 Madhava Publications
Madhava Publications
Angular velocity and linear velocity
Consider a rigid body rotating with about a fixed axis (the Z axis) which is perpendicular to the plane of the paper. Now consider a point P at a distance ‘r’ from the origin. As the rigid body rotates the particle at point P moves with a constant speed ‘v’ in a circular path as shown by the dotted line. Here ‘v ‘is the linear velocity of the particle at a distance ‘r’ from the origin
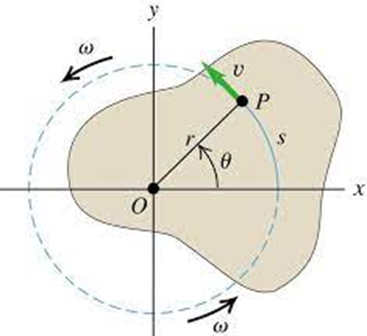
Suppose the particle P moves a linear displacement and angular displacement of ‘
If ‘r’ is the distance of particle P from the origin. Then
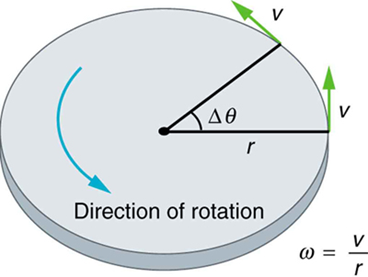
So we have the relation between linear and angular velocity
Important results from the relation
- The linear velocity is different at different points on the circle.
- It is zero at the center. It is a minimum in between the center and any point on the circumference.
- It is maximum at the circumference of the circle.
- However, angular velocity remains the same at all points on the circular path.
We refer to ω as the angular velocity of the whole body.
We have characterized pure translation of a body by all parts of the body having the same velocity at any instant of time. Similarly, we may characterize pure rotation by all parts of the body having the same angular velocity at any instant of time.
Angular displacement is considered as an axial vector: We know that angular displacement is the angle traced by a particle under circular motion. Since the direction of the displacement is along the axis, that’s why angular displacement is an axial vector.
Similar to the displacement, the angular velocity is also an axial vector quantity. We can find its direction by using the Right-hand Thumb Rule. In general, we have the relation
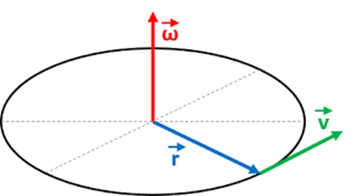
This rule says: Curl your fingers in a counterclockwise direction, and the thumb pointing outwards (along the axis) is the direction of the angular velocity. Similarly, if you curl your fingers in a clockwise direction, then the thumb pointing inwards gives the direction of ω.
Angular acceleration
In rotational motion, the concept of angular acceleration in analogy with linear acceleration is defined as the time rate of change of velocity in translational motion.
Angular acceleration, also called rotational acceleration, is a quantitative expression of the change in angular velocity that a spinning object undergoes per unit of time. It is a vector quantity, consisting of a magnitude component and either of two defined directions or senses.
The vector direction of the acceleration is perpendicular to the plane where the rotation takes place. Increase in angular velocity clockwise, then the angular acceleration velocity points away from the observer. If the increase in angular velocity is counterclockwise, then the vector of angular acceleration points toward the viewer.
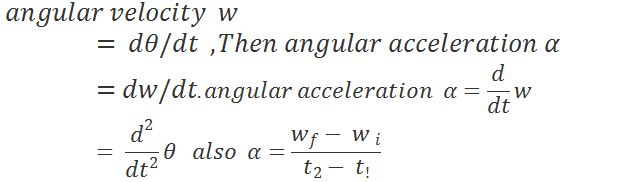
Relation between linear acceleration and angular acceleration
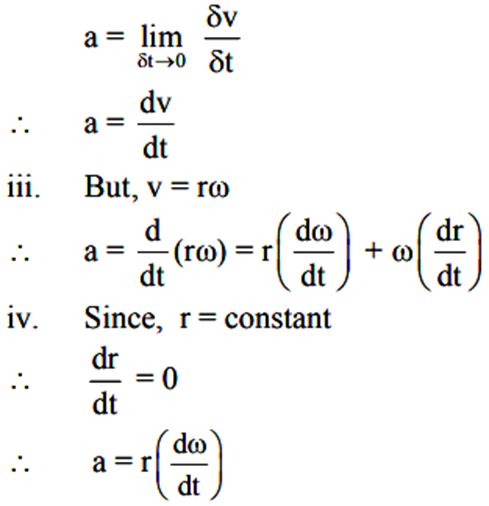
Which finally gives the relation
Moment of force: Torque
We have learned that the motion of a rigid body is a combination of both translational and rotational motion. But if we fix the rigid body by one point or line, it can do only rotational motion.
