 Madhava Publications
Madhava Publications
1. Center of mass
Introduction
In the mechanics we have studied so far, we have assumed the object to be a point mass object, we actually neglected the finite size of the objects. For example, when we talked about the motion of a car on a road, we actually neglected the finite size of the car and actually treated it like a point mass which is certainly not true.
Almost everything which we encounter in our daily life is of finite size and in dealing with the motion of an extended body (of finite size) the idealized concept ( taking it as a point size ) is inadequate.
We must try to understand the motion of the extended body as a system of particles. We shall begin with the consideration of the motion of the system as a whole. The center of mass of a system of particles will be a key concept here.
A wide variety of problems on extended bodies can be solved by taking it as a rigid body. Ideally, a rigid body is a body with a perfectly definite and unchanging shape. The distances between all pairs of particles of such a body do not change.
Although this assumption is not always true, in many cases the deformation produced after the application of the force on a rigid body is so small that it can be neglected.
What are the kinds of Motions a rigid body can have?
We can have three types of motion in a rigid body.
- Purely translational motion.
- Translational + rotational motion.
- Purely rotational motion.
Purely translational motion
In pure translational motion at any instant of time, all particles of the body have the same velocity.
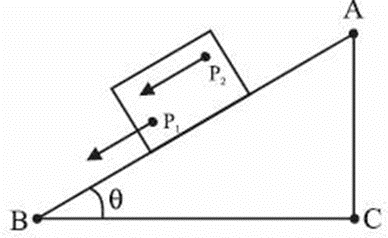
Consider a rectangular block sliding on an inclined plane. We suppose that this block is made up of a system of particles. Suppose we pinpoint two particles P1 and P2 here. We will see that in the case of translational motion, both the particles move with the same speed in the same direction which means they have identical velocities.
Pure rotational motion
Pure Rotational motion is the type of motion about a fixed axis. All the particles constituting it undergoes circular motion about a common axis, then that type of motion is rotational motion.
The line or fixed axis about which the body is rotating is its axis of rotation A rotating body is said to be in the pure rotation if all the points at the same radius from the Center of rotation will have the same velocity.
Rotational plus translational motion- Rolling motion
The rolling motion is a combination of translational motion and rotational motion. For a body, the motion of the center of mass is the translational motion of the body. During the rolling motion of a body, the surfaces in contact get deformed a little temporarily.
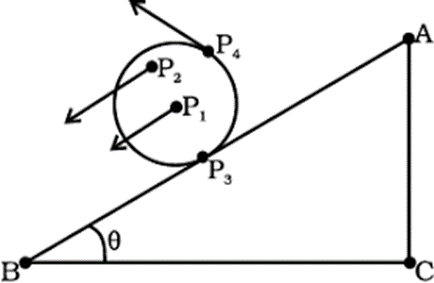
During rolling motion, all the particles have different velocities. Like P1, P2, P3, and P4 in the above example of a ball rolling down the inclined plane has different velocities.
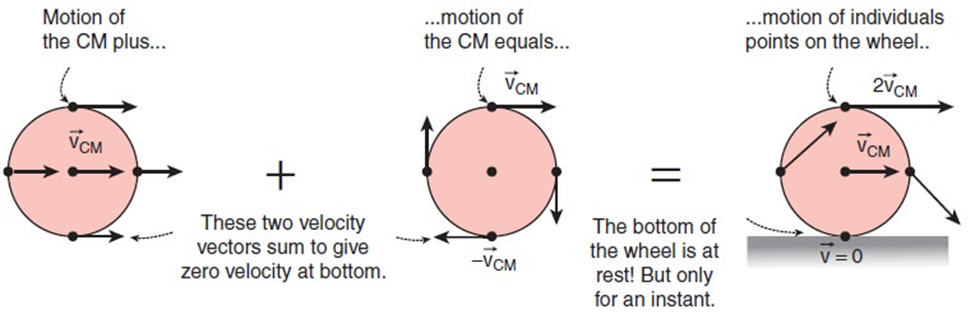
Rolling of the wheel is an example of rolling motion. In pure rolling motion (rolling without slipping), the point of contact is at rest.
Out of these three types of motion of the rigid body, we will discuss the rotational motion of the rigid body in detail in this chapter.
Rotational motion of the rigid body
The rotational motion of a rigid body can be of two types.
- Rotation about a fixed axis of rotation :
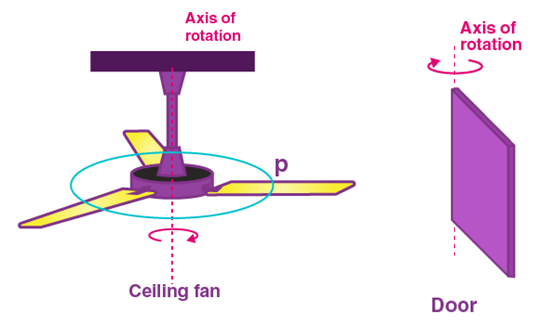
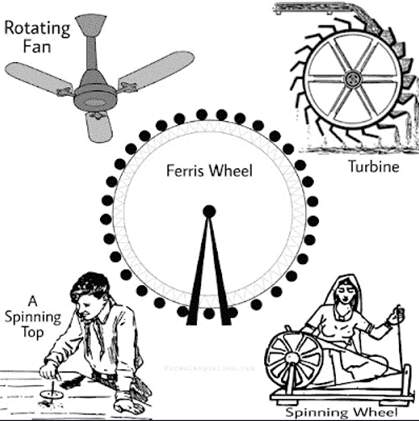
In rotation of a rigid body about a fixed axis, every particle of the body moves in a circle, which lies in a plane perpendicular to the axis and has its center on the axis. For example, rotating fan, merry-go-round, potter's wheel, etc.
