider a vector in x-y plane
Here ax and ay is the x and y component of Vector A.
Suppose vector A makes an angle θ with the horizontal then
ax= |a| cosθ and ay= |a| sinθ where |a|= magnitude of vector a
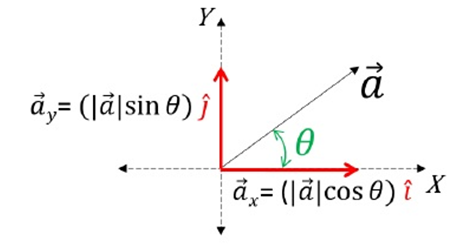
We have two ways to specify a vector
- When we have the magnitude of the vector A and angle θ made with the horizontal.
- When we have its horizontal and vertical components Ax and Ay.
If there are two ways to represent the same vector, there must be some relation connecting the two representation
The magnitude of vector A
Similarly, we can resolve any vector quantity in its horizontal and vector component as shown above.
In the figure below the velocity vector with magnitude 50m/s which is at 60 degrees from the horizontal is resolved.
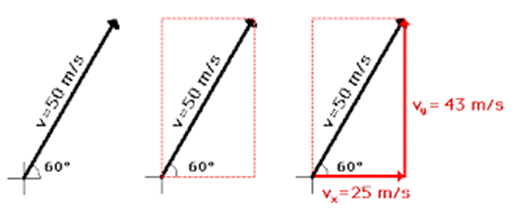
Another example of the resolution of force. Suppose a dog is held by its neckband with a force of 60 N acting at an angle of 40 degrees with the horizontal.
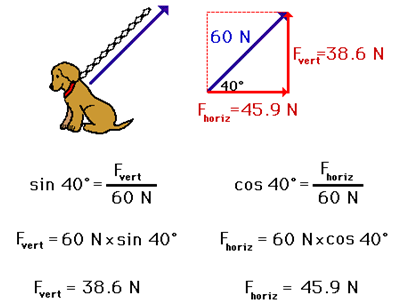
Vector Addition by rectangular components.
Finding the resultant of the vectors by using the component method.
Suppose we have two vectors given below and we need to find the resultant of these two vectors.
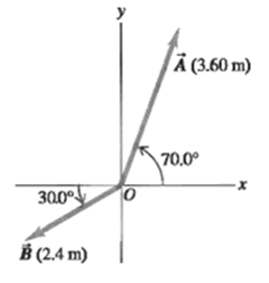
- First we will resolve the two vectors in their components and write them in vector notation.
- Vector A makes an angle of 70 with the positive horizontal direction( +x axis) and has a magnitude A= 3.6 m.
So vector
- Similarly, vector B has a magnitude of 2.4 and makes an angle of 30 with the negative x-axis. When we resolve vector B, the components Bx and By are along the -x and -y-axis as this vector is in the third quadrant.
- Now we have vector A and Vector B, we will now do the vector addition. We will add
- Here the
- Now
Therefore it makes 68.744 degrees clockwise with the negative X -axis.
Dot product :
The dot product is one way of multiplying two or more vectors. The resultant of the dot product of the vector is a scalar quantity, That’s why the dot product is also called a scalar product.
Suppose we have two vectors a and b with components (a1, a2, a3 ) and (b1, b2, b3)
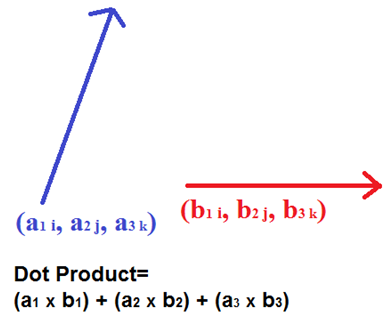
Then the dot product of vectors a and b will be given as
When the magnitudes of vectors and the angle between them is given then the dot product
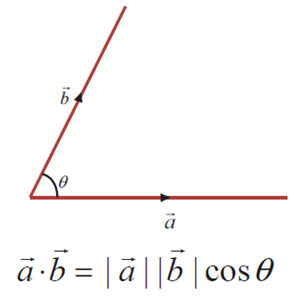
A Properties of dot product:
- The dot product of two perpendicular vectors is zero. Two vectors are orthogonal only when
- Dot product is commutative.
- Dot product is distributive.
- Scalar multiple property :
- Since i, j and k are the unit vectors along the x, y and z-axis. These unit vectors are perpendicular to each other.
So ,
Also ,
Let me show you this with an example
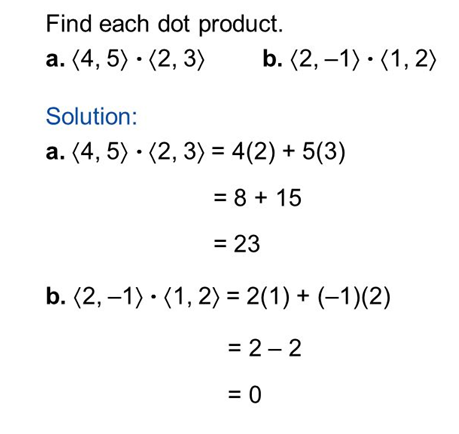
Cross product
The Vector product of the two vectors refers to a vector that is perpendicular to both of them. In other words, we can say that the cross-product of two vectors is a vector that is orthogonal to both.
If we have two vectors a and b and the angle between them is θ
Then
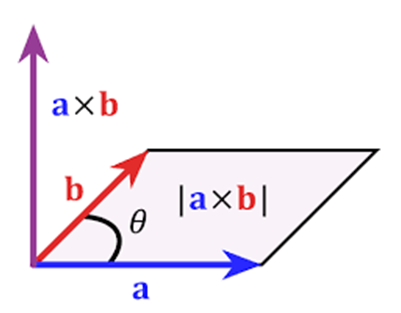
When the two vectors a and b have components (
(
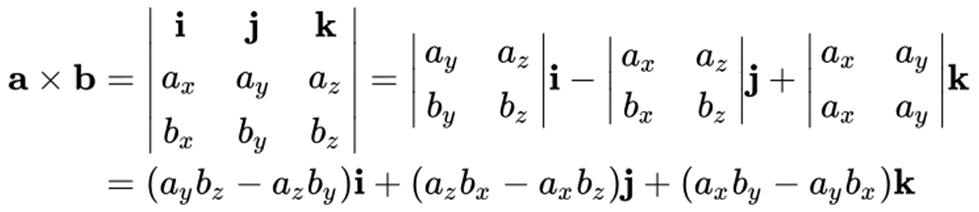
Let me show a solved example
Suppose we have two vectors x1 and x2 with components (2,-3,1) and (-2,1,1) respectively.
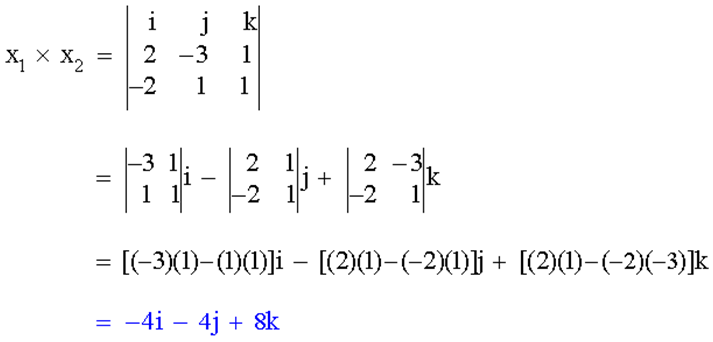
Properties of the cross product
- Cross product is anticommutative :
- Cross product is distributive :
- Cross product of two parallel vectors is zero.
- Cross product of two vectors is equal to the area of the parallelogram formed by two vectors.
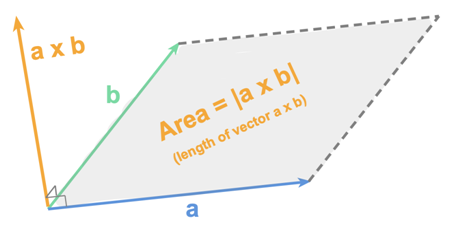
- The direction of the cross product is given by the right-hand rule.
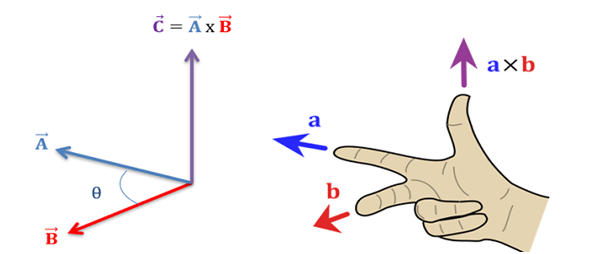
- Cross product of the unit vectors i, j and k will be given as.
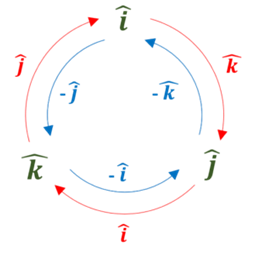
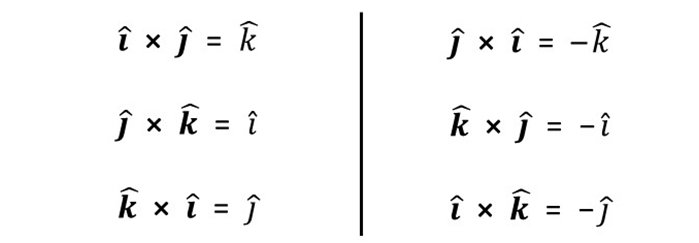
- Also
- Two vectors are parallel if their cross product is zero and vice versa.
3. Motion in 2-D plane
Motion in a plane
Motion is a plane (2-D) that will be difficult to understand if we would treat it like a 2-D motion. For simplicity, we can break the motion of 2-D into two independent motions along with X and Y directions ( two 1-D motions) with which we are already familiar.
We use the equation of motion in 1-D with subscripts x and y for motion along the X and Y direction.
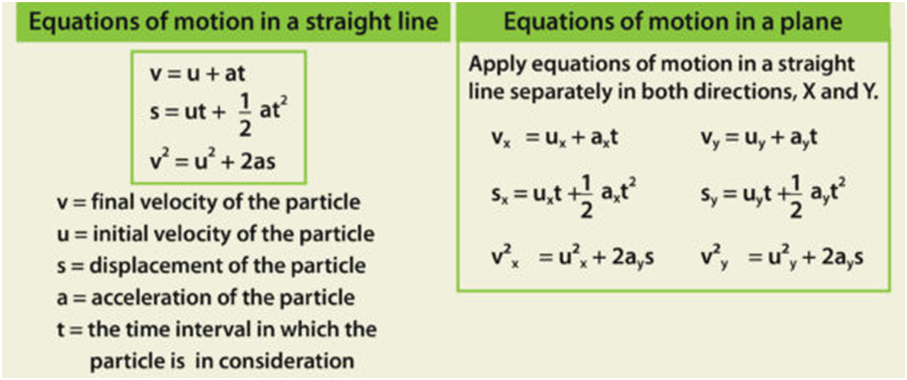
We resolve the force in the X and Y direction and call it Fx and Fy.
Then from the force components, we find acceleration along the x and y-direction.
ax=Fx/m ; and ay= Fy/m
a= ax i + ay j
Then similarly we can resolve the initial velocity ‘u’ along the x and y direction as ux and uy.
Initial speed u= ux i + uy j
Then we can use the equation of motion separately for x and y directions and find the final velocity and displacement along x and y (vx , vy ,x,y).
final speed v= vx i + vy j
displacement r= x i + y j
Projectile Motion
Motion of an object under gravity is called projectile motion.
Projectile motion are of three types: Oblique projectile, horizontal projectile and projectile motion along an inclined plane.
In this discussion, we will discuss oblique and horizontal projectiles.
Figure given below is an example of a horizontal projectile. Here an object is thrown with velocity ‘u’ in the horizontal direction from a height of H and the object follows a projectile path.
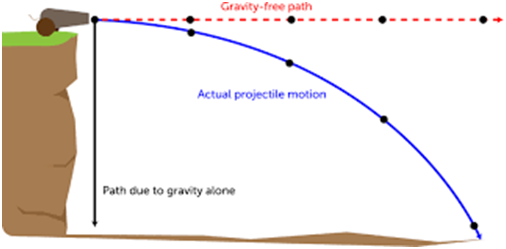
Figure given below is the example of the oblique projectile in which an object is thrown from a ground with velocity u making some angle Ө with the horizontal.
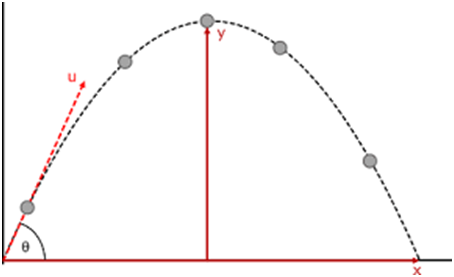
Oblique projectile
In this type of projectile, an object is thrown with the initial velocity ‘u’ which makes an angle θ with the horizontal direction. The only force here is gravity which acts in ‘y direction’. There is no force along the x-axis.
Fx=0 , Fy=mg
Also ax=0 , ay=g (downward)
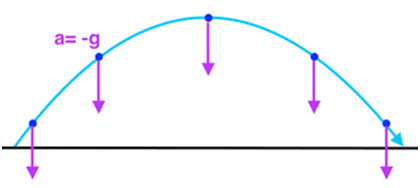
We will discuss and calculate Horizontal distance, maximum height and time of flight T. As you can see from the projectile path shown below that the motion is symmetric about maximum height.
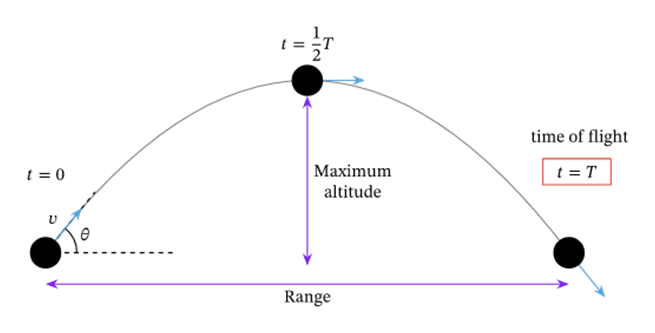
To calculate maximum height and time of flight we will use the ‘y - direction’ motion. And to calculate the range we will use the equation of x-motion.
Since there is a force along only the y-direction hence acceleration to velocity along with the y-axis changes while velocity along y remains the same as no force is acting on x.
Components of initial velocity ‘u’ : ux= u cos θ , uy= u sin θ
Acceleration ax=0 , ay=g (downward)
We know that at maximum height velocity along y will be zero.
Vy=0 at t=T/2 where T= time of flight. Using this we have,
v_(y_ )=u_y+a_y t ; 0=u sinθ -g(T/2) ; u sinθ= g(T/2)
Therefore we have the time of flight T= 2 u sinθ/g
Now we will find maximum height using the 2nd equation of motion, here we will consider the first half of motion. (t=T/2) and y= ymax =H
〖v_y〗^2= u_y+2a_y y ,
0= u^2 sin^2 θ-2gH ; 2gH= u^2 sin^2 θ .