In translational motion, an external force is required for the translational motion to happen (to produce a linear acceleration in the body). What must be the rotational analog of force? What makes a rigid body rotate?
Take an example of a door. A door is a rigid body that can rotate about a fixed vertical axis passing through the hinges. What makes the door rotate? It is clear that unless a force has been applied the door does not rotate. But alone force cannot do the job.
If we apply the force on the hinge, the door will not rotate. But if we apply force at right angles to the door at its outer edge it is most effective in producing rotation. It is not the force alone, but how and where the force is applied is important in rotational motion.
The rotational analog of force is the Moment of force. The turning effect of a force is known as the moment of force, which is also known as torque.
It is the product of the force multiplied by the perpendicular distance from the line of action of the force to the pivot or point where the object will turn.
The magnitude of Torque
The SI unit of moment of a force is Newton-meter (Nm). It is a vector quantity.
Torque will be minimum when θ = 0, 180 Then
Torque will be maximum when
Since r × F is a vector product, properties of a vector product of two vectors apply to it.
Angular momentum
In translational motion, we have linear momentum which is the product of mass and linear velocity P= mv and we have seen the concept of conservation of linear momentum when a net external force is applied to the system is zero. What could be the rotational analog of linear momentum?
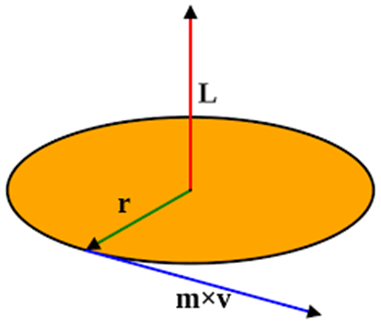
The rotational analog of linear momentum is angular momentum. Just like the moment of force is a vector product of r and F. The angular momentum is also a vector product of r and P (linear momentum)
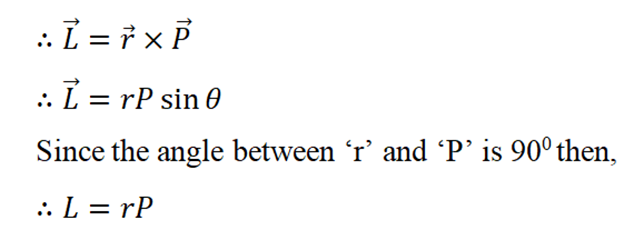
Since angular momentum is the vector product of r and P, it is also a vector quantity and follows all the properties of the vector product.
L would be zero when
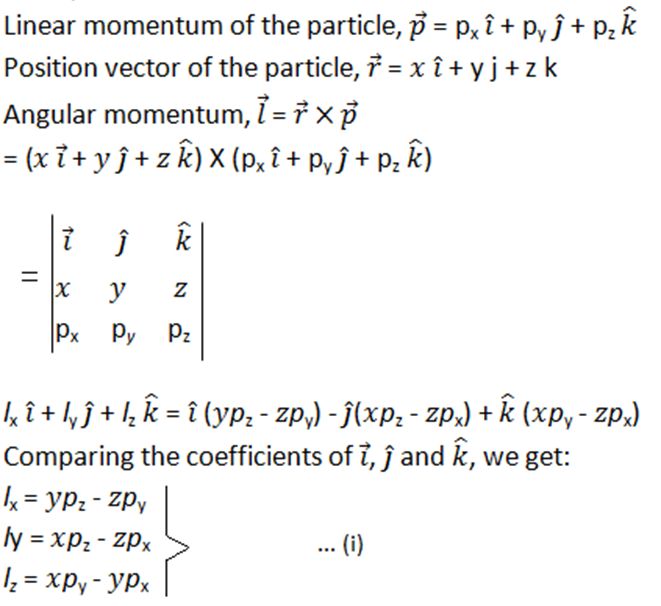
How to calculate L as a vector using r and F in vector form?