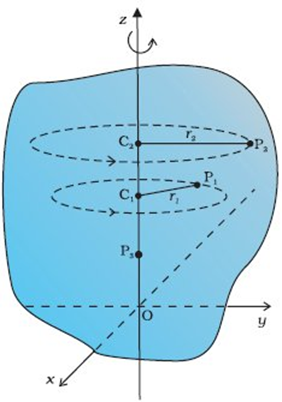
In the figure given above on the right, there is a rigid body that is rotating anticlockwise about the Z axis as shown. The solid line shows the axis of rotations.
We take two particles P1, and P2 at distances r1 and r2 respectively from the axis of rotations. Circles C1 and C2 give the path of the particle followed while rotating. These circles C1 and C2 lie in a plane perpendicular to the axis of rotation.
Another particle P3 is taken at the axis of rotation so here r=0, this point will remain at rest when the whole of the rigid body would be rotating. For any particle on the axis like P3, r = 0. Any such particle remains stationary while the body rotates. This is expected since the axis of rotation is fixed.
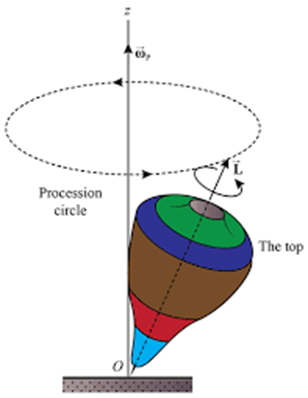
- Precessional motion: Rotation about an axis in the rotation (rotating axis )
In some examples of rotation, however, the axis may not be fixed. A prominent example of this kind of rotation is a top spinning in place. We know from experience that the axis of such a spinning top moves around the vertical through its point of contact with the ground, sweeping out a cone as shown in the figure.
The motion of a rigid body which is not pivoted or fixed in some way is either a pure translation or a combination of translation and rotation. The motion of a rigid body which is pivoted or fixed in some way is rotation
Center of mass
The center of mass is a position defined relative to an object or system of objects. It is the average position of all the parts of the system, weighted according to their masses.
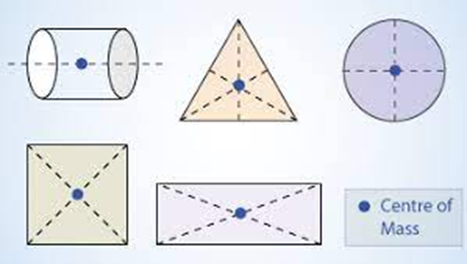
For simple rigid objects with uniform density, the center of mass is located at the centroid. For example, the center of mass of a uniform disc shape would be at its center. Sometimes the center of mass doesn't fall anywhere on the object. The center of mass of a ring for example is located at its center, where there isn't any material.
For more complicated shapes, we need a more general mathematical definition of the center of mass.
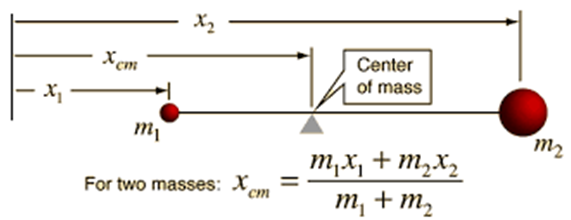
We shall first see what the center of mass of a system of particles is and then discuss its significance. For simplicity, we shall start with a two-particle system. Suppose we have two objects of mass m1 and m2, which are located on the x-axis at distances x1 and x2 from the origin. The Center of mass must be somewhere in between the two masses and let's suppose it is at a distance xcm from the origin.
So position of center of mass xcm =
For masses in two-dimensional plane x-y. Suppose we have ‘n’ masses with mass m1, m2, m3 … up to n which are at coordinates (x1, y1), (x2,y2), (x3, y3)... And so on.
Then x and y coordinates of the position of the center of mass Xcm and Ycm is given by,
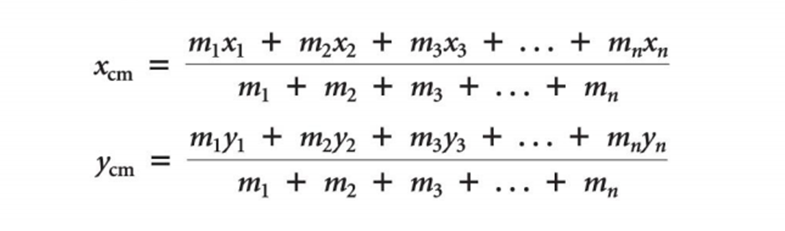
And similarly, we can extend this concept to 3-dimensional discrete distribution of masses to calculate the position of the center of mass (Xcm, Ycm, Zcm) using the masses of discrete mass and their coordinates.