Therefore we have a maximum height of H=u^2 sin^2 θ/(2g)
To calculate the range we need to use x motion. Motion of X direction is uniform motion as ax=0 so , x= U_x*Time of flight
R= u cosθ* (2 u sinθ/g)=u^2 (2 sinθ cosθ)/g= u^2 sin 2θ/g
Therefore we have Range R= u^2 sin 2θ/g
Equation of path of projectile motion.
Let initial position is (x0 ,y0) then y (t) , y as a function of time will be given as
y(t)= y_0+u_y t+ 1/2 gt^2 ; u_y= u sinθ , t=((x-xo))/(u cosθ)
When (x0 , yo)= (0,0) when object starts from origin
Then equation of path of projectile motion will be given as
y=x tanθ-(g x^2)/(2 u^2 cos^2 θ)
This is an equation of a parabola and hence we get a parabolic path for an object moving in a plane under gravity.
Discussion over oblique projectiles.
- Range of the projectile is maximum for θ=45.
R=u^2 sin2θ/g R is max when sin 2θ=1; 2θ=90; θ=45
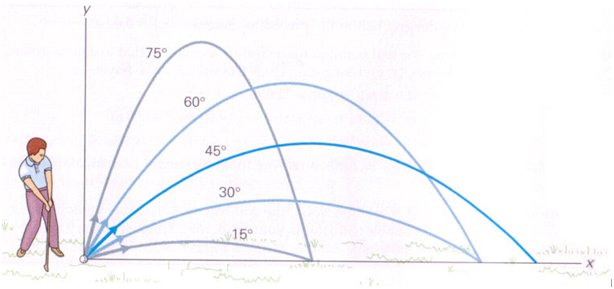
- Projectile for different initial speeds for a given angle.
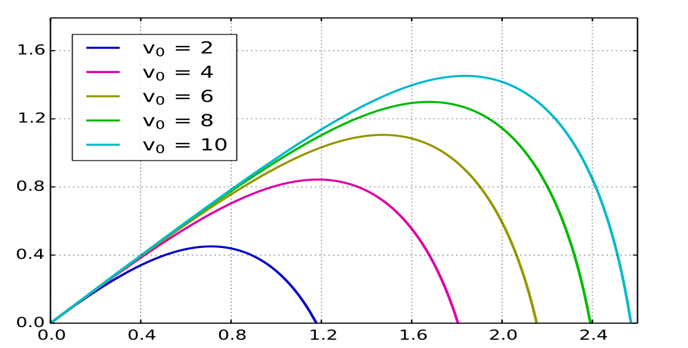
- The velocity with which the object strikes the ground is same as with it was thrown.
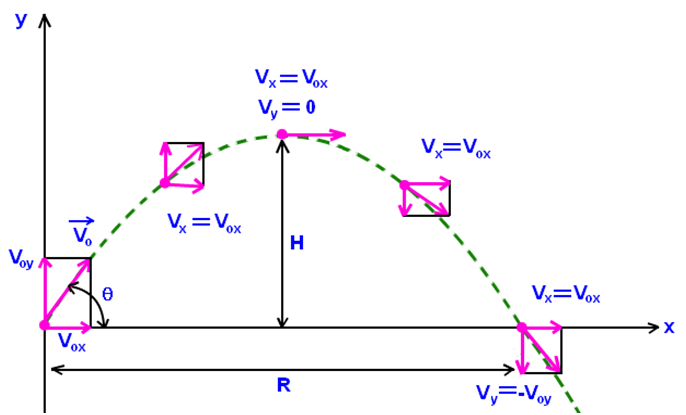
Horizontal projectile
In a horizontal projectile, an object is thrown from a height ‘ h’ with a horizontal velocity ‘vo’. Here the only force acting on the object is gravity.
There is no force acting in the horizontal direction. This is exactly like an oblique case.
Fx=0 , Fy=mg
Also ax=0 , ay=g (downward)
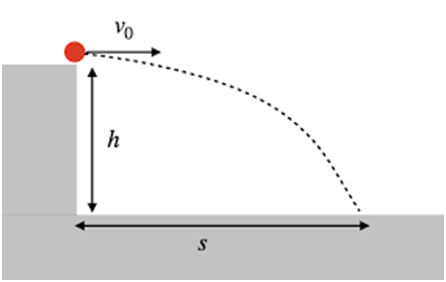
We can find the time of flight ‘T’, horizontal distance ‘s’ and final velocity ‘v’ by using the equation of motion in x and y directions.
To find the time of flight we will use the equation of motion in the y-direction
Here Y=h, uy=0 as initially there was only horizontal velocity ‘vo’
y=u_y t+1/2 gt^2 ; h= 0+ 1/2 gt^(2 ) ; t^2=2h/g ; t=√(2h/g)
Therefore the time of flight T=√(2h/g)
Now to find the horizontal distance traveled we will use motion along the x-direction. As motion along the x-direction is uniform motion
So X distance= speed in x-direction* time of flight
s= vo √(2h/g)
Therefore horizontal distance traveled is s= vo √(2h/g)
To find the final velocity of the object we need to use both motions along x and y-direction. We will find the final velocity along the x and y direction and then find its magnitude.
v_y=u_y+ a_y t ; v_y=0 +gt=g √(2h/g)
Thus final velocity along y v_y=√2gh
Final velocity along x v_x=vo, as there is no change in velocity along the x-direction.
The magnitude of final velocity v=√(vx^2+ vy^2 )= √( vo^2+2gh)
As you can see in the illustration given below the horizontal remains the same but the vertical velocity was initially zero but keeps on increasing as the object is falling.
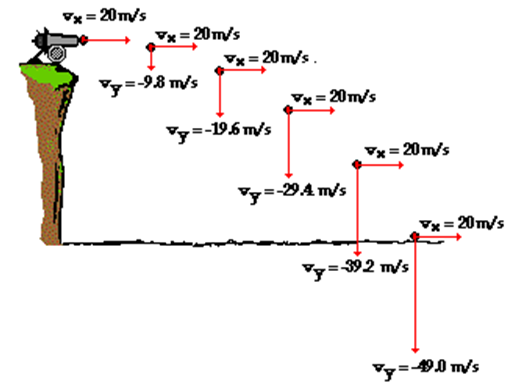
Example of horizontal projectile
Consider a horizontal projectile with an initial speed vo= 10 m/s. It is given that it takes 5 seconds to reach the ground level. We have to find the height, final vertical velocity and the horizontal distance traveled.
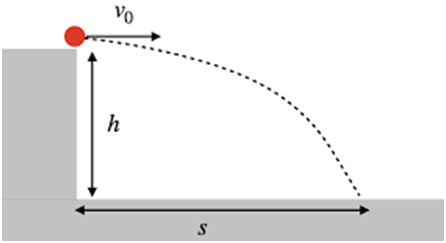
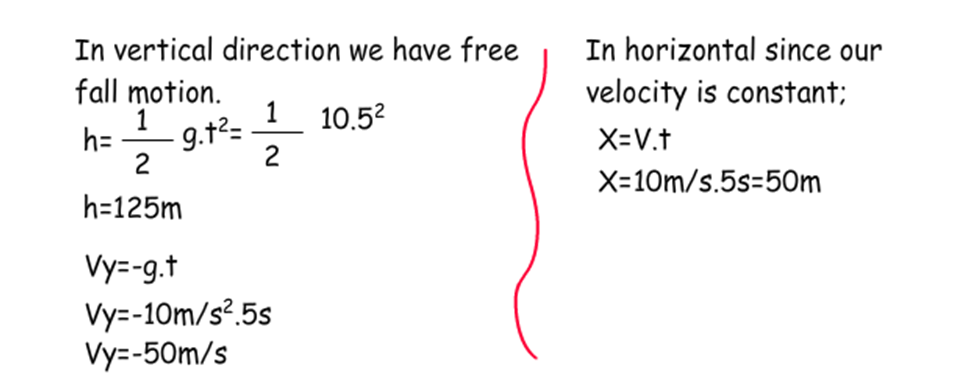
Uniform circular motion
Motion of an object in a circular path with uniform speed is called uniform circular motion.
In a uniform circular motion, the speed of the object remains the same but the velocity changes throughout the motion as the direction of velocity changes. As you can see from the picture given below that velocity is always tangent to the path and its direction changes continuously.
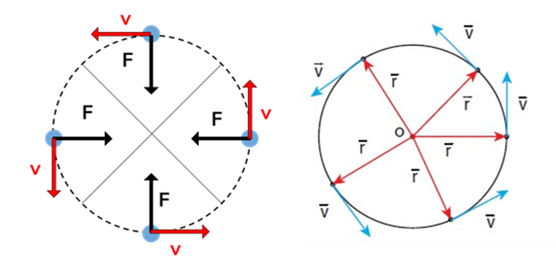
Force needed to keep the object moving in the circular path is called centripetal force which is always directed towards the center. So there is an acceleration acting on the particle which is toward the center and called centripetal acceleration.
We have centripetal force Fc= -m v^2/r and hence centripetal acceleration a_c= 〖-v〗^2/r, where r is the radius of the circle.
Time period of uniform circular motion T= circumference/ velocity
T=2Πr/v, this would be the time taken by the particle in one complete revolution.
Frequency of the uniform circular motion f=v/2Πr
Angular frequency ‘w’ is the rate of change of angular displacement θ
w=Δθ/Δt
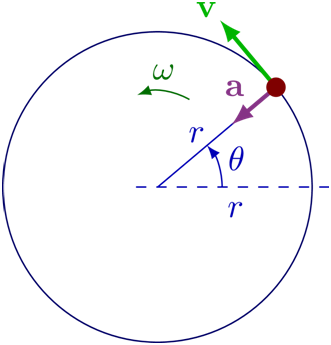
If the distance traveled in Δt is Δs then the velocity will be given as
v=(Δs )/Δt ; here s=rθ ; v=r Δθ/Δt=r w ; v=rw
We can express fc, ac, T, and f in terms of w
centripetal force fc=-m v^2/r=-mw^2 r
centripetal acceleration ac= 〖-w〗^2 r
Time period T= 2Π/w
frequency f= w/2Π
2. equilibrium of force and friction
Conservation of linear momentum and its application
The second law and the third law led to important consequences - the Law of conservation of momentum.
Statement: When the net force on a system is zero, the angular momentum of the system is conserved.
Let’s take an example of a gun and bullet system.
The Gun exerts a force F on the bullet, the bullet also exerts the same force F but in the opposite direction, so the net force on the gun-bullet system is zero. So total linear momentum of the system remains conserved
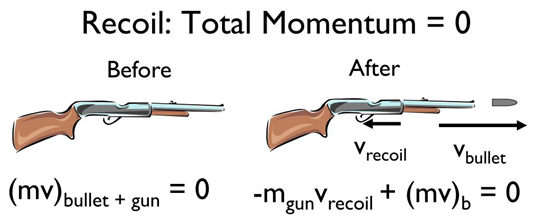
Thus in an isolated system, the mutual force between pairs of particles of the system can cause momentum change in individual particles. Since the mutual forces for each pair are equal and opposite, the momentum changes cancel in pairs and the total momentum remains unchanged. This law is called the law of conservation of momentum.
The important application of the conservation of linear momentum is that when there is a collision between two particles, their momentum before and after the collision is conserved. Momentum conservation holds for both elastic and inelastic collisions.

By conservation of momentum
Another application is rocket propulsion

Rockets have a gas chamber at one end of it. From this chamber, gas ejected with enormous velocity. Before the ejection of the gas, the total momentum is zero. Due to the ejection of the gas from the rocket, the rocket gains a recoil velocity and acceleration in the opposite direction. This is because of the conservation of momentum.
Equilibrium of concurrent forces
Conservation of momentum holds when no force is acting on the system. Gravity and friction forces are such forces that are always there on earth. So in most practical cases, it is not true that no force is acting on the system.
But we can have the net force acting on the system be zero. When all the forces acting on the system balance each other then we can say that the net force on the system is zero and thus conservation of momentum holds for such cases too, this is called equilibrium of concurrent forces.
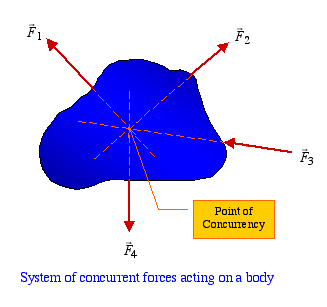
Here
When there are two forces acting on the particle and net force on the particle is zero. We have
Similarly in the case of three concurrent forces F1, F2 and F3
We have
On comparing the components of I, j and k on both sides we have
The sum of the x-component of all the concurrent force=0
Similarly, the sum of y and z components of all the concurrent forces is zero.
Lami’s theorem : Equilibrium of three force
If three concurrent forces are acting on a body kept in equilibrium, then each force is proportional to the sine of the angle between the other two forces and the constant of proportionality is the same.
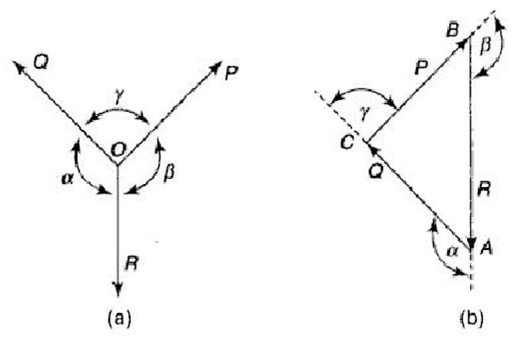
We have
While applying Lami’s theorem in the free body diagram of a body we draw the direction of force either towards or away from the point of concurrency.
Some common forces in Mechanics
There are various kinds of forces in Mechanics. We will discuss contact and non-contact forces here.
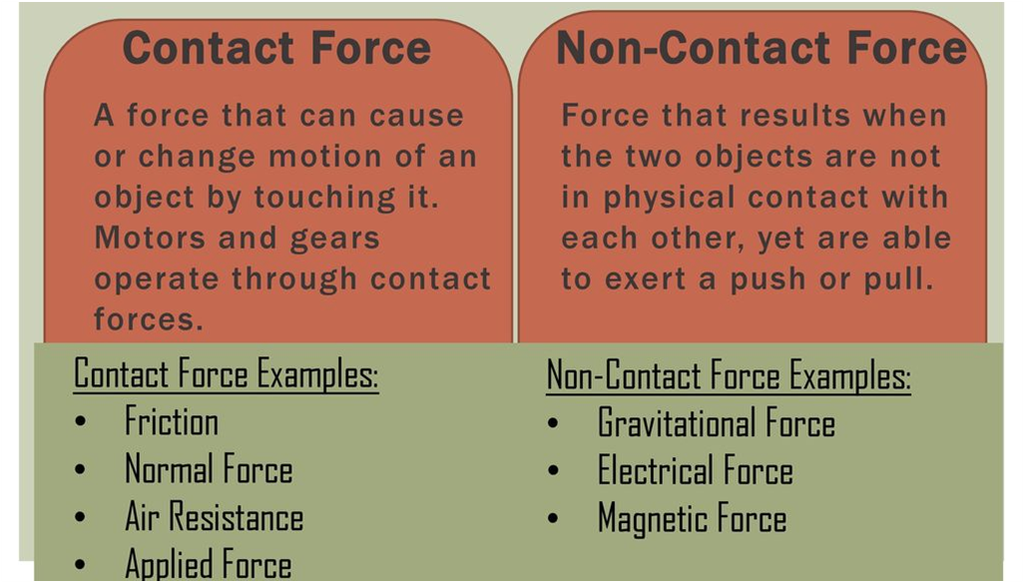
Non-contact force: Does not require direct contact between the body and the agency of force. These forces do not come under the branch of mechanics. We will study them later. For example electrostatics force, magnetic force etc.