The physical quantities, a moment of force and angular momentum, have an important relationship between them. It is the rotational analog of the relation between force and linear momentum
Let us derive the relation between the moment of force and the angular momentum,
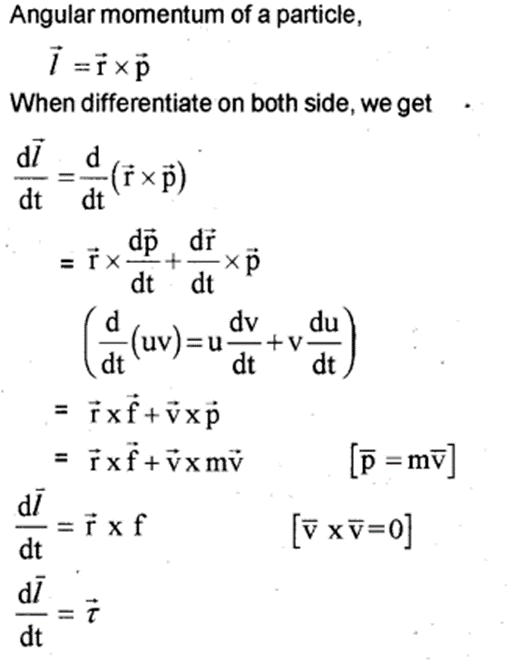
Thus, the time rate of change of the angular momentum of a particle is equal to the torque acting on it. This is the rotational analog of the equation F = dp/dt, which expresses Newton’s second law for the translational motion of a single particle
Moment of force and angular momentum
When no external force is applied on a system of particles, so from Newton’s second law
This relation suggests that when the external force on the system of particles is zero then its linear momentum is conserved.
We have rotational analog of this relation as ![]()
Thus the time rate of the total angular momentum of a system of particles about a point is equal to the sum of the external torques acting on the system of particles taken about the same point.
Conservation of angular momentum
![]()
Or we can say that L= constant.
Thus, if the total external torque acting on a system is zero. Then the total angular momentum of the system is conserved or remains constant. This is called the conservation of angular momentum.
This is the rotational analog of conservation of linear momentum in translational motion.
Equilibrium of rigid body
Equilibrium is a state of the body where neither the internal energy nor the motion of the body changes with respect to time. Let us try to understand the equilibrium of a rigid body.
If we have to define equilibrium the simplest definition would be it is a point where the net external force, as well as torque acting on the body about COM or any other point, is zero. But to be more specific for a rigid body equilibrium means both rotational and translational equilibrium. For example, consider the following situation:
In the mechanical equilibrium of a rigid body, the linear momentum and angular momentum remain unchanged with time. This implies that the body under the influence of external force neither has a linear acceleration nor an angular acceleration. We, therefore, can say that:
- If the total force on a rigid body is zero then the body shows translational equilibrium as the linear momentum remains unchanged despite the change in time.
- If the total torque on a rigid body is zero then the body shows rotational equilibrium as the angular momentum does not change with time.
Mechanical equilibrium when we sum up the above findings of translational and rotational equilibrium we get the following relations.

A body may be in partial equilibrium, i.e., it may be in translational equilibrium and not in rotational equilibrium, or it may be in rotational equilibrium and not in translational equilibrium.
In the figure given below, we have a rod PR and Q is the position of the center of mass of the rod PR such that PQ= QR= a, Two forces F of same magnitude are applied at the two ends of the rod at P and R as shown.