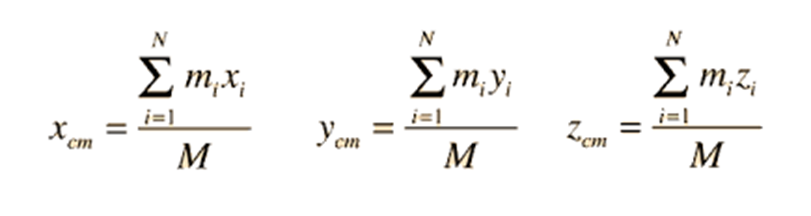
Above three equations can be combined into one equation using the notation of position vectors. Let ri be the position vector of i th particle and R be the position vector of the center of mass:
But most of the objects we have are objects with continuous mass distribution, so we have to do integration in place of summation to get the center of mass of the objects with continuous mass distribution.
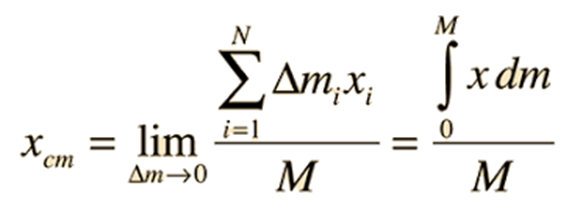
We can do the same for the calculation of Ycm and Z cm.
Examples of calculation of Center of mass
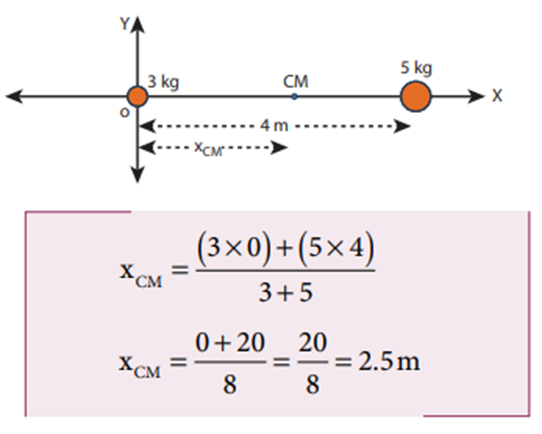
Example 1: Two masses of 3 kg and 5 kg kept at origin and x= 4 cm respectively along the x-axis. Then find the position of the center of mass.
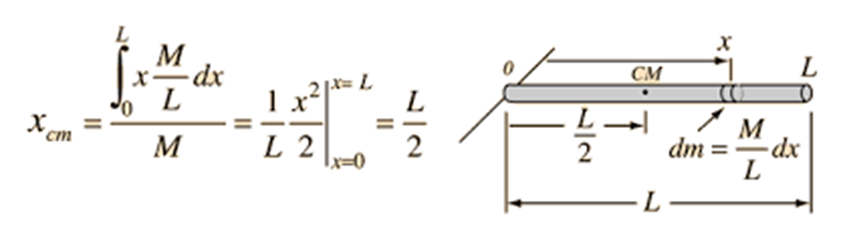
Example: Calculation of center of mass of a uniform rod.
Consider a uniform rod of length L and total mass M. Then the Center of mass of this will be at the middle of the rod Xcm=L/2
The motion of the center of mass
In this section, we will learn about the physical significance of the concept of the center of mass. We consider an object of total mass M to be made of up h ‘n’ particles of masses m1, m2, and m3….. At positions r1, r2, r3,... and so on. If R is the position of the center of mass.
Then
If we differentiate with respect to time both sides
We have then
We know that
where V is the velocity of the center of mass.
Differentiate eq 2 with respect to time again and use
where A is the acceleration of the center of mass.
Now using Newton’s second law F= ma,
we can write
Thus, the total mass of a system of particles times the acceleration of its center of mass is the vector sum of all the forces acting on the system of particles.
Note in equation 4 when we talk of the force F1 on the first particle, it is not a single force, but the vector sum of all the forces on the first particle and so on for other particles.
The center of mass of a system of particles moves as if all the mass of the system was concentrated at the center of mass and all the external forces were applied at that point.
Instead of treating extended bodies as single particles as we have done in earlier chapters, we can now treat them as systems of particles. We can obtain the translational component of their motion, i.e. the motion of the center of mass of the system, by taking the mass of the whole system to be concentrated at the center of mass and all the external forces on the system to be acting at the center of mass.
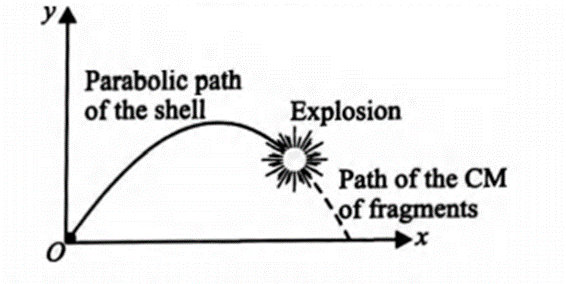
The motion of an explosive after the explosion.
Suppose a bomb is thrown and it is following a parabolic path (projectile motion) due to external force gravity on it. Suppose it explodes mid-air and breaks into fragments. These fragments then move in different directions in such a way that their center of mass will remain following the previous parabolic path the projectile would have followed with no explosion.