Contact force: which requires direct contact between the body and the agency. Some of the contact forces are Tension force, normal force, friction force, spring force, etc.
Tension force: It is a tension in the string due to which it balances the madd tied to it. A tension force is a force developed in a rope, string, or cable when stretched under an applied force. This force is acted along the length of cable/rope in a direction that is opposite to the force applied to it.

Normal force: The normal force is the force that surfaces exert to prevent solid objects from passing through each other. If two surfaces are not in contact they can’t exert a normal force on each other.
For example: If a book is resting upon a surface, then the surface is exerting an upward force upon the book in order to support the weight of the book.
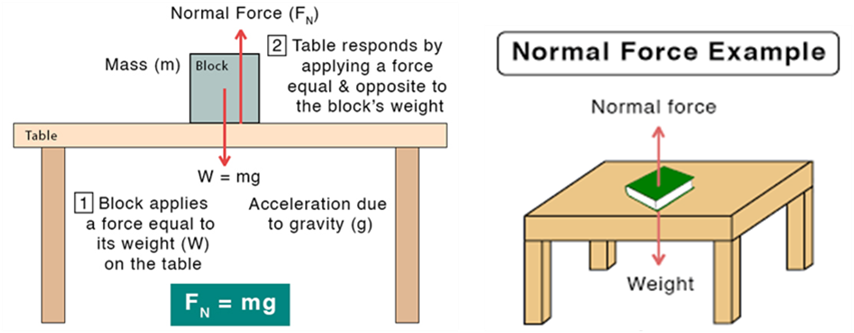
Friction force: When two objects are in contact and one object moves or intends to move, then a force develops between the two surfaces called frictional force.
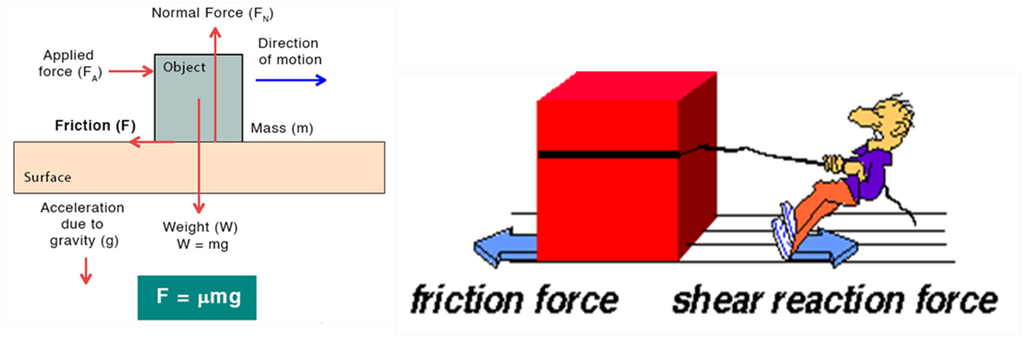
Force in the spring
It is the restoring force that restores the spring to its original length. Spring force is the force required or exerted to compress or stretch a spring. When an object applies a force to a spring, then the spring applies an equal and opposite force to the object.
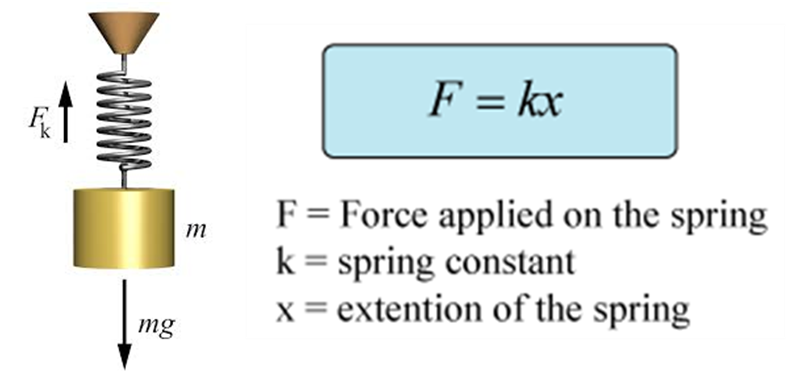
Pseudo forces: When we observe any object with respect to an accelerated body then there is a force acting on the object which we are observing. This force is called pseudo force. This is an imaginary force.
For example: If we are sitting in an accelerating car and observing the body outside the car, then a pseudo force will act on that body.
Static and kinetic friction

Have you noticed that when you push a box by applying a force F and it doesn’t move where does this Force F go?
According to Newton’s first law if the object remains at rest then the net force on the body must be zero. The question is which force balances the applied force when the body doesn’t move?
The answer to this question is Friction force.
When we apply a force on the object at rest, there is friction between the object and the surface that opposes the applied force.
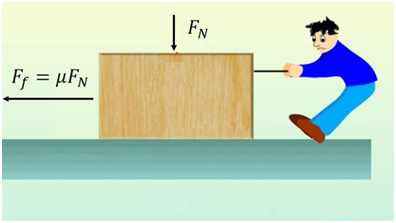
The tangential component of the force of interaction between two surfaces in contact is called friction. It leads to resistance against movement between the surfaces and can cause mechanical deformation and heating. Friction depends on the type of the contacting surfaces. It is high for rough and dry surfaces and low for wet and smooth ones.
When we roll a ball on the floor, it stops after some time due to the force of friction acting on it opposite to the motion.
Types of Friction:
Depending on whether the surfaces are at rest or in relative motion against each other, the friction divides into static and kinetic friction.
Kinetic friction: The retarding force between two objects in contact that are moving against each other is called Kinetic friction.
Where
Kinetic friction remains constant between two surfaces, regardless of the relative speed of their movement. The coefficient of kinetic friction has a constant value for each pair of contacting surfaces (materials). For example it is 0.57 for steel / steel contact, 0.47 for steel / aluminum contact, etc.
Static friction: The force that has to be overcome in order to get something to move is called static friction.
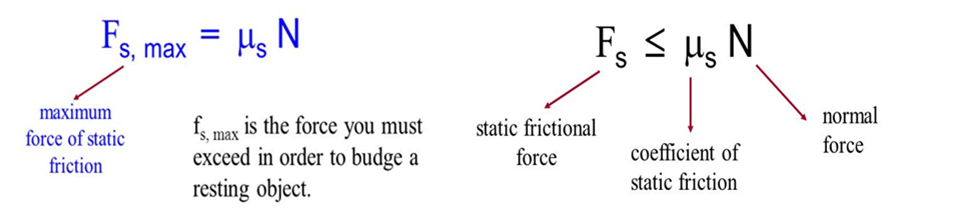
In order to make a stationary object move, we have to overcome the static friction force with an applied force. When a small force is applied to a nonmoving object, the static friction is of equal magnitude, but in the opposite direction to the applied force. When the force is being increased, at a certain point it reaches the maximum static friction value. At that point, the static friction is overcome and the object starts to move.
On solid surfaces, static friction occurs as a consequence of the surface roughness of the objects in contact. Its value depends on the type of the contacting surfaces. It is higher for rough and dry surfaces and lowers for wet and smooth ones.
The force necessary to induce motion is always bigger than the one necessary to continue the motion. So the kinetic friction coefficient is smaller than the static friction one.
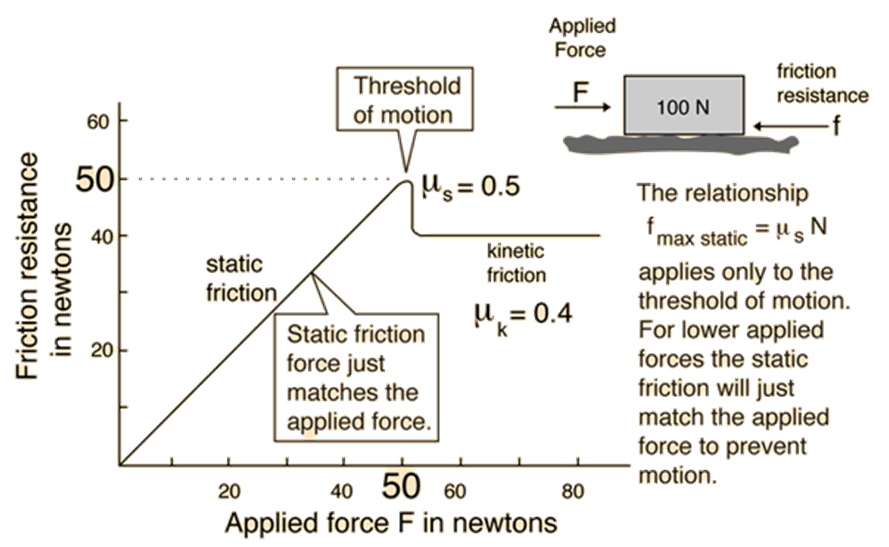
Static and kinetic friction in an inclined plane
This is the force that prevents an object, placed on a sloped surface, from sliding.
When we place an object on an inclined plane and it remains stationary, this happens due to status friction. The gravity force on the object down the slope is actually balanced by the static friction in the opposite direction.
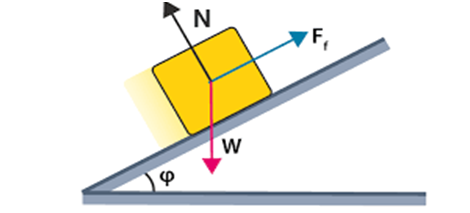
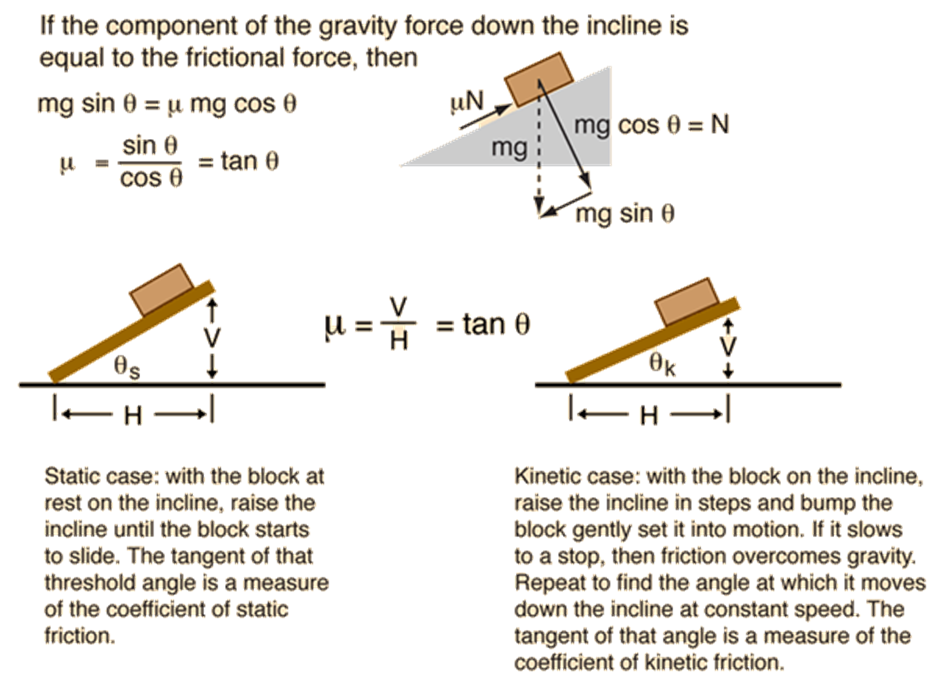
Laws of friction
What are the Laws of Friction?
There are five laws of friction and they are:
- The friction of the moving object is proportional and perpendicular to the normal force.
- The friction experienced by the object is dependent on the nature of the surface it is in contact with.
- Friction is independent of the area of contact as long as there is an area of contact.
- Kinetic friction is independent of velocity.
- The coefficient of static friction is greater than the coefficient of kinetic friction.
Rolling friction
Rolling friction occurs when a wheel, ball, or cylinder rolls freely over a surface, as in ball and roller bearings.
A rolling wheel requires a certain amount of friction so that the point of contact of the wheel with the surface will not slip. The amount of grip of the tires on the road which can be obtained for an auto tire is determined by the coefficient of static friction between the tire and the road. If the wheel is locked and sliding, the force of friction is determined by the coefficient of kinetic friction and is usually significantly less.
Assuming that a wheel is rolling without slipping, the surface friction does not work against the motion of the wheel and no energy is lost at that point. However, there is some loss of energy and some deceleration from friction for any real wheel, and this is sometimes referred to as rolling friction. It is partly friction at the axle and can be partly due to flexing of the wheel which will dissipate some energy.
3. Uniform circular motion
Dynamics of uniform circular motion
What is circular motion? A body moving along the circumference of the circle with a constant speed is said to be exhibiting a circular motion.
For example, A car moves in a circular track of radius ‘r’ with velocity ‘v’. Then the circumference of the track will be
The natural tendency of the body is to move uniformly along a straight line. There is a requirement for some additional force to move a body along a circle and that force is called centripetal force.
Centripetal force
The direction of centripetal force and acceleration is always towards the center of the circle.
We know that circular motion can be both uniform and non-uniform. If the tangential component of acceleration is absent, it will be uniform circular motion, and if the tangential component of acceleration is present, it will be non-uniform circular motion. In the case of non-uniform circular motion, the net acceleration of the particle is the resultant of radial acceleration and tangential acceleration.
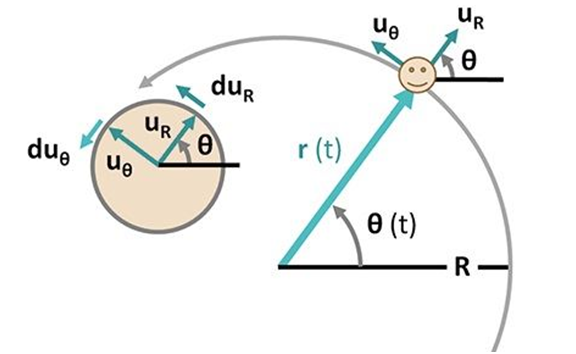
In the case of uniform circular motion, the tangential acceleration is zero so the speed of the object moving along a circular path is constant. There is only centripetal acceleration (negative radial direction) present.