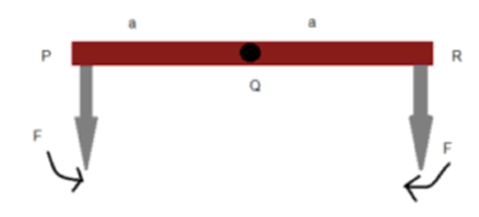
The net torque, in this case, will be zero, as one force is anticlockwise torque and the other in a clockwise direction, so it will be in rotational equilibrium. But since the net Force on the rod is not zero, so it is not in translational equilibrium since
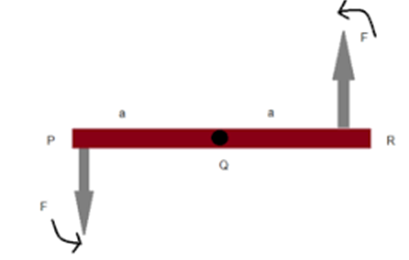
In the next example given below, the direction of force at R is reversed. Now the net force on the rod is zero so it will be in translational equilibrium, But torque due to both are forces are in an anticlockwise direction so net torque is not zero, so there is no rotational equilibrium.
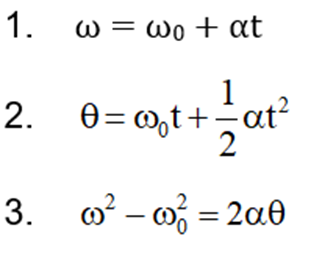
Rigid body rotation and its equations
Like in translational motion we had an equation of motion to describe the dynamics of translation motion of the body. Similarly, we have equations that determine the dynamics of the rotational motion.
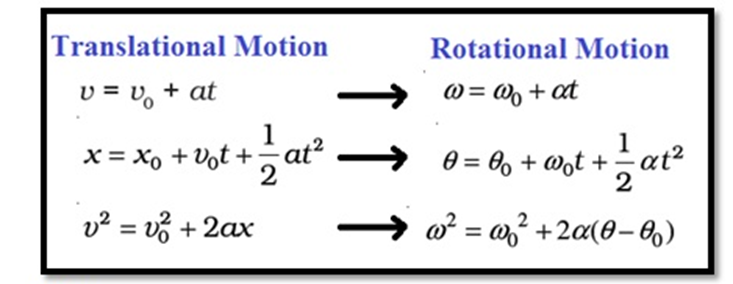
Where
When initial angular displacement
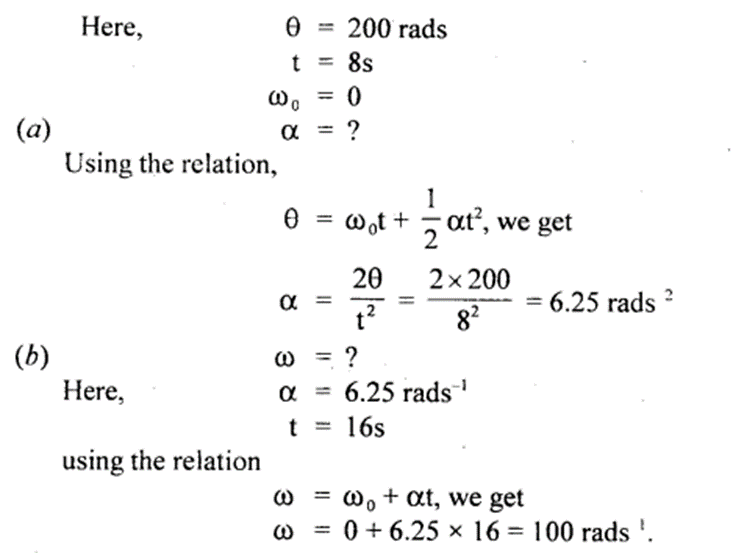
For example:
Question: A wheel starts from rest and rotates 200 radians in 8 seconds.
- What is the angular acceleration of the wheel?
- What is the final angular velocity after 16 seconds?
A fun thing to do!
Below is the link of the game
Balancing Act Game: In this game, you need to answer the questions on balancing acts.
- Sometimes you need to balance that by putting masses somewhere
- Sometimes you need to just answer, which side of the balance will come down?
- Sometimes you need to calculate the mass of the unknown by trying to balance it with other objects.
Conceptual understanding required to win the challenge:
- You need to understand the concept or torque and also the formula of torque
- Also, you need to understand that it will balance when the net torque will be zero.