Linear momentum for a system of particle
We know that the linear momentum of the particle is
Where F is the force of the particle.
For ‘n’ no of particle total linear momentum is
Now comparing these equations we get
The above equation is nothing but Newton's second law to a system of particles. If the total external force acting on the system is zero.
So whenever the total force acting on the system of particles is equal to zero the total linear momentum P of the system is constant or conserved. This is nothing but the law of conservation of linear momentum of a system of particles.
A fun thing to do
Below is the link of the simulation of the balancing act
Tips:
- Consider the middle of the balance as the origin and left scales as negative and the right scales as positive.
- Using the formula of the center of mass in 1 Dimension, try to balance it by trying to keep the center of mass at origin.
What can you do with the simulation?
- You can put various masses on the balance and try to balance both sides by either changing masses or by changing its positions on the balance.
- Once you put your masses, change the toggle button to remove the supports and see what happens to your balance.
2. rotational motion
Angular velocity and linear velocity
Consider a rigid body rotating with about a fixed axis (the Z axis) which is perpendicular to the plane of the paper. Now consider a point P at a distance ‘r’ from the origin. As the rigid body rotates the particle at point P moves with a constant speed ‘v’ in a circular path as shown by the dotted line. Here ‘v ‘is the linear velocity of the particle at a distance ‘r’ from the origin
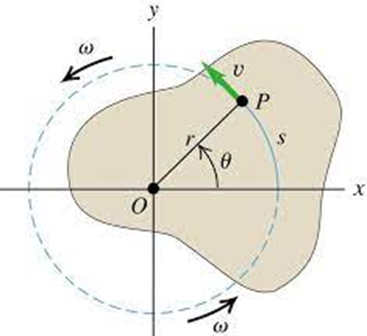
Suppose the particle P moves a linear displacement and angular displacement of ‘
If ‘r’ is the distance of particle P from the origin. Then
So we have the relation between linear and angular velocity
Important results from the relation
- The linear velocity is different at different points on the circle.
- It is zero at the center. It is a minimum in between the center and any point on the circumference.
- It is maximum at the circumference of the circle.
- However, angular velocity remains the same at all points on the circular path.
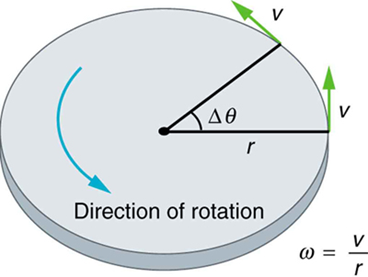
We refer to ω as the angular velocity of the whole body.
We have characterized pure translation of a body by all parts of the body having the same velocity at any instant of time. Similarly, we may characterize pure rotation by all parts of the body having the same angular velocity at any instant of time.
Angular displacement is considered as an axial vector: We know that angular displacement is the angle traced by a particle under circular motion. Since the direction of the displacement is along the axis, that’s why angular displacement is an axial vector.
Similar to the displacement, the angular velocity is also an axial vector quantity. We can find its direction by using the Right-hand Thumb Rule. In general, we have the relation
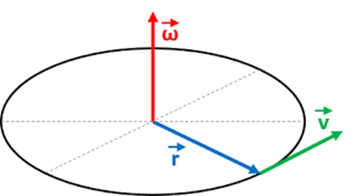
This rule says: Curl your fingers in a counterclockwise direction, and the thumb pointing outwards (along the axis) is the direction of the angular velocity. Similarly, if you curl your fingers in a clockwise direction, then the thumb pointing inwards gives the direction of ω.
Angular acceleration
In rotational motion, the concept of angular acceleration in analogy with linear acceleration is defined as the time rate of change of velocity in translational motion.
Angular acceleration, also called rotational acceleration, is a quantitative expression of the change in angular velocity that a spinning object undergoes per unit of time. It is a vector quantity, consisting of a magnitude component and either of two defined directions or senses.
The vector direction of the acceleration is perpendicular to the plane where the rotation takes place. Increase in angular velocity clockwise, then the angular acceleration velocity points away from the observer. If the increase in angular velocity is counterclockwise, then the vector of angular acceleration points toward the viewer.
Relation between linear acceleration and angular acceleration
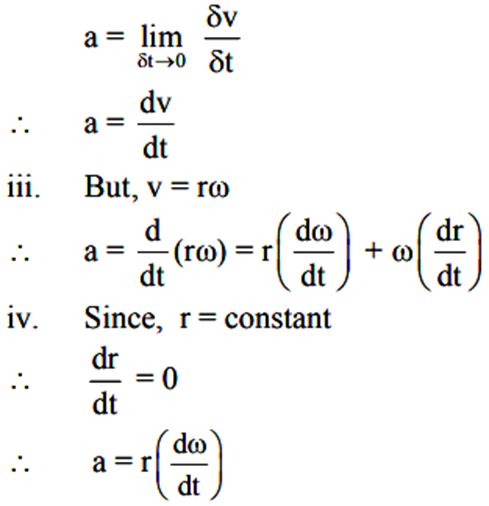
Which finally gives the relation
Moment of force: Torque
We have learned that the motion of a rigid body is a combination of both translational and rotational motion. But if we fix the rigid body by one point or line, it can do only rotational motion.