Centripetal force
Suppose you are in an inertial frame of reference and you are observing a particle in a circular motion. The net force on the particle must be non-zero according to the second law of motion since the particle has some acceleration. Let’s take the case of uniform circular motion. The speed of the particle is constant, and the acceleration of the particle towards the center is
If ‘m’ be the mass of the object then centripetal force will be given by
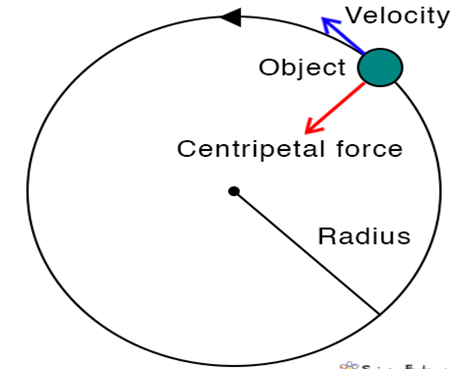
This force is directed towards the center and is therefore known as centripetal force. The centripetal force is required to keep the object in a uniform circular motion. This is just the name given to this type of force and this centripetal force can arise from tension, friction, etc.
Example of circular motion :
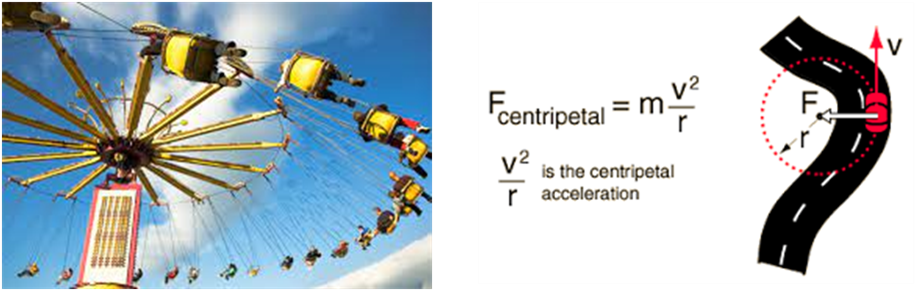
When a moving car on the road takes a turn, the motion of the car on the turn is also an example of circular motion
Turn on a level road
When a car takes a turn on a level road, the kinetic friction between the road and the car provides the necessary centripetal force to the car so that it would move in a circular path near the turn.
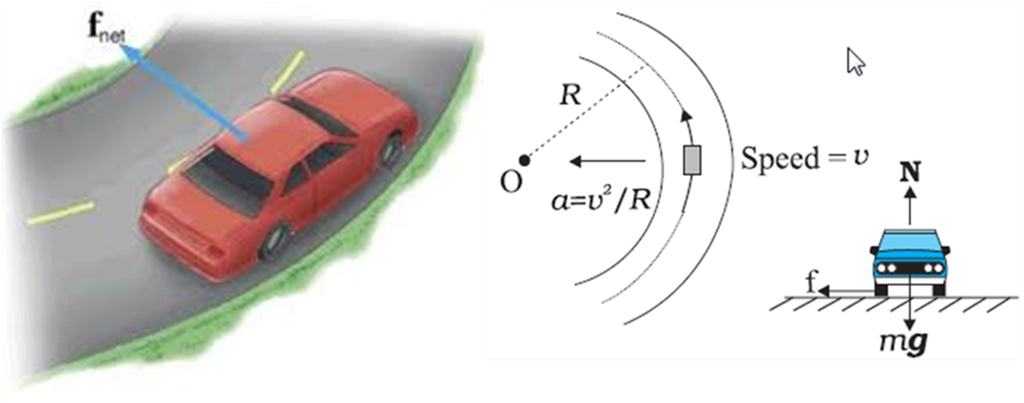
In the figure shown above, we can clearly see that Normal force is balancing the weight of the car on the level road N= mg
And the frictional force is providing the necessary centripetal force. If the speed of the car is such that the required centripetal force exceeds the static friction between the car and the road, then it will no longer be able to move in the circular path. So there is a speed limit to take a safe turn.
Since frictional force provides the centripetal force.
This is the maximum safe velocity of the car in a circular motion in a level rod.
The motion of a car in a circular path on a Banked road
Consider a vehicle of mass m moving with speed v on a banked road of radius R as shown in the diagram. Let θ be the angle of banking. N is the normal reaction exerted on the vehicle by a banked road. Let f be the frictional force between the road and the tires of the vehicle.
In the free body diagram, we can conclude that the vertical component of Normal force ( Ncosθ) balanced weight ( mg ) and fsinθ
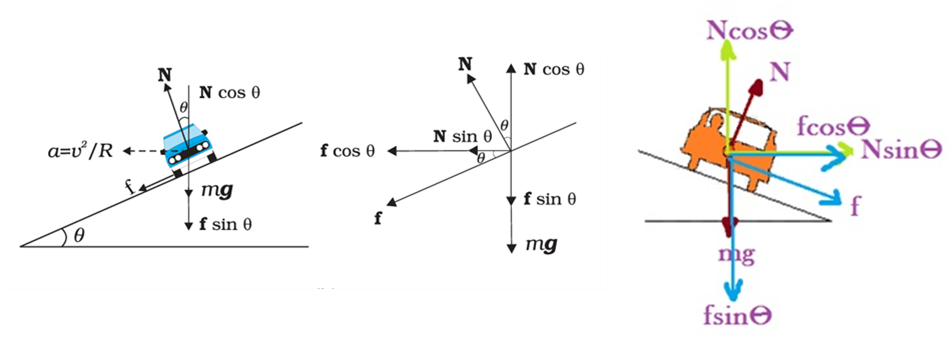
And horizontal component (Nsinθ) and fcosθ provide the necessary centripetal force for the circular motion of a car on a banked road.
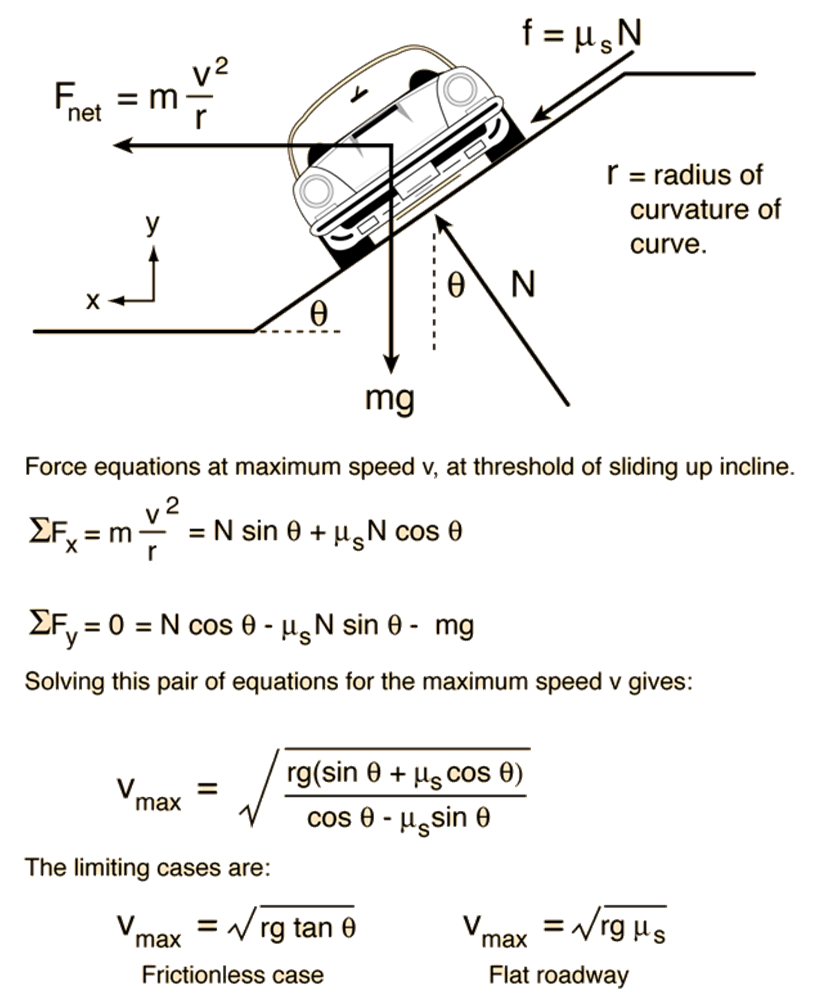
2. Energy
Mechanical energy

An object that possesses mechanical energy is able to do work. In fact, mechanical energy is often defined as the ability to do work. Any object that possesses mechanical energy - whether it is in the form of potential energy or kinetic energy is able to do work.
Example :
A hammer is a tool that utilizes mechanical energy to do work. The mechanical energy of a hammer gives the hammer its ability to apply a force to a nail in order to cause it to be displaced. Because the hammer has mechanical energy (in the form of kinetic energy) it is able to do work on the nail. Mechanical energy is the ability to do work.
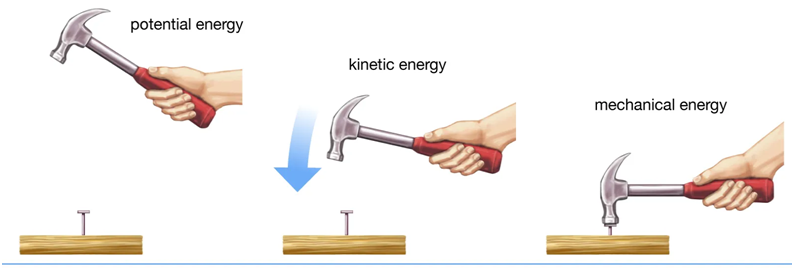
The mechanical energy of a bowling ball gives the ball the ability to apply a force to a bowling pin in order to cause it to be displaced. Because the massive ball has mechanical energy (in the form of kinetic energy), it is able to do work on the pin. Mechanical energy is the ability to do work.

Kinetic energy
kinetic energy is a form of energy that an object or a particle has by reason of its motion. If work, which transfers energy, is done on an object by applying a net force, the object speeds up and thereby gains kinetic energy.
Kinetic energy is a property of a moving object or particle and depends not only on its motion but also on its mass.
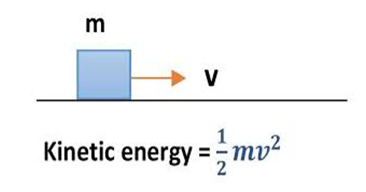
Potential Energy
The energy possessed by the object due to its position and configuration is called Potential Energy.
Potential energy is defined with the conservative force. For example, for the gravitational force, we have gravitational potential energy and for the electric force, we have electrostatic potential energy.
- When a man picks an object of mass ‘m’ from the ground and puts that at height ‘h’. As gravity is pulling the object downward so the man has to do some work to raise the object to a height ‘h’. The work done by the man gets converted into the Potential energy of the object.
- To compress a spring an external force needs to do work. The work done by external force gets converted into the potential energy of the spring.
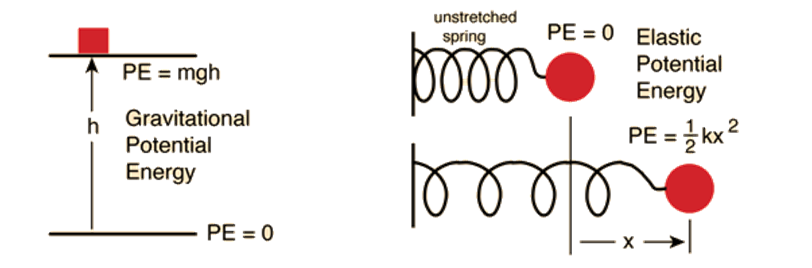
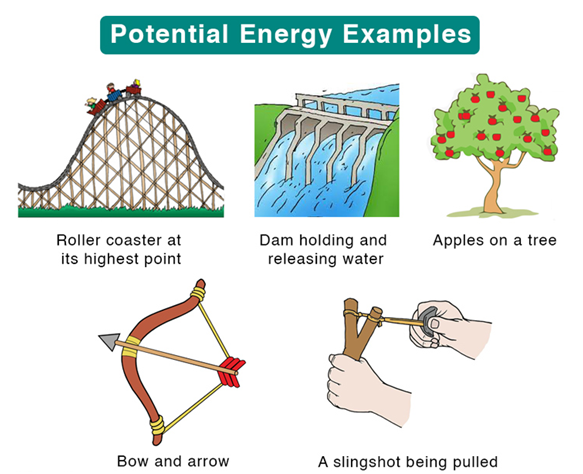
Conservation of total mechanical energy.
For motion under conservative force, we have a conservation law of mechanical energy. When the motion is subjected to only conservative force, the total mechanical energy ( kinetic + potential) of the system remains conserved.
Potential energy and Kinetic energy gets converted into each other such that total mechanical energy remains conserved.
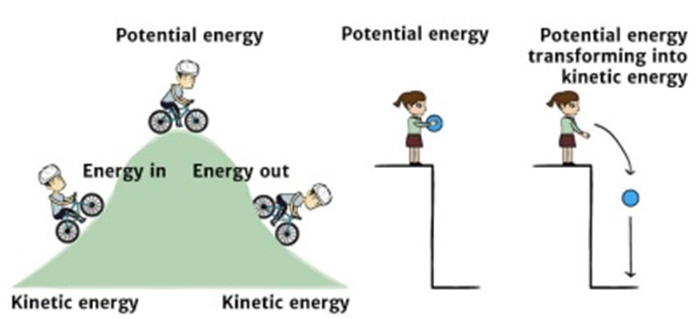
In the first figure given above, the Kinetic energy of the bicycle at the ground gets converted into potential energy at the top and then again gets converted into Kinetic energy at the ground.
In the second figure, a girl at some height holds a ball and then drops it. The potential energy of the ball at height gets converted into kinetic energy as it falls under the effect of gravity.
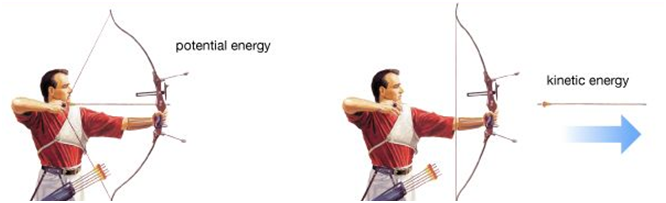
In the above figure, the potential stored in the string of the bow due to stretching gets converted into the Kinetic energy of the arrow
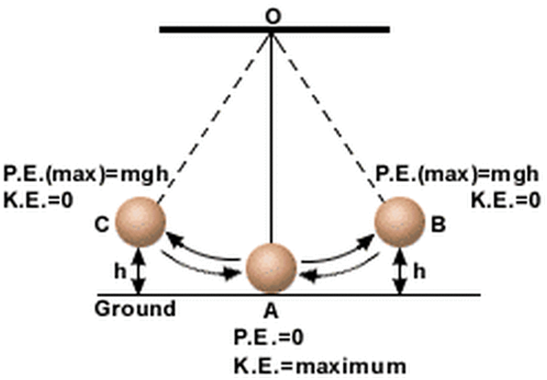
In the case of a pendulum, the motion of the bob is under the force of gravity. At the extreme position on either side Potential energy of the bob is maximum and at the mean position, Kinetic energy is maximum. Total mechanical energy at any instant is constant in the case of Simple harmonic motion.
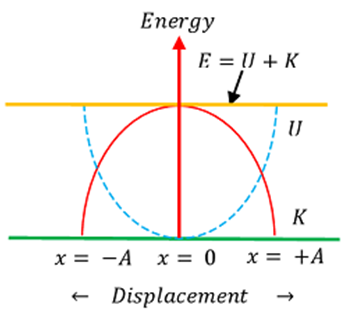
Work-Energy Theorem
Statement: The work-energy theorem states that the net work done by the forces on an object equals the change in its kinetic energy.
Sometimes people forget that the work-energy theorem only applies to the network, not the work done by a single force.
Derivation of the work-energy theorem for the constant force
When F || d ,
From the third equation of motion we have
So now we put the value of d in equation 1
Derivation of the work-energy theorem for variable force
Work done by small displacement
Total work done will be the integration of the dW
Work done in changing the velocity from u to v
Conservative forces
According to the law of conservation of energy in a closed system, i.e., a system that is isolated from its surroundings, the total energy of the system is conserved”. Conservative force abides by the law of conservation of energy. A conservative force is a force that does zero work done in a closed path. If only these forces act then the mechanical energy of the system remains conserved.
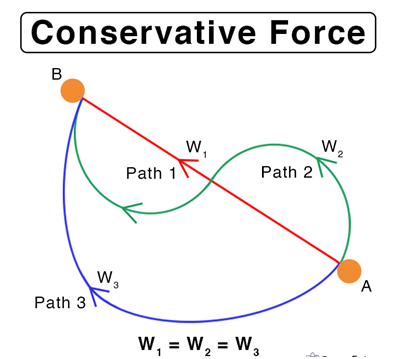
Work done by conservative force= -(change of potential Energy)
Non-conservative forces
Non-conservative forces are dissipative forces such as friction or air resistance. These forces take energy away from the system as the system progresses, the energy that you can’t get back. These forces are path-dependent; therefore it matters where the object starts and stops.
Mechanical energy is not conserved in non-conservative forces.
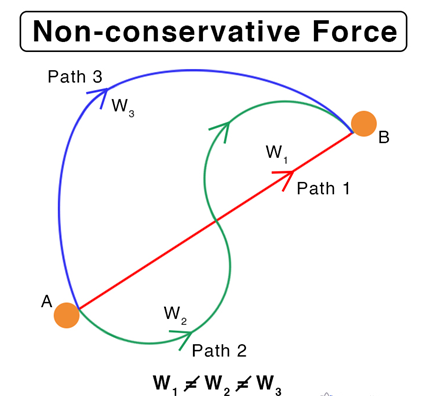
Work done by non conservative force = change in total Energy
Work done by all forces ( conservative+ non conservative)
Various form of Energy
In addition to mechanical energy, there are various other forms of energy.
Chemical Energy: Energy stored in the bonds of chemical compounds. Chemical energy may be released during a chemical reaction, often in the form of heat; such reactions are called exothermic. Reactions that require an input of heat to proceed may store some of that energy as chemical energy in newly formed bonds.
Heat: Heat is the form of energy that is transferred between systems or objects with different temperatures (flowing from the high-temperature system to the low-temperature system). Also referred to as heat energy or thermal energy. Heat is typically measured in Btu, calories, or joules.
Nuclear Energy: Nuclear energy comes from splitting atoms in a reactor to heat water into steam, turn a turbine and generate electricity. Ninety-three nuclear reactors in 28 states generate nearly 20 percent of the nation’s electricity, all without carbon emissions because reactors use uranium, not fossil fuels. These plants are always on: well-operated to avoid interruptions and built to withstand extreme weather, supporting the grid 24/7.
Electrical Energy: Energy is the ability to do work, where work is done when a force moves an object. We need and we use energy every day, and energy is available in all different forms. Electrical energy is energy that's stored in charged particles within an electric field. Electric fields are simply areas surrounding a charged particle. In other words, charged particles create electric fields that exert force on other charged particles within the field. The electric field applies the force to the charged particle, causing it to move - in other words, to do work.
Principle of conservation of Energy
We have discussed that the total mechanical energy of the system is conserved if the force doing work on it is conservative.
If some of the forces are non-conservative then mechanical energy conservation does not hold. Some energy of the system gets converted into some other form like heat, light and sound.
But the total energy of an isolated system does not change, as long as we can account for all forms of energy.
Energy may be transformed from one form to another but the energy of an isolated system remains conserved.
There is no violation of this principle. Since the universe as a whole may be viewed as an isolated system, the total energy of the universe remains the same. If one part of the universe loses energy, another part must gain an equal amount of energy.
Power
We can define power as the rate of doing work, it is the work done in unit time. The SI unit of power is Watt (W) which is joules per second (J/s). Power is a time-based quantity. Which is related to how fast a job is done.
The SI unit of power is Watt (W) which is joules per second (J/s).
- The power of motor vehicles and other machines is given in terms of Horsepower (hp), which is approximately equal to 745.7 watts.
- The commercial unit of energy is 1 kWh. One kilowatt-hour is defined as the amount of energy consumed by a device in one working hour at a constant rate of one kilowatt.
The SI unit of energy is Joule.
- Therefore, the relationship between commercial and SI unit of energy is: 1 kWh = 1kW x 1h = 1000W x 1h = 1000(J/s) x 3600 s = 3.6 x10^6 J
3. Collision
Vertical circle
Let an object of mass ‘m’ move in a circle that lines in the vertical plane. This is not a uniform circular motion as the velocity of the object in the vertical circle is not constant.
Let T1 be the tension in the string at the lowest point of the vertical circle and T2 be the tension in the string at the highest point of the vertical circle
There is a requirement of centripetal force
Let v1 and v2 be the velocities of the object at the lowest and highest points of the vertical circle.
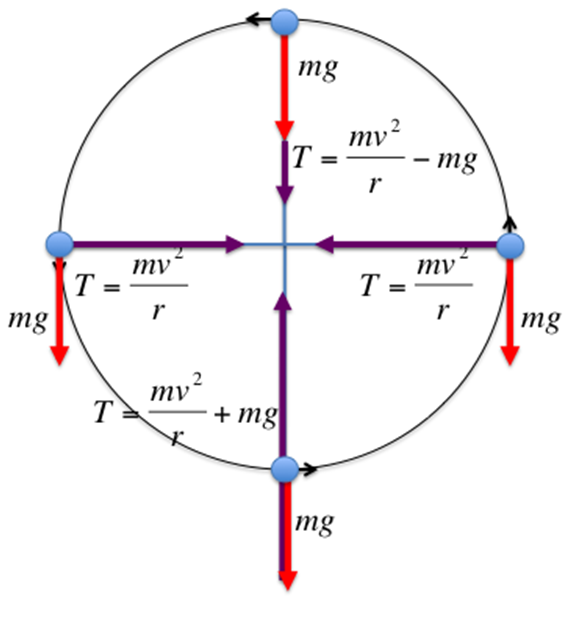
At lowest point
At highest point
- Work done by the Tension force is zero and tension is perpendicular to the displacement direction always.
- We can use the conservation of energy in the case of a vertical circle.
Important results for Vertical circle
- The difference in the tension in the string at the lowest and highest point is 6mg. It is independent of the velocity.
- The difference in the square of the velocities at the lowest and highest points is 4gr.
- The minimum velocity at the highest point is
- The minimum velocity at the lowest point is
Collision
Collision, also called impact, in physics, is the sudden, forceful coming together in direct contact of two bodies, such as, for example, two billiard balls, a golf club and a ball, a hammer and a nail head, two railroad cars when being coupled together, or a falling object and a floor.
- In all of the examples of colliding bodies here referred to, the time of contact is extremely short and the force of contact extremely large.
- there is an instantaneous change in the velocity of a body but no change in its position during the period of contact.
- Forces of this nature are known as impulsive forces and, being difficult to measure or estimate, their effects are measured by the change in the momentum (mass times velocity) of the body.
Two types of collision:
Elastic collision: Collision between two bodies is said to be elastic when there is no energy loss during the collision
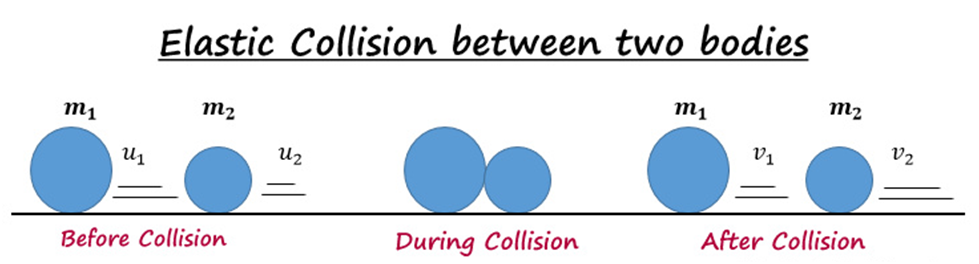
Inelastic collision: Collision between two bodies is said to be inelastic when there is some loss of kinetic energy during the collision. In the case of perfectly inelastic collisions bodies stick together after collision and move with a common velocity.
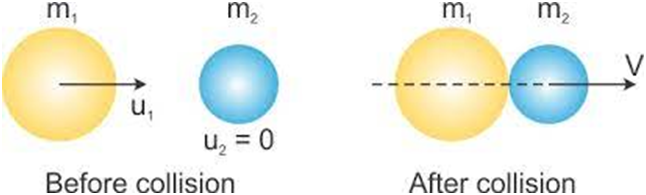
- Conservation of momentum holds for both case elastic collision as well as inelastic collision.
- Conservation of energy holds only in the case of elastic collision.
Coefficient of restitution
For perfectly elastic collision e=1 and for perfectly inelastic collision e=0
Elastic collision in one Dimension.
Consider two bodies of masses m1 and m2 moving with initial velocities u1 and u2 along the same direction. After the collision, their final velocities are v1 and v2 respectively.
Since it is an elastic collision so there will be no energy loss. So we can apply conservation of energy and momentum both
By conservation of momentum we have Pi= Pf
Rearranging we have
By conservation of energy we have K.Ei= K.Ef
Divide equation 2 by 1 we will get
Thus
When we put the value of v1 and v2 separately in the equation of momentum conservation we get the values of final velocities of the object v1 and v2 in terms of their masses m1 and m2 and initial velocities u1 and u2.
Special case 1 : when the target is at rest u2=0
Special case 2: when the masses of the objects are equal and both objects are moving.
When the masses of the objects are the same, the velocities of objects get interchanged after the collision.
Special case 3: when the target is at rest and the masses of both the objects are equal.
When the target is at rest and the masses of objects are the same, the first object becomes stationary and the second object starts moving with the initial velocity of the first object.
Elastic Collision in two dimensions.
Suppose we have two objects, one is at rest and the other is moving with initial velocity v1i, after collision object m1 moves with final velocity v1f making an angle θ with the horizontal direction and mass m2 moves with final velocity v2f making an angle Φ with the horizontal direction.
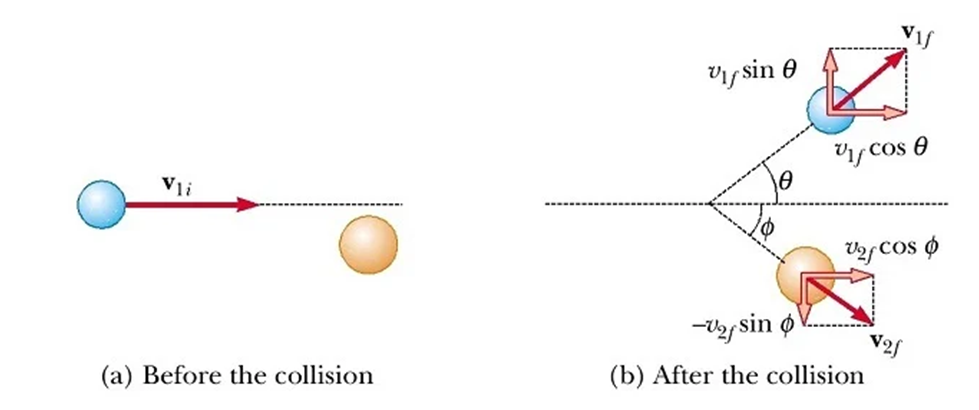
- First, we will resolve the components of v1f and v2f along a horizontal and vertical direction which is the x and y direction respectively.
- Then we will apply conservation of momentum separately along x and y-direction.
Putting the values we get
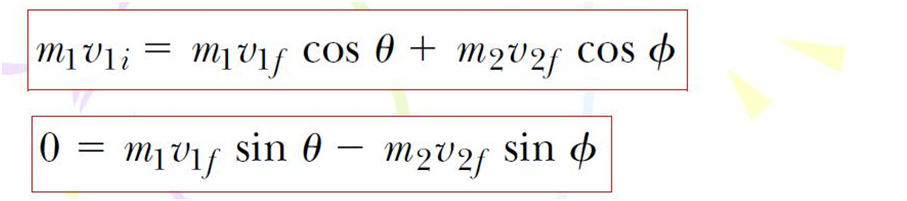
- From the conservation of energy, we have K.E i= K.Ff
Analyzing the above equations reveals that finding values for four unknown quantities v1, v2, θ1, and θ2 using the above three equations is not possible. As a result, it cannot predict the variable because there are four of them. However, if we measure any one variable, we can uniquely determine the other variable using the above equation.
Inelastic collision
Suppose we have two objects of mass m1 and m2 moving with initial speeds v1i and v2i respectively. After collision, they stick together and start moving together with final velocity vf. This is the case of a perfectly inelastic collision.
We cannot use conservation of energy in inelastic collisions. But we can use conservation of momentum to find the final velocity vf
Initial momentum = final momentum
Loss of kinetic energy in case of inelastic collision
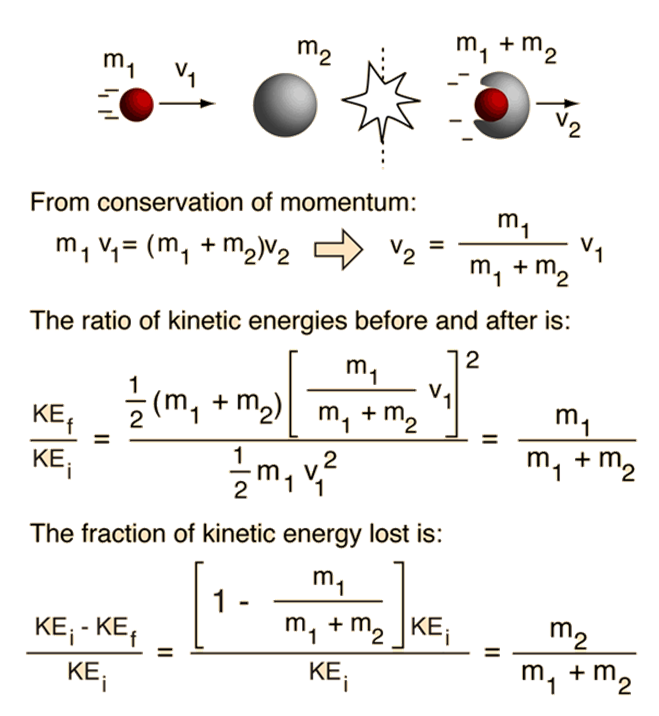
2. rotational motion
Angular velocity and linear velocity
Consider a rigid body rotating with about a fixed axis (the Z axis) which is perpendicular to the plane of the paper. Now consider a point P at a distance ‘r’ from the origin. As the rigid body rotates the particle at point P moves with a constant speed ‘v’ in a circular path as shown by the dotted line. Here ‘v ‘is the linear velocity of the particle at a distance ‘r’ from the origin
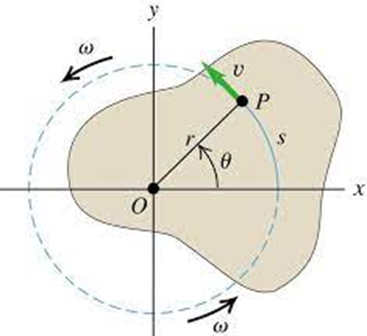
Suppose the particle P moves a linear displacement and angular displacement of ‘
If ‘r’ is the distance of particle P from the origin. Then
So we have the relation between linear and angular velocity
Important results from the relation
- The linear velocity is different at different points on the circle.