In translational motion, an external force is required for the translational motion to happen (to produce a linear acceleration in the body). What must be the rotational analog of force? What makes a rigid body rotate?
Take an example of a door. A door is a rigid body that can rotate about a fixed vertical axis passing through the hinges. What makes the door rotate? It is clear that unless a force has been applied the door does not rotate. But alone force cannot do the job.
If we apply the force on the hinge, the door will not rotate. But if we apply force at right angles to the door at its outer edge it is most effective in producing rotation. It is not the force alone, but how and where the force is applied is important in rotational motion.
The rotational analog of force is the Moment of force. The turning effect of a force is known as the moment of force, which is also known as torque.
It is the product of the force multiplied by the perpendicular distance from the line of action of the force to the pivot or point where the object will turn.
The magnitude of Torque
The SI unit of moment of a force is Newton-meter (Nm). It is a vector quantity.
Torque will be minimum when θ = 0, 180 Then
Torque will be maximum when
Since r × F is a vector product, properties of a vector product of two vectors apply to it.
Angular momentum
In translational motion, we have linear momentum which is the product of mass and linear velocity P= mv and we have seen the concept of conservation of linear momentum when a net external force is applied to the system is zero. What could be the rotational analog of linear momentum?
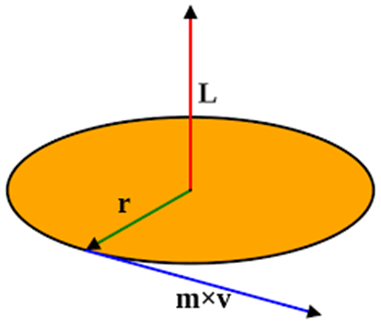
The rotational analog of linear momentum is angular momentum. Just like the moment of force is a vector product of r and F. The angular momentum is also a vector product of r and P (linear momentum)
Since angular momentum is the vector product of r and P, it is also a vector quantity and follows all the properties of the vector product.
L would be zero when
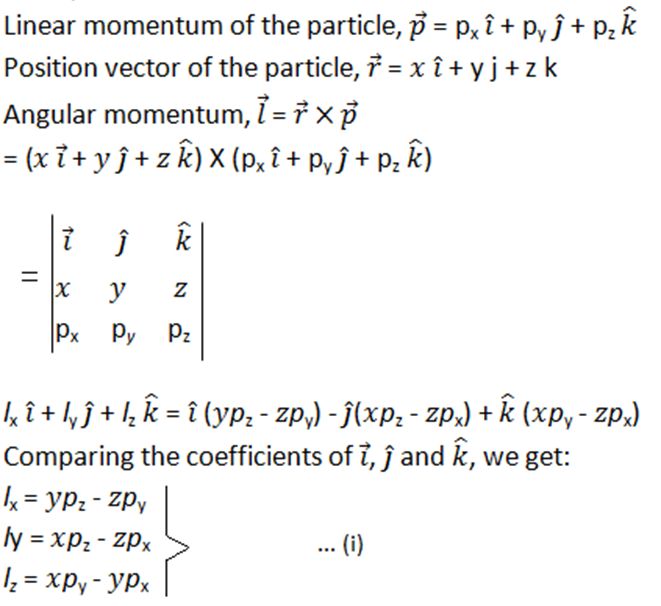
How to calculate L as a vector using r and F in vector form?
The physical quantities, a moment of force and angular momentum, have an important relationship between them. It is the rotational analog of the relation between force and linear momentum
Let us derive the relation between the moment of force and the angular momentum,
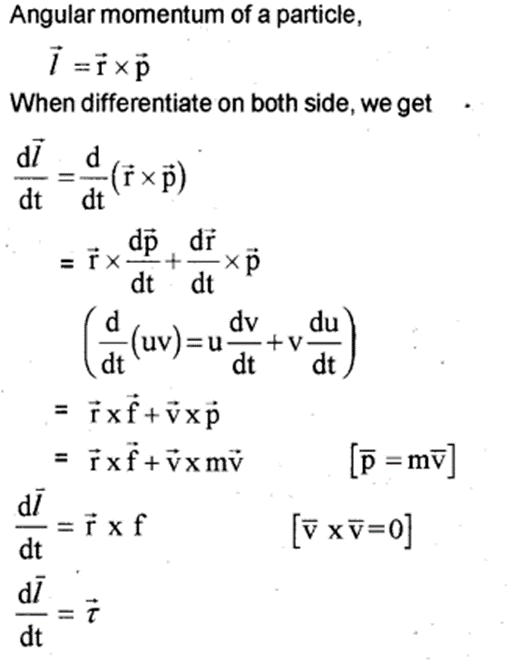
Thus, the time rate of change of the angular momentum of a particle is equal to the torque acting on it. This is the rotational analog of the equation F = dp/dt, which expresses Newton’s second law for the translational motion of a single particle
Moment of force and angular momentum
When no external force is applied on a system of particles, so from Newton’s second law
This relation suggests that when the external force on the system of particles is zero then its linear momentum is conserved.
We have rotational analog of this relation as ![]()
Thus the time rate of the total angular momentum of a system of particles about a point is equal to the sum of the external torques acting on the system of particles taken about the same point.