- It is zero at the center. It is a minimum in between the center and any point on the circumference.
- It is maximum at the circumference of the circle.
- However, angular velocity remains the same at all points on the circular path.
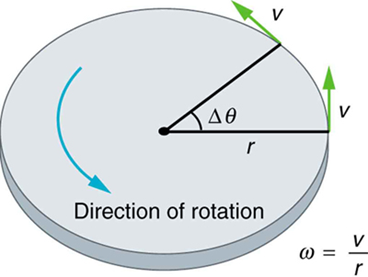
We refer to ω as the angular velocity of the whole body.
We have characterized pure translation of a body by all parts of the body having the same velocity at any instant of time. Similarly, we may characterize pure rotation by all parts of the body having the same angular velocity at any instant of time.
Angular displacement is considered as an axial vector: We know that angular displacement is the angle traced by a particle under circular motion. Since the direction of the displacement is along the axis, that’s why angular displacement is an axial vector.
Similar to the displacement, the angular velocity is also an axial vector quantity. We can find its direction by using the Right-hand Thumb Rule. In general, we have the relation
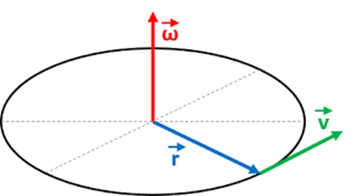
This rule says: Curl your fingers in a counterclockwise direction, and the thumb pointing outwards (along the axis) is the direction of the angular velocity. Similarly, if you curl your fingers in a clockwise direction, then the thumb pointing inwards gives the direction of ω.
Angular acceleration
In rotational motion, the concept of angular acceleration in analogy with linear acceleration is defined as the time rate of change of velocity in translational motion.
Angular acceleration, also called rotational acceleration, is a quantitative expression of the change in angular velocity that a spinning object undergoes per unit of time. It is a vector quantity, consisting of a magnitude component and either of two defined directions or senses.
The vector direction of the acceleration is perpendicular to the plane where the rotation takes place. Increase in angular velocity clockwise, then the angular acceleration velocity points away from the observer. If the increase in angular velocity is counterclockwise, then the vector of angular acceleration points toward the viewer.
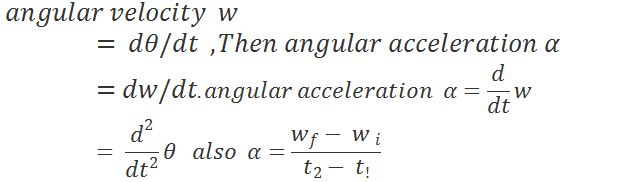
Relation between linear acceleration and angular acceleration
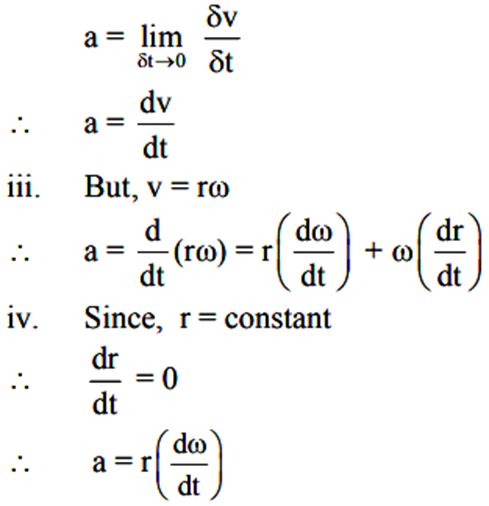
Which finally gives the relation
Moment of force: Torque
We have learned that the motion of a rigid body is a combination of both translational and rotational motion. But if we fix the rigid body by one point or line, it can do only rotational motion.
In translational motion, an external force is required for the translational motion to happen (to produce a linear acceleration in the body). What must be the rotational analog of force? What makes a rigid body rotate?
Take an example of a door. A door is a rigid body that can rotate about a fixed vertical axis passing through the hinges. What makes the door rotate? It is clear that unless a force has been applied the door does not rotate. But alone force cannot do the job.
If we apply the force on the hinge, the door will not rotate. But if we apply force at right angles to the door at its outer edge it is most effective in producing rotation. It is not the force alone, but how and where the force is applied is important in rotational motion.
The rotational analog of force is the Moment of force. The turning effect of a force is known as the moment of force, which is also known as torque.
It is the product of the force multiplied by the perpendicular distance from the line of action of the force to the pivot or point where the object will turn.
The magnitude of Torque
The SI unit of moment of a force is Newton-meter (Nm). It is a vector quantity.
Torque will be minimum when θ = 0, 180 Then
Torque will be maximum when
Since r × F is a vector product, properties of a vector product of two vectors apply to it.
Angular momentum
In translational motion, we have linear momentum which is the product of mass and linear velocity P= mv and we have seen the concept of conservation of linear momentum when a net external force is applied to the system is zero. What could be the rotational analog of linear momentum?
The rotational analog of linear momentum is angular momentum. Just like the moment of force is a vector product of r and F. The angular momentum is also a vector product of r and P (linear momentum)
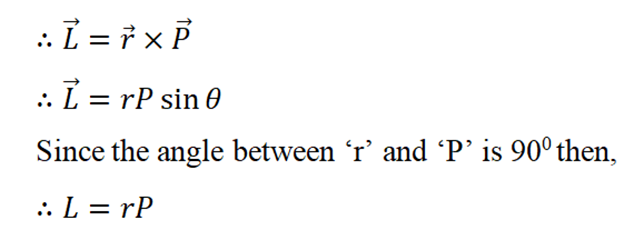
Since angular momentum is the vector product of r and P, it is also a vector quantity and follows all the properties of the vector product.
L would be zero when
How to calculate L as a vector using r and F in vector form?
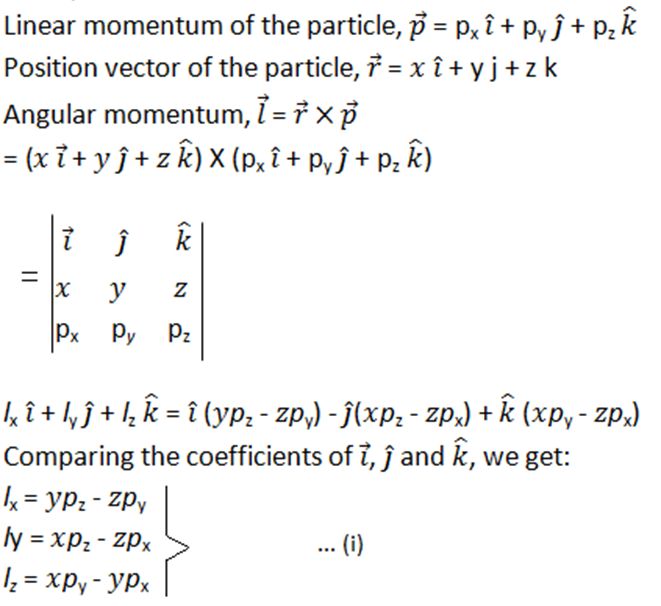
The physical quantities, a moment of force and angular momentum, have an important relationship between them. It is the rotational analog of the relation between force and linear momentum
Let us derive the relation between the moment of force and the angular momentum,
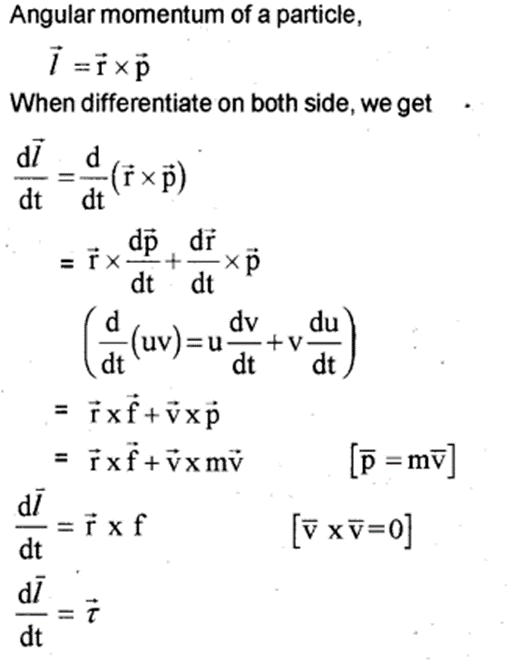
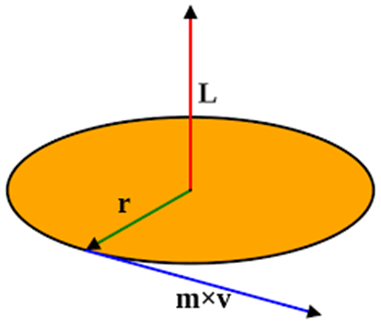
Thus, the time rate of change of the angular momentum of a particle is equal to the torque acting on it. This is the rotational analog of the equation F = dp/dt, which expresses Newton’s second law for the translational motion of a single particle
Moment of force and angular momentum
When no external force is applied on a system of particles, so from Newton’s second law
This relation suggests that when the external force on the system of particles is zero then its linear momentum is conserved.
We have rotational analog of this relation as ![]()
Thus the time rate of the total angular momentum of a system of particles about a point is equal to the sum of the external torques acting on the system of particles taken about the same point.
Conservation of angular momentum
![]()
Or we can say that L= constant.
Thus, if the total external torque acting on a system is zero. Then the total angular momentum of the system is conserved or remains constant. This is called the conservation of angular momentum.
This is the rotational analog of conservation of linear momentum in translational motion.
Equilibrium of rigid body
Equilibrium is a state of the body where neither the internal energy nor the motion of the body changes with respect to time. Let us try to understand the equilibrium of a rigid body.
If we have to define equilibrium the simplest definition would be it is a point where the net external force, as well as torque acting on the body about COM or any other point, is zero. But to be more specific for a rigid body equilibrium means both rotational and translational equilibrium. For example, consider the following situation:
In the mechanical equilibrium of a rigid body, the linear momentum and angular momentum remain unchanged with time. This implies that the body under the influence of external force neither has a linear acceleration nor an angular acceleration. We, therefore, can say that:
- If the total force on a rigid body is zero then the body shows translational equilibrium as the linear momentum remains unchanged despite the change in time.
- If the total torque on a rigid body is zero then the body shows rotational equilibrium as the angular momentum does not change with time.
Mechanical equilibrium when we sum up the above findings of translational and rotational equilibrium we get the following relations.

A body may be in partial equilibrium, i.e., it may be in translational equilibrium and not in rotational equilibrium, or it may be in rotational equilibrium and not in translational equilibrium.
In the figure given below, we have a rod PR and Q is the position of the center of mass of the rod PR such that PQ= QR= a, Two forces F of same magnitude are applied at the two ends of the rod at P and R as shown.
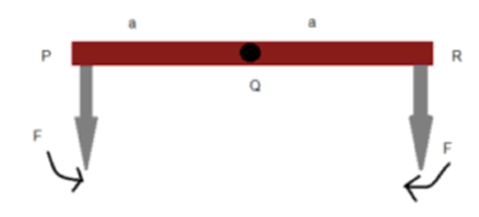
The net torque, in this case, will be zero, as one force is anticlockwise torque and the other in a clockwise direction, so it will be in rotational equilibrium. But since the net Force on the rod is not zero, so it is not in translational equilibrium since
In the next example given below, the direction of force at R is reversed. Now the net force on the rod is zero so it will be in translational equilibrium, But torque due to both are forces are in an anticlockwise direction so net torque is not zero, so there is no rotational equilibrium.
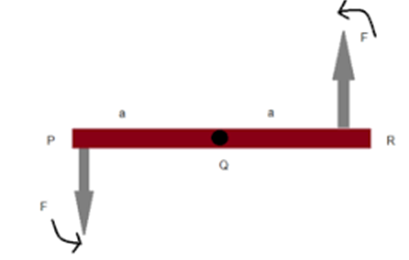
Rigid body rotation and its equations
Like in translational motion we had an equation of motion to describe the dynamics of translation motion of the body. Similarly, we have equations that determine the dynamics of the rotational motion.
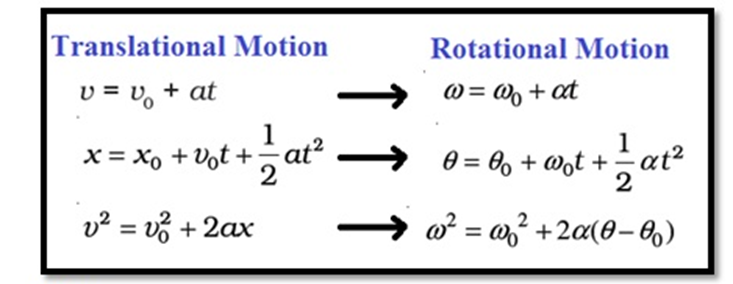
Where
When initial angular displacement
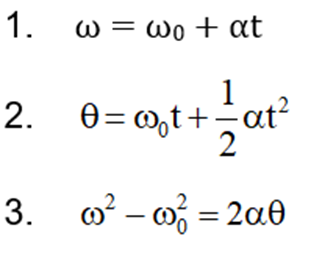
For example:
Question: A wheel starts from rest and rotates 200 radians in 8 seconds.
- What is the angular acceleration of the wheel?
- What is the final angular velocity after 16 seconds?