Conservation of angular momentum
![]()
Or we can say that L= constant.
Thus, if the total external torque acting on a system is zero. Then the total angular momentum of the system is conserved or remains constant. This is called the conservation of angular momentum.
This is the rotational analog of conservation of linear momentum in translational motion.
Equilibrium of rigid body
Equilibrium is a state of the body where neither the internal energy nor the motion of the body changes with respect to time. Let us try to understand the equilibrium of a rigid body.
If we have to define equilibrium the simplest definition would be it is a point where the net external force, as well as torque acting on the body about COM or any other point, is zero. But to be more specific for a rigid body equilibrium means both rotational and translational equilibrium. For example, consider the following situation:
In the mechanical equilibrium of a rigid body, the linear momentum and angular momentum remain unchanged with time. This implies that the body under the influence of external force neither has a linear acceleration nor an angular acceleration. We, therefore, can say that:
- If the total force on a rigid body is zero then the body shows translational equilibrium as the linear momentum remains unchanged despite the change in time.
- If the total torque on a rigid body is zero then the body shows rotational equilibrium as the angular momentum does not change with time.
Mechanical equilibrium when we sum up the above findings of translational and rotational equilibrium we get the following relations.

A body may be in partial equilibrium, i.e., it may be in translational equilibrium and not in rotational equilibrium, or it may be in rotational equilibrium and not in translational equilibrium.
In the figure given below, we have a rod PR and Q is the position of the center of mass of the rod PR such that PQ= QR= a, Two forces F of same magnitude are applied at the two ends of the rod at P and R as shown.
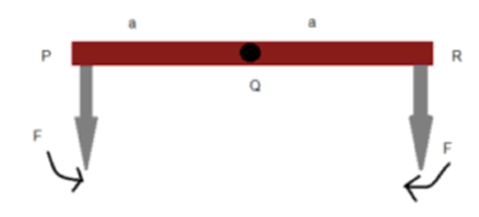
The net torque, in this case, will be zero, as one force is anticlockwise torque and the other in a clockwise direction, so it will be in rotational equilibrium. But since the net Force on the rod is not zero, so it is not in translational equilibrium since
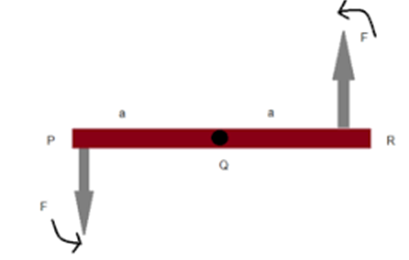
In the next example given below, the direction of force at R is reversed. Now the net force on the rod is zero so it will be in translational equilibrium, But torque due to both are forces are in an anticlockwise direction so net torque is not zero, so there is no rotational equilibrium.
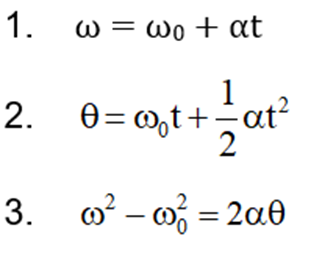
Rigid body rotation and its equations
Like in translational motion we had an equation of motion to describe the dynamics of translation motion of the body. Similarly, we have equations that determine the dynamics of the rotational motion.
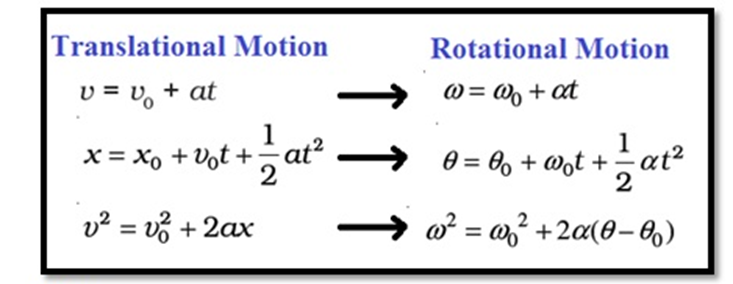
Where
When initial angular displacement
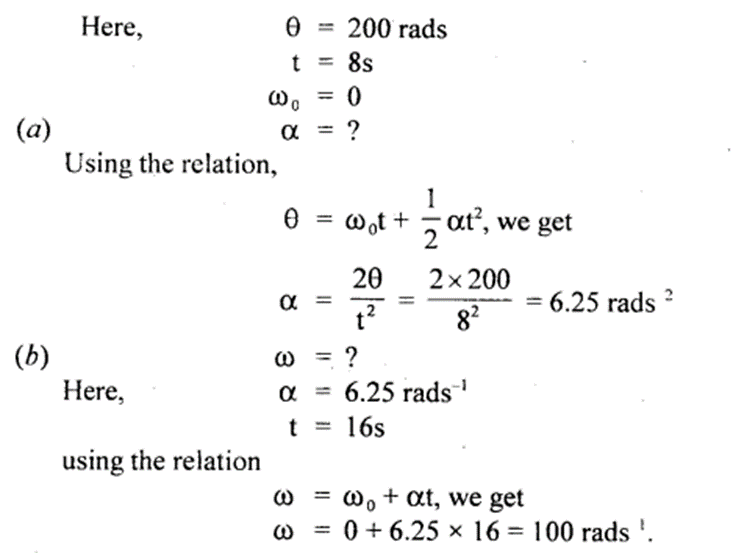
For example:
Question: A wheel starts from rest and rotates 200 radians in 8 seconds.