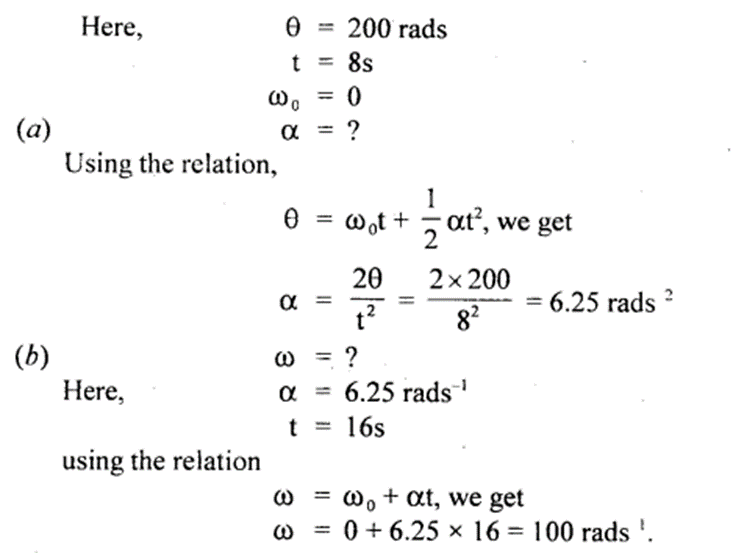
A fun thing to do!
Below is the link of the game
Balancing Act Game: In this game, you need to answer the questions on balancing acts.
- Sometimes you need to balance that by putting masses somewhere
- Sometimes you need to just answer, which side of the balance will come down?
- Sometimes you need to calculate the mass of the unknown by trying to balance it with other objects.
Conceptual understanding required to win the challenge:
- You need to understand the concept or torque and also the formula of torque
- Also, you need to understand that it will balance when the net torque will be zero.
3. Moment of Inertia
Moment of Inertia
The moment of inertia of an object is a calculated measure for a rigid body that is undergoing rotational motion around a fixed axis: that is to say, it measures how difficult it would be to change an object's current rotational speed. That measurement is calculated based upon the distribution of mass within the object and the position of the axis, meaning that the same object can have very different moments of inertia values depending upon the location and orientation of the axis of rotation.
Moment of Inertia in rotational motion is analogous to mass in translational motion.
The moment of inertia of an object rotating around a fixed object is useful in calculating two key quantities in rotational motion:
Rotational kinetic energy: ![]()
Angular Momentum: L = Iω
You may notice that the above equations are extremely similar to the formulas for linear kinetic energy and momentum, with a moment of inertia "I" taking the place of mass "m" and angular velocity "ω" taking the place of velocity "v," which again demonstrates the similarities between the various concepts in rotational motion and in the more traditional linear motion cases.
The International System of Units (SI unit) of the moment of inertia is one kilogram per meter squared (kg-m2).
Calculation of Moment of Inertia
To calculate the moment of inertia in its most general form. It basically consists of the following steps:
- Measure the distance r from any particle in the object to the axis of symmetry.
- Square that distance.
- Multiply that squared distance times the mass of the particle.
- Repeat for every particle in the object.
- Add all of these values up.
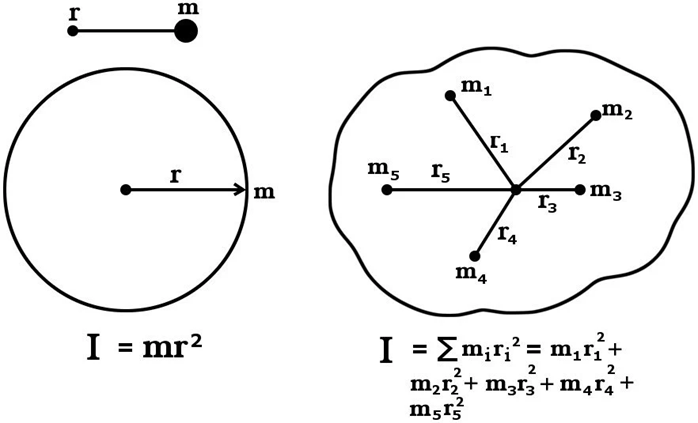
Moment of Inertia is denoted by ‘I’ =
Radius of gyration
The radius of gyration of anybody about the axis of rotation is defined as that radial distance from the axis of rotation, at which the entire mass of that body is concentrated. Thus, the point will have a moment of inertia at this particular point also. It is denoted by k.
This is also referred to as the measure of the way in which the mass of a rotating rigid body can be distributed about its axis of rotation.
If the moment of Inertia is represented by me, then its value is
Let
Then, MOI or the moment of inertia of the body on its rotational axis is calculated as
If the mass of all the particles is the same as m, then the equation can be written as:
Moment of Inertia
It can also be written as
If we multiply and divide the equation by n, then the equation will be,
We have total mass M= m n so,
Therefore we have
So, radius of gyration 
This clearly shows that k is the radius of gyration of a body about an axis is the root of the mean square distance of several different body particles from the rotational axis.
Theorems of perpendicular and parallel axis
There are two useful theorems relating to the moment of Inertia. By applying these theorems it is easier to find out the moment of inertia of some regular-shaped bodies.
Parallel Axis theorem - The Parallel axis theorem states that the moment of inertia of a body (rigid body) about an axis is equal to its moment of inertia about an axis passing through the center of mass of the body parallel to the given axis plus the product of the mass of the body and the square of the perpendicular distance between the two axes parallel to each other.
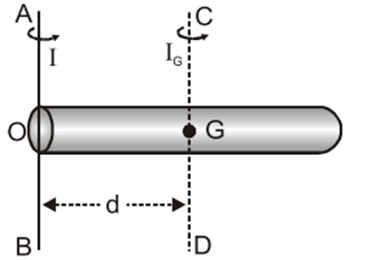
Where I = moment of inertia about axis AB and IG = moment of inertia about the center of the mass CD, M= total mass of rod and, d = distance between axis AB and CD
Perpendicular Axis theorem
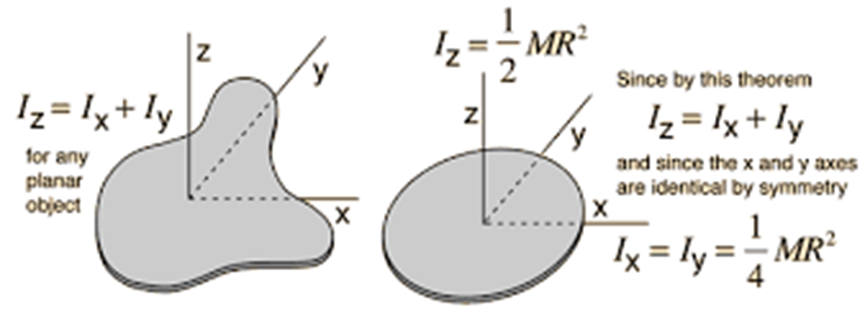
Moment of Inertia of various geometric shapes about the different axis of rotation
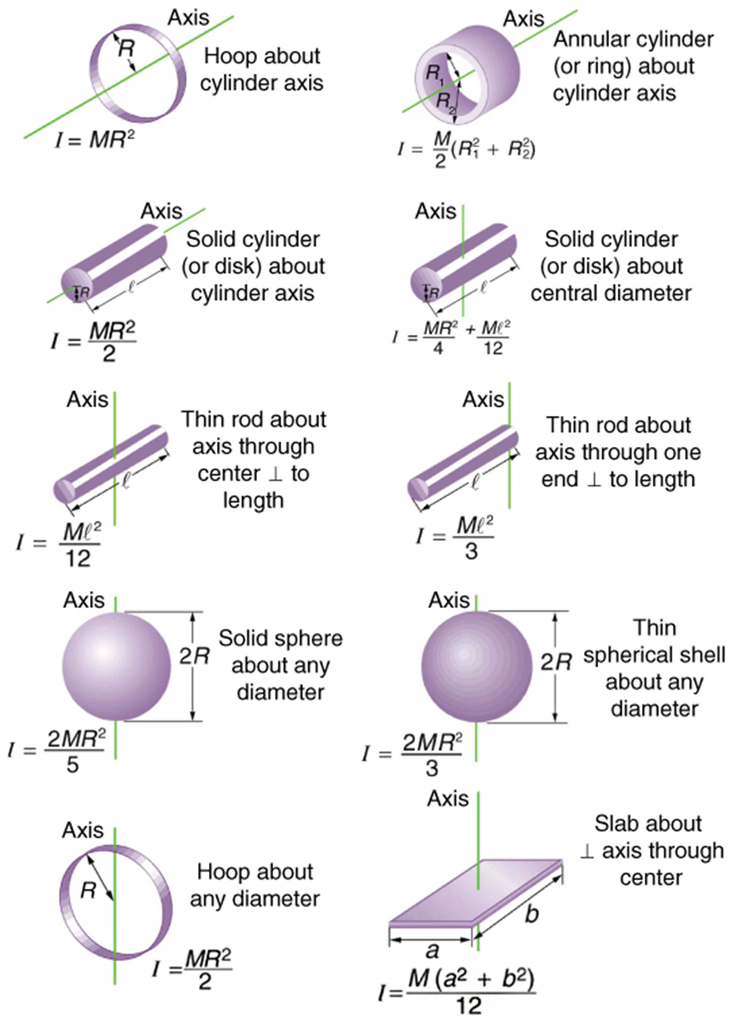
Comparison between translational and rotational motion
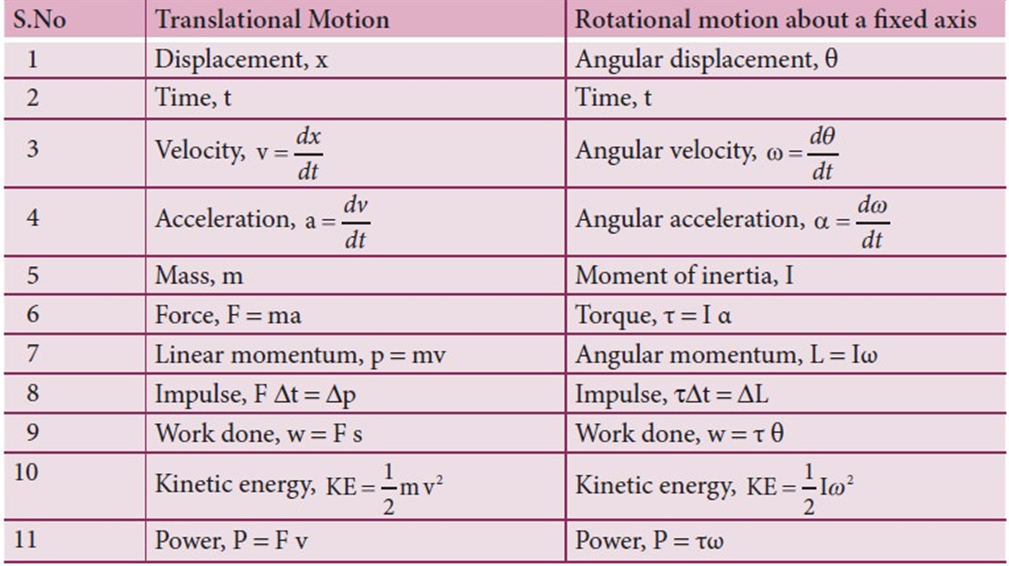
2. gravitational Potentials and energy.
Gravitational potential Energy near the surface of the earth
We have already discussed the notion of potential energy as being the energy stored in the body due to its position and configuration. We attach the concept of potential with only conservative forces like electrostatic, gravitational force etc.
If we change the position or configuration of the system its potential energy would change. An external force has to do some work on the system to change the position of the configuration of the system. Actually, this external work done by the external force gets converted into the potential energy of the system.
The force of gravity is a conservative force and we can calculate the potential energy of the body arising due to this force, called gravitational potential energy.
Potential energy of the object of mass ‘m’ at height ‘h’ near the earth's surface is given by
Where P.E (0) is the potential energy of the object at the surface of the earth which is a constant.
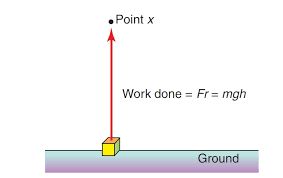
If we are only interested in knowing the change in potential of the object when we lift the object from the surface to height ‘h’ then we actually drop the constant term and simply write
Suppose we have an object of mass ‘m’ kept at height ‘h1’ from the surface of the earth. If we try to lift that object to a height ‘h2’ from the surface of the earth, we need to do some work against gravity.
Work done in lifting the particle of mass m from the first to the second position is denoted by W12.
The work done in moving the particle is just the difference of potential energy between its final and initial positions (change in potential energy)
Gravitational potential energy at an arbitrary distance
If we wish for the gravitational potential energy at an arbitrary distance from the surface of the earth (not near the earth), then we cannot use the above-discussed formula P.E= mgh, as this is not valid here since the assumption that the gravitational force mg is a constant is no longer valid.
However, from our discussion, we know that at a point outside the earth, the force of gravitation on a particle directed towards the center of the earth is ![]()
Where r is the distance of the object from the center of the earth.
Me= mass of earth and m= mass of the object.
If we wish to move the object from a distance r1 to a distance r2 from the center, an external force has to do some work against the force of gravitation
The negative sign indicated a bound state.
When we take an object of mass m from infinity (r1) into the gravitational field of massive object M at a distance ‘r’ (r2) from the center of the object of mass M.
When the work is done in doing this will be,
This work is stored in the form of the potential energy of the system.
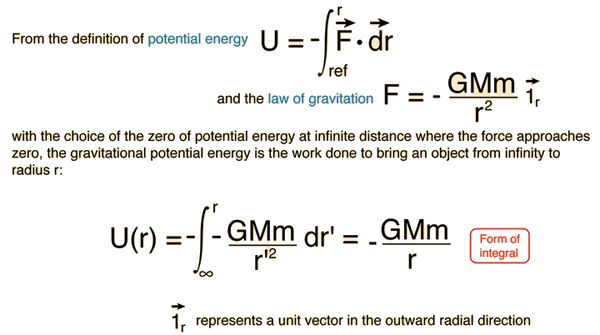
Gravitational Potential energy due to a system of masses
When we wish to calculate the potential energy of a system of masses, for example, three masses at the corner of an equilateral triangle etc. We need to find the work done by the external force in assembling the system of mass. As the work done by the external force in assembling the masses at their respective positions. For example
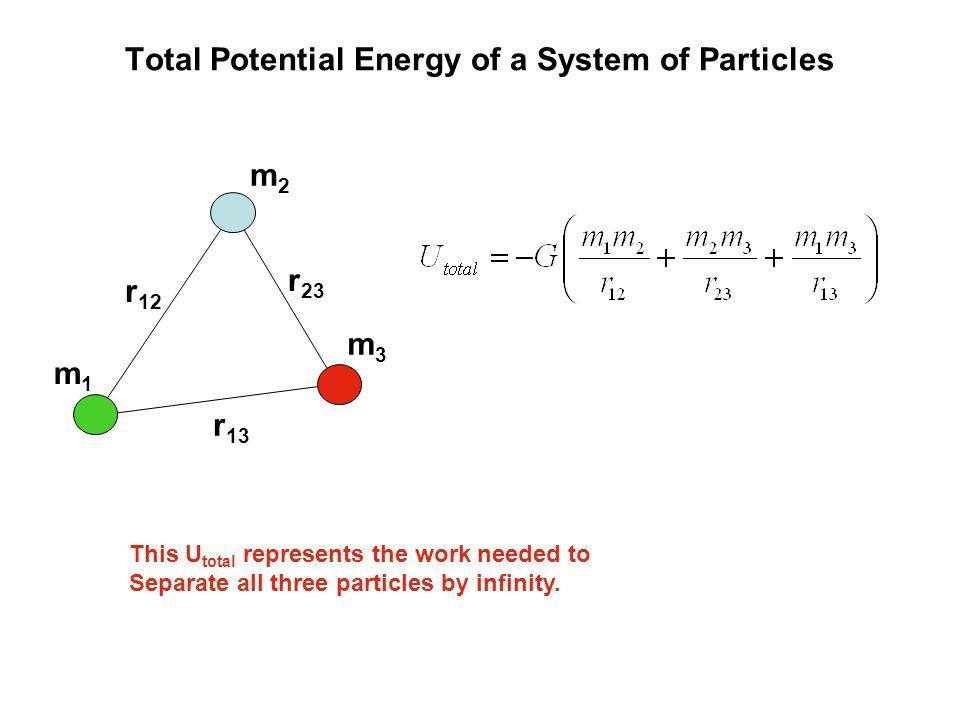
Escape velocity

All of us have experienced that when we throw anything from earth, it eventually falls back on earth. Greater the speed of throw would be, the higher the object can go and then return back to earth. This happens because the gravitational pull of the earth pulls the object back on earth.