- What is the angular acceleration of the wheel?
- What is the final angular velocity after 16 seconds?
A fun thing to do!
Below is the link of the game
Balancing Act Game: In this game, you need to answer the questions on balancing acts.
- Sometimes you need to balance that by putting masses somewhere
- Sometimes you need to just answer, which side of the balance will come down?
- Sometimes you need to calculate the mass of the unknown by trying to balance it with other objects.
Conceptual understanding required to win the challenge:
- You need to understand the concept or torque and also the formula of torque
- Also, you need to understand that it will balance when the net torque will be zero.
3. Moment of Inertia
Moment of Inertia
The moment of inertia of an object is a calculated measure for a rigid body that is undergoing rotational motion around a fixed axis: that is to say, it measures how difficult it would be to change an object's current rotational speed. That measurement is calculated based upon the distribution of mass within the object and the position of the axis, meaning that the same object can have very different moments of inertia values depending upon the location and orientation of the axis of rotation.
Moment of Inertia in rotational motion is analogous to mass in translational motion.
The moment of inertia of an object rotating around a fixed object is useful in calculating two key quantities in rotational motion:
Rotational kinetic energy: ![]()
Angular Momentum: L = Iω
You may notice that the above equations are extremely similar to the formulas for linear kinetic energy and momentum, with a moment of inertia "I" taking the place of mass "m" and angular velocity "ω" taking the place of velocity "v," which again demonstrates the similarities between the various concepts in rotational motion and in the more traditional linear motion cases.
The International System of Units (SI unit) of the moment of inertia is one kilogram per meter squared (kg-m2).
Calculation of Moment of Inertia
To calculate the moment of inertia in its most general form. It basically consists of the following steps:
- Measure the distance r from any particle in the object to the axis of symmetry.
- Square that distance.
- Multiply that squared distance times the mass of the particle.
- Repeat for every particle in the object.
- Add all of these values up.
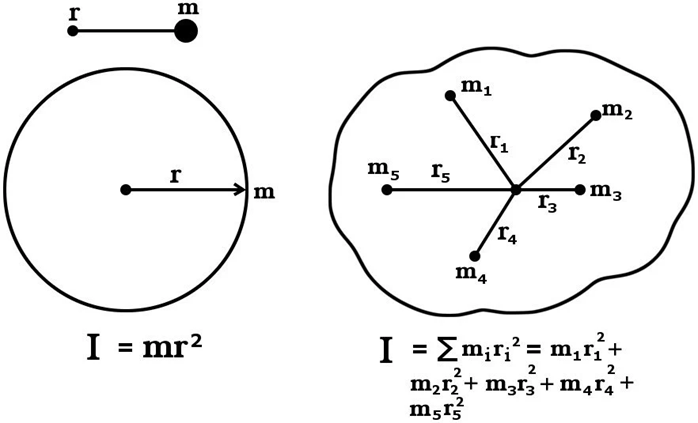
Moment of Inertia is denoted by ‘I’ =
Radius of gyration
The radius of gyration of anybody about the axis of rotation is defined as that radial distance from the axis of rotation, at which the entire mass of that body is concentrated. Thus, the point will have a moment of inertia at this particular point also. It is denoted by k.
This is also referred to as the measure of the way in which the mass of a rotating rigid body can be distributed about its axis of rotation.
If the moment of Inertia is represented by me, then its value is
Let
Then, MOI or the moment of inertia of the body on its rotational axis is calculated as
If the mass of all the particles is the same as m, then the equation can be written as:
Moment of Inertia
It can also be written as
If we multiply and divide the equation by n, then the equation will be,
We have total mass M= m n so,
Therefore we have
So, radius of gyration 
This clearly shows that k is the radius of gyration of a body about an axis is the root of the mean square distance of several different body particles from the rotational axis.
Theorems of perpendicular and parallel axis
There are two useful theorems relating to the moment of Inertia. By applying these theorems it is easier to find out the moment of inertia of some regular-shaped bodies.
Parallel Axis theorem - The Parallel axis theorem states that the moment of inertia of a body (rigid body) about an axis is equal to its moment of inertia about an axis passing through the center of mass of the body parallel to the given axis plus the product of the mass of the body and the square of the perpendicular distance between the two axes parallel to each other.