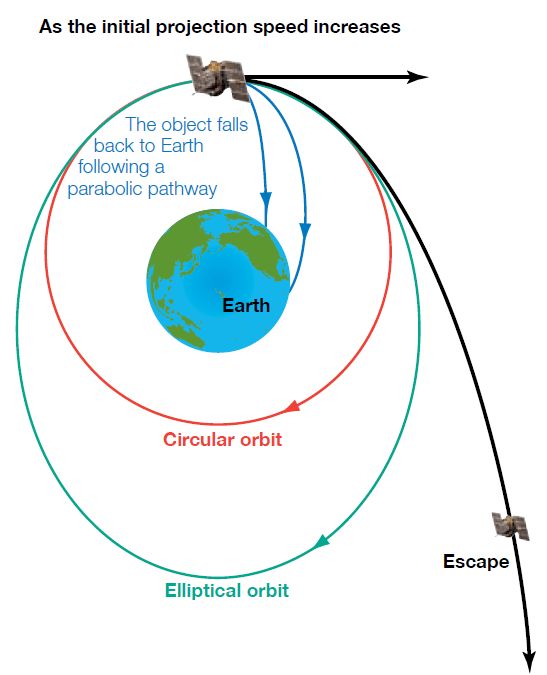
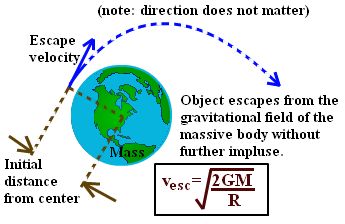
Now the question is with what speed the object should be thrown so it would never come back to earth again and just escape the earth's gravitational field. That velocity would be the escape velocity of the earth.
While calculating the escape velocity, we make use of the concept of mechanical energy conservation.
Let the initial mechanical energy of the rocket at the surface of the earth would be
![]() ... 1
... 1
We assume that when the object just escapes the gravitational field of the earth its final gravitational potential energy would be zero. And to calculate the minimum escape velocity we assume that the object just stops after escaping the gravitational field of the earth so its final kinetic energy would also be zero.
According to the principle of conservation of mechanical energy
So, ![]()
Therefore we have escape velocity ![]()
![]() from the surface of the earth. The numerical value of the escape velocity from the surface of the earth =11.2 km/hr.
from the surface of the earth. The numerical value of the escape velocity from the surface of the earth =11.2 km/hr.
If we want to calculate escape velocity from the surface of the moon then M would be the mass of the moon and R= radius of the moon.
Since the gravitational pull of the moon is very less compared to the gravitational pull of the earth, escape velocity from the surface of the moon is about five times smaller than the escape velocity from the surface of the earth. Acceleration due to gravity on moon ![]()
So escape velocity at surface of moon = ![]() = 2.3 km/s
= 2.3 km/s
The smaller value of escape velocity is the reason that the moon has no atmosphere. Gas molecules if formed on the surface of the moon having velocities larger than this will escape the gravitational pull of the moon.
In general for any planet of radius ‘r’ and mass ‘M’ we have the value of escape velocity.
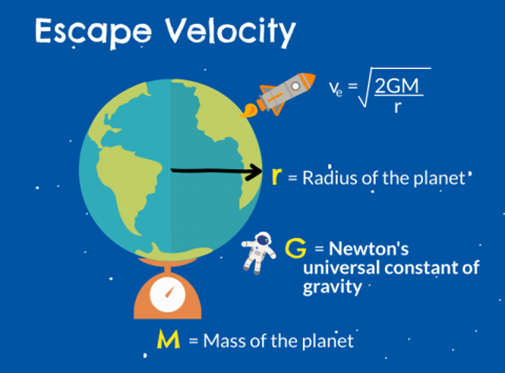
If the object was to be thrown out of the gravitational pull of the earth from a height ‘h’ above the surface of the earth, then the initial distance of the object from the center of the planet will be r= R+h for this case. Therefore escape velocity would be ![]() from a height ‘h’ from the surface of the earth.
from a height ‘h’ from the surface of the earth.
You will notice that as the distance from the center increases, escape velocity decreases.
Orbital velocity
Earth is surrounded by various satellites hovering miles above our heads. Our own moon also remains above the planet at all hours. But why don’t these objects come crashing down onto the planet’s surface? After all, other items in the sky, like an airplane or a hot air balloon, will eventually crash down if they run out of power. The reason that man-made satellites and the moon do not come crashing down is because they have achieved orbital velocity.
Did you know that space missions like GPS satellites, geosynchronous satellites, etc. are possible only because of the correct calculations of the orbital velocity?
The word "orbit" is defined as the path a body follows when being acted upon by the force of gravity. For example, a communications satellite follows an orbital path around the Earth and the Earth follows an orbital path around the Sun.
Orbital velocity, a velocity sufficient to cause a natural or artificial satellite to remain in orbit. The inertia of the moving body tends to make it move on in a straight line, while gravitational force tends to pull it down. The orbital path, elliptical or circular, thus represents a balance between gravity and inertia.
For a satellite of mass m to move around a planet of mass M around a circular path at a distance ‘r’ from the center of the planet with a constant speed ‘v’, there is a requirement of centripetal force. This centripetal force is provided by the gravitational pull of the planet on the satellite.
So we have ![]()
So we have an orbital velocity ![]()
![]()
If the satellite is at altitude ‘h’ above the earth’s surface then r= R+h
So ![]() )
)
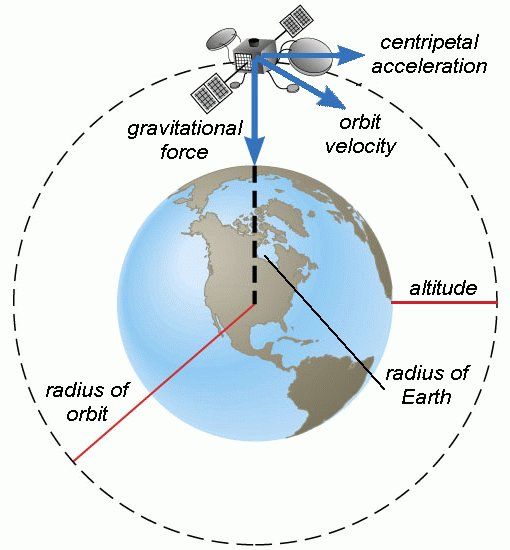
It is clear that orbital velocity is inversely proportional to the square root of the radius of the orbit. As we go far from the planet, orbital velocity decreases.
The time period of revolution of the satellite in orbital radius at height ‘h’ above the earth's surface is given by![]()
For a satellite very close to the surface of earth h can be neglected in comparison to R, so we can approximate ![]() =
=![]()
After putting the value of ![]() and
and
Numerical value of the Time period of a satellite near the surface of the earth is equal to 85 minutes.
Energy of the orbiting satellite.
The total energy of the orbiting satellite of mass ‘m’ would be the sum of kinetic energy and potential energy of the satellite.
The kinetic energy of the satellite in the orbit would be = ![]() , where vo be the orbital velocity of the satellite in that orbit.
, where vo be the orbital velocity of the satellite in that orbit.
![]() …1
…1
The potential energy of the satellite in an orbit at a height ‘h’ above the surface of the earth would be given as,
If we add P.E. and K.E. we will get the total energy of the orbiting satellite
![]()
Points to be noted:
- The Total energy of the orbiting satellite is negative which tells us that the satellite is in a bound state with the planet.
- The total energy of an orbiting satellite is half the value of its potential energy.
![]()
- The absolute value of the total energy of the orbiting satellite is equal to its kinetic energy.
Geostationary Satellite and polar satellites
Geostationary satellites
As the name suggests geostationary, is a satellite that appears to be located at a fixed point in space when viewed from the earth’s surface. This is possible when the time period of the satellite in the orbit matches the rotation time of the earth about its own axis which is 24 hours.
![]() = 24 hours if we put the value of G, M and R and try to calculate altitude h, you will get something close to 36000 km.
= 24 hours if we put the value of G, M and R and try to calculate altitude h, you will get something close to 36000 km.
A geostationary satellite is in an orbit that can only be achieved at an altitude of 35,786 km (22,236 miles) precisely and which keeps the satellite fixed over one longitude at the equator.
It is known that electromagnetic waves above a certain frequency are not reflected from the ionosphere. Waves used in television broadcasts or other forms of communication have much higher frequencies than critical frequency and thus cannot be received beyond the line of sight. A Geostationary satellite, appearing fixed above the broadcasting station can however receive these signals and broadcast them back to a wide area on earth. The INSAT group of satellites sent up by India are one such group of geostationary satellites widely used for telecommunications in India.
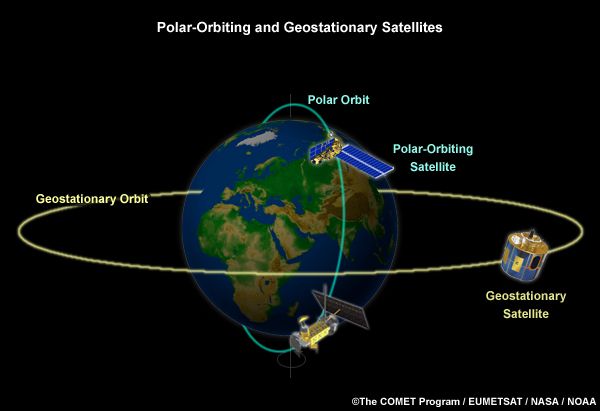
Advantages of Geostationary satellites
- A single geostationary satellite is on a line of sight with about 40 percent of the earth's surface. Three such satellites, each separated by 120 degrees of longitude, can provide coverage of the entire planet
- The geostationary orbit has the advantage that the satellite remains in the same position throughout the day, and antennas can be directed towards the satellite and remain on track.
- The geostationary orbit is used by many applications including direct broadcast as well as communications or relay systems.
- Satellites are always in the same positions relative to earth so antennas do not need re-orientation.
Disadvantages of geostationary satellites.
- Satellites are more costly to install in geostationary orbits in view of its greater altitude.
- Geostationary satellite's orbits can only be above the equator and therefore the Polar Regions cannot be covered.
- Long path length introduces delays and also some losses in the signal.
- The signal travel delay is about 120ms in one direction. The distance of 35786 Km gives 120 ms latency with 3x108 m/sec speed of the signal. Hence it is not suitable for point-to-point applications requiring time-critical applications such as real-time voice, video etc.
Polar satellites
Polar Satellite - A polar orbit is one in which a satellite passes above or nearly above both poles of the body being orbited on each revolution. It, therefore, has an inclination of (or very close to) 90 degrees to the equator.
Polar satellites are also known as sun-synchronous satellites orbits adobe the earth at about 700-1700 km and its orbital period is about 100 minutes.
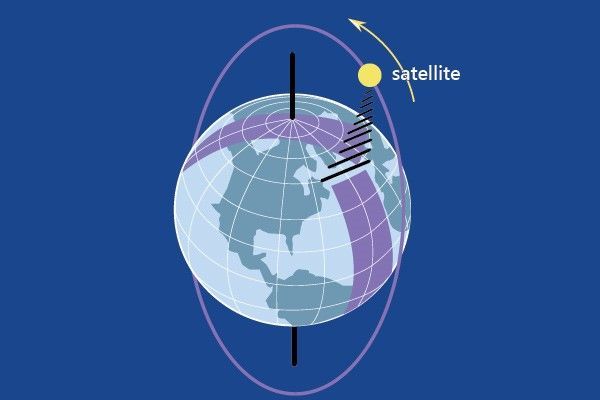
Advantages of polar satellite
- Polar orbits are often used for earth-mapping, earth observation, capturing the earth as time passes from one point, reconnaissance satellites, as well as for some weather satellites.
- Since the orbit is lower for the geostationary satellites, the data resolution is higher and losses and delays are minimal.
- They provide global coverage of climate studies.
Disadvantages of solar orbits
Cannot provide continuous viewing of one location and it is not geostationary.
Weightlessness
Weightlessness is a term used to describe the sensation of a complete or near-complete absence of weight. Astronauts orbiting the Earth often experience the sensation of weightlessness. These sensations experienced by the orbiting astronauts are the same sensations experienced by anyone who has been temporarily suspended above the seat on an amusement park ride. The causes of the sensation of weightlessness in both these cases are the same.
Weightlessness is a sensation experienced by an individual where there are no external objects touching one’s body. In other words, the sensation of weightlessness exists when all contact forces are removed. These sensations are common to the state of free fall.
During free fall, the only force acting on the body is the force of gravity. As gravity is a non-contact force, it cannot be felt without any opposing force. This is the reason why you feel weightless when in a state of free fall.
In a satellite around the earth, every part of the satellite has an acceleration towards the center of the earth which is exactly the value of the earth’s acceleration due to gravity at that position. Thus in the satellite, everything inside it is in a state of free fall. This is just as if we were falling towards the earth from a height. Thus, in a manned satellite, people inside experience no gravity. Gravity for us defines the vertical direction and thus for them, there are no horizontal or vertical directions, all directions are the same. Pictures of astronauts floating in a satellite show this fact.

A fun thing to do: Virtual lab
Below is the link of the simulation of gravity and orbits
In this simulation, we can see the orbit of a celestial body around another massive celestial body (Sun, earth, moon and artificial satellite here)
What can we do following things in this simulation?
- We can choose our system between the given options ( Sun, earth, moon), ( Sun, earth), ( Earth, moon), ( Earth and artificial satellite)
- We can change the masses of the body of the chosen system.
- We can switch on or off the gravity and see how the object will move.
- We can select options like grid, Force vector, velocity vector etc.,
- We can also zoom in and out of the screen.
What will we observe in this simulation?
- After selecting the system and enabling the option like force vector, velocity we can see the direction of force and velocity of the body.
- After clicking on the Play button, the lesser massive body will orbit around the massive body and we can see the path traced by the body.
- When the body is moving, we can see how the direction of velocity is changing.
- Also, we can see the time taken by the body to move one complete revolution.