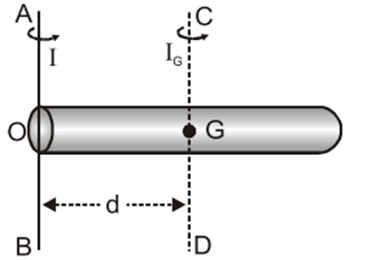
Where I = moment of inertia about axis AB and IG = moment of inertia about the center of the mass CD, M= total mass of rod and, d = distance between axis AB and CD
Perpendicular Axis theorem
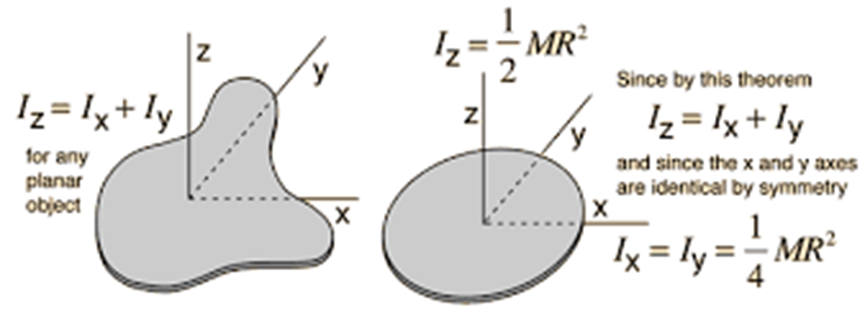
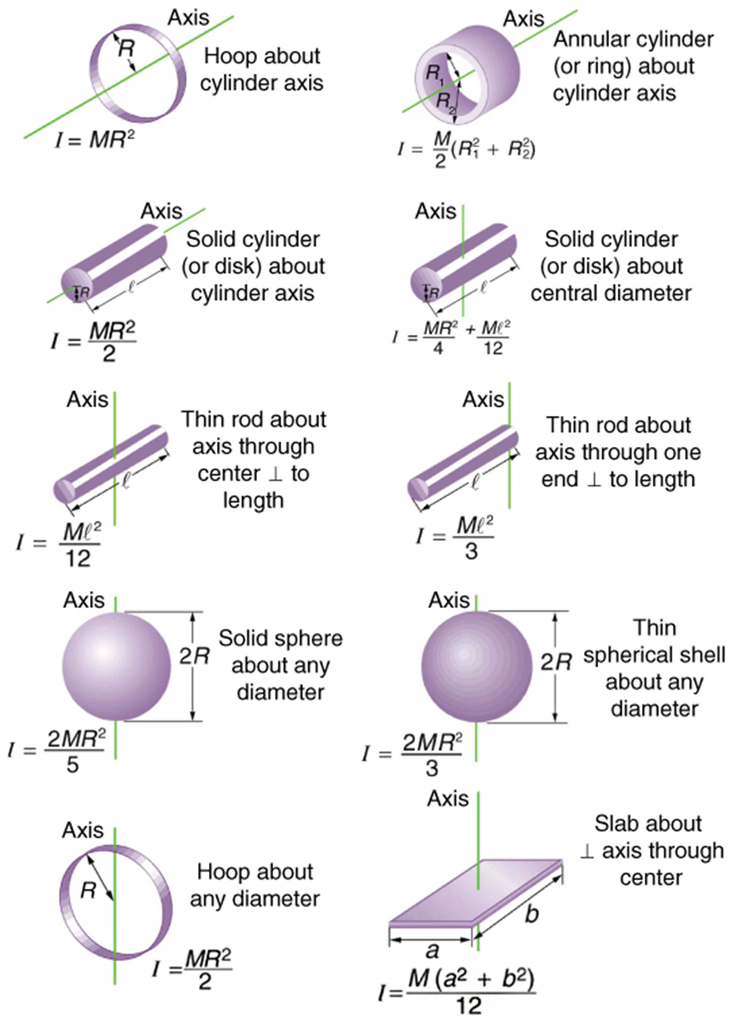
Moment of Inertia of various geometric shapes about the different axis of rotation
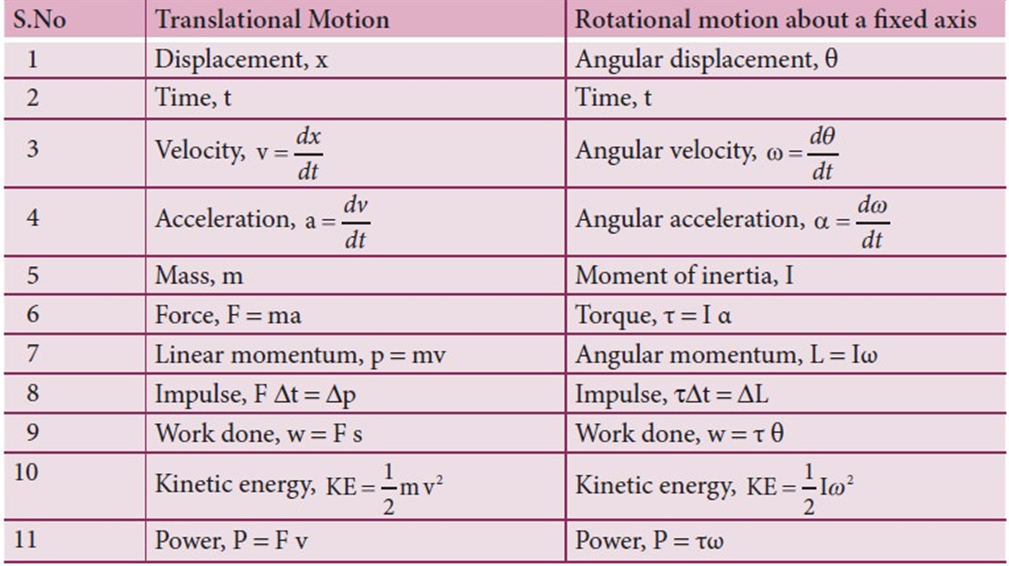
Comparison between translational and rotational motion